Clear Sky Science · it
Attuatori in lega a memoria di forma a filo: modellazione, progettazione e controllo
Fili metallici che «ricordano» la loro forma
Immaginate un sottile filo metallico che può tirare come un muscolo, flettere silenziosamente il dito di un robot, rimodellare l’ala di un aeroplano in volo o stringere delicatamente un cuore in difficoltà – tutto semplicemente riscaldandolo e raffreddandolo. Questo articolo di revisione esamina questi fili, realizzati con leghe a memoria di forma (SMA), e spiega come funzionano, come gli ingegneri li progettano e li controllano, e dove trovano già impiego reale in robot, aeromobili, dispositivi medici e tecnologie indossabili.
Come nascono i fili metallici intelligenti
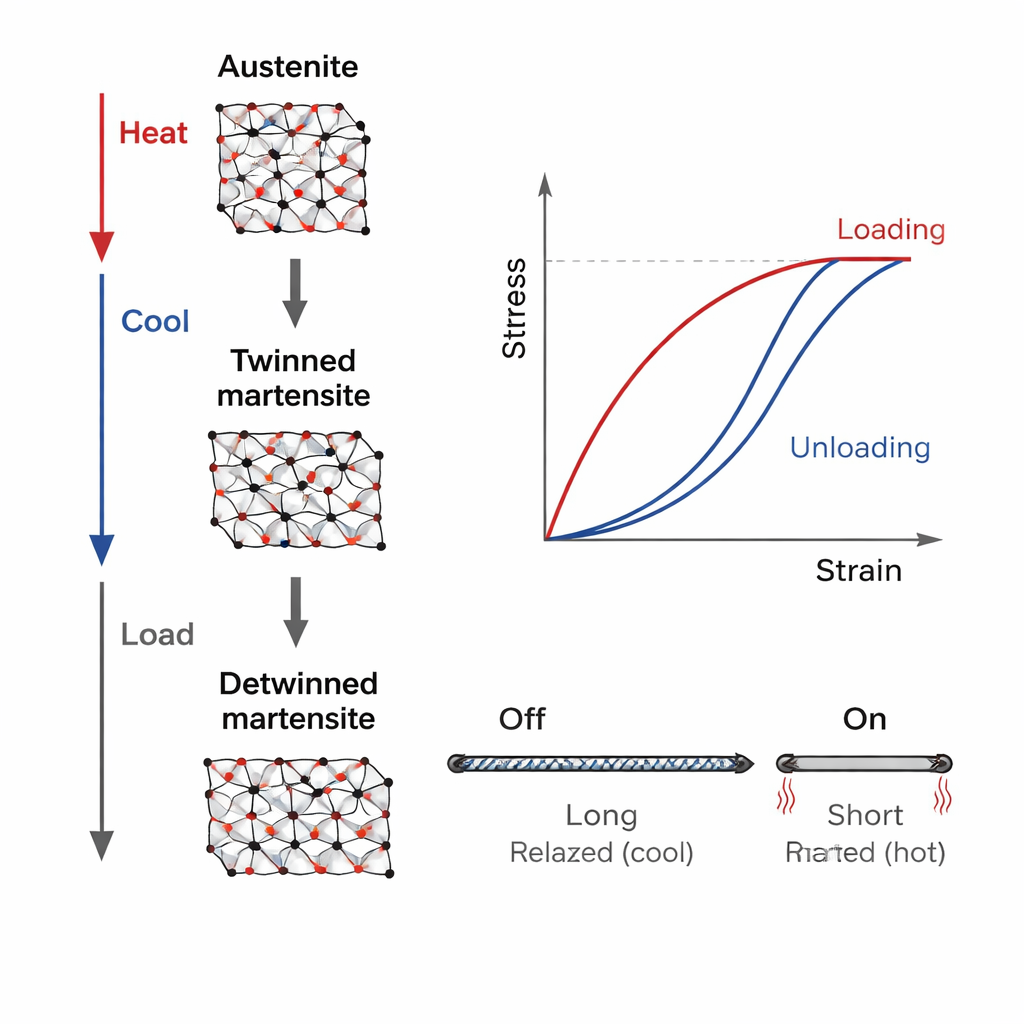
Le leghe a memoria di forma sono metalli speciali che possono essere deformati e poi tornare a una forma preimpostata quando cambia la loro temperatura. In una modalità, chiamata effetto memoria di forma, si può piegare il filo quando è freddo e relativamente morbido; quando viene riscaldato, torna bruscamente alla sua forma originale. In un’altra modalità, la superelasticità, la lega può allungarsi sotto carico e poi ritornare alla forma iniziale una volta rimosso il carico. All’interno del metallo, questo comportamento deriva da trasformazioni di fase solido–solido tra diversi ordinamenti cristallini, il che rende la risposta altamente non lineare e in parte difficile da prevedere. Poiché i fili SMA sono sottili, gli ingegneri possono di solito considerarli come elementi monodimensionali, semplificando i modelli matematici che descrivono come temperatura, tensione, deformazione e corrente elettrica siano collegati.
Dalle equazioni ai modelli guidati dai dati
Per usare questi fili intelligenti in modo affidabile, i progettisti hanno bisogno di modelli che prevedano quanto possono tirare, quanto si muovono, quanto si scaldano e come cambia la loro resistenza elettrica. I classici modelli «costitutivi» trattano il filo come un materiale continuo e tengono traccia di come le sue fasi interne cambiano con la tensione e la temperatura. Questi modelli sono efficienti ma si basano su assunzioni semplificative. Parallelamente, i ricercatori usano sempre più apprendimento automatico e reti neurali per apprendere direttamente dal dato sperimentale il comportamento del filo, catturando sottili isteresi ed effetti di storia. Un’altra linea di lavoro importante esamina come evolvono la resistenza elettrica e la temperatura durante il riscaldamento tramite corrente, abilitando il self-sensing – la capacità di stimare forza o movimento misurando la resistenza invece di aggiungere sensori separati.
Costruire il movimento: carichi semplici, strutture morbide e muscoli artificiali
Sul versante hardware, l’articolo organizza gli attuatori a filo SMA in base al tipo di carico a cui sono soggetti. Negli allestimenti più semplici a «carico lineare», un filo tira contro una molla o un peso per azionare pinze o meccanismi di rilascio spaziali. Sistemi più avanzati a «carico non lineare» incorporano fili in travi flessibili, polimeri morbidi, tessuti o strutture tipo origami per ottenere grandi movimenti di flessione, robot che strisciano e guanti esaustetti tessuti. Configurazioni differenziali usano due o più fili opposti, imitando coppie di muscoli come bicipite e tricipite, per fornire movimento rapido e reversibile in giunti come gomiti e caviglie artificiali. Poiché un filo SMA può accorciarsi solo di circa l’8%, un tema di progettazione importante è l’amplificazione della corsa: avvolgere fili lunghi attorno a pulegge, disporli in percorsi curvi, usare stadi modulari scorrevoli o rotanti, oppure adottare molle SMA per ottenere movimenti maggiori in spazi ridotti.
Insegnare ai fili intelligenti ad obbedire
Controllare questi attuatori è impegnativo perché la loro risposta dipende sia dalla temperatura sia dalla storia meccanica. L’articolo passa in rassegna uno spettro di strategie di controllo, dai classici regolatori PID a schemi più sofisticati. Gli approcci basati sul modello utilizzano equazioni derivate dalla fisica o modelli di isteresi per progettare controllori a scorrimento e compensatori feedforward che contrastano la non linearità. Controllori basati su reti neurali e apprendimento per rinforzo spingono oltre, imparando come pilotare il filo per un moto accurato senza fare affidamento su modelli perfetti. Allo stesso tempo, i metodi di controllo con self-sensing sfruttano la variazione di resistenza del filo come segnale di retroazione integrato, talvolta combinato con reti neurali, per stimare posizione o forza senza ingombranti sensori esterni.
Usi reali e direzioni future
Gli attuatori SMA in forma di filo stanno già muovendo pinze morbide per robot, minuscoli robot striscianti, ali di aeromobili morphing, dispositivi di rilascio per satelliti, pompe e stent impiantabili, fasce di assistenza cardiaca, capi compressivi, tute esoscheletriche e guanti per la riabilitazione. In tutti questi settori permangono ostacoli comuni: raffreddamento lento e accumulo di calore, fatica su molteplici cicli, complessità del controllo e costi di produzione. Gli autori sostengono che il progresso dipenderà dall’integrazione di tre filoni: migliori modelli multiscala e arricchiti dai dati, progettazioni strutturali più intelligenti che combinino SMA con elettronica flessibile e materiali multifunzionali, e strategie di controllo intelligenti che si adattino online. Immaginano quadri unificati di «modellazione–progettazione–controllo», supportati da gemelli digitali e apprendimento automatico, in grado di co-ottimizzare questi aspetti. Per il lettore non esperto, il messaggio è che questi fili mutaforma stanno maturando da curiosità di laboratorio a muscoli artificiali pratici, con il potenziale di rimodellare silenziosamente macchine, dispositivi medici e sistemi indossabili negli anni a venire.
Citazione: Zhang, R., Yue, H., Sun, H. et al. Wire-form shape memory alloy actuators: modeling, design, and control. Microsyst Nanoeng 12, 76 (2026). https://doi.org/10.1038/s41378-026-01161-z
Parole chiave: lega a memoria di forma, robotica morbida, attuatori intelligenti, strutture morphing, dispositivi indossabili