Clear Sky Science · it
Analisi degli errori di fase per le modalità operative dei giroscopi MEMS basata sulla misura in modalità force-to-rebalance
Perché i piccoli giroscopi contano
Dallo stabilizzare droni al guidare veicoli autonomi, piccoli sensori di movimento noti come giroscopi MEMS mantengono silenziosamente gli apparati moderni in equilibrio e sulla giusta rotta. Per misurare la rotazione con precisione, questi chip dipendono da anelli di controllo elettronici temporizzati con cura. Questo articolo esplora come sottili disallineamenti temporali — chiamati errori di fase — all’interno di questi anelli possano degradare le prestazioni, e mostra quali di questi errori sono realmente rilevanti e come correggerli affinché i giroscopi restino precisi e affidabili.
Due vibrazioni che avvertono la rotazione
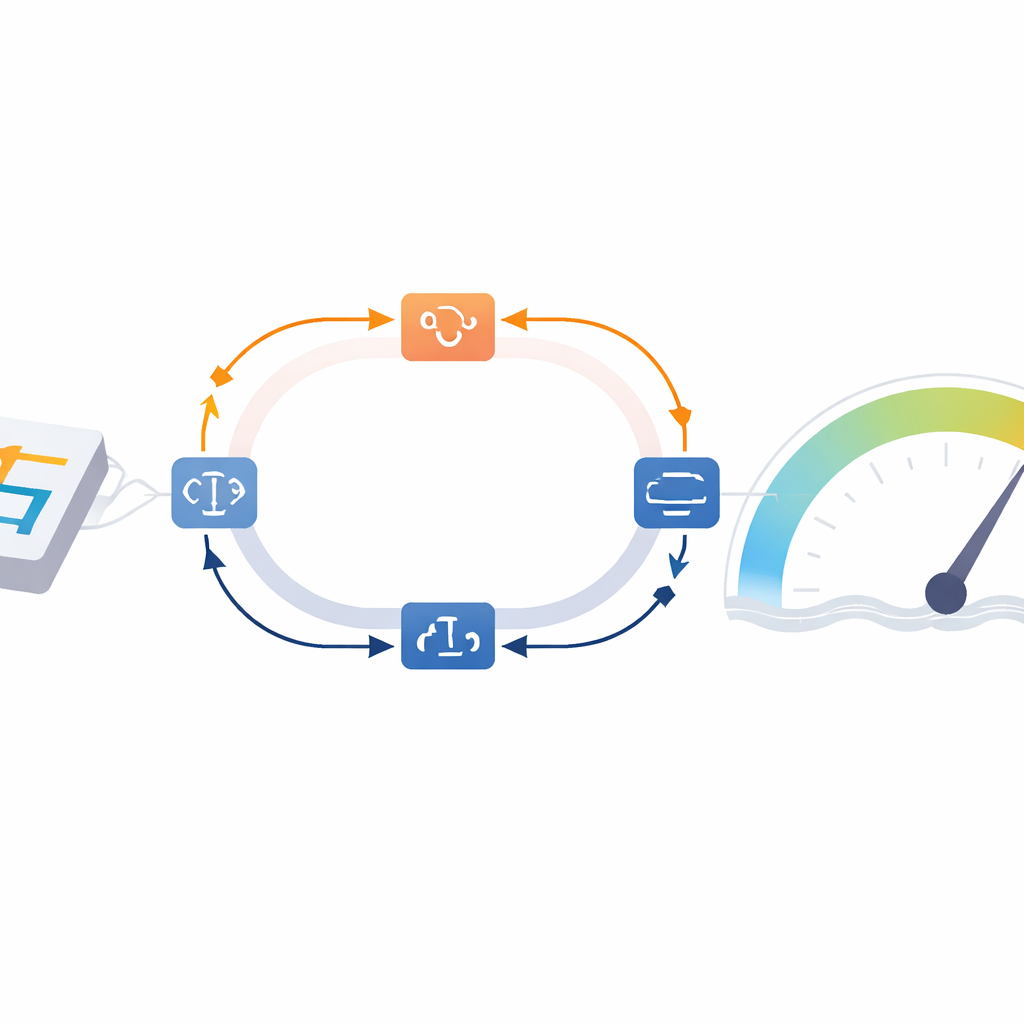
Un giroscopio MEMS funziona facendo vibrare una piccola struttura in silicio in due direzioni perpendicolari: una modalità di drive che viene attivamente eccitata e una modalità di rilevamento che percepisce la spinta laterale generata quando il dispositivo ruota. L’elettronica mantiene costante la vibrazione di drive e converte il piccolo moto della modalità di rilevamento in una misura di velocità angolare. In molti giroscopi avanzati si usa un metodo chiamato force-to-rebalance (FTR): invece di lasciare la struttura di rilevamento muoversi liberamente, l’elettronica contrappone una forza sufficiente a cancellarne il moto. La quantità di forza correttiva rivela quindi la velocità di rotazione. Questo approccio è apprezzato per la sua stabilità, ma dipende fortemente da un sincronismo preciso tra i segnali.
Dove il tempo sfocia nell’errore
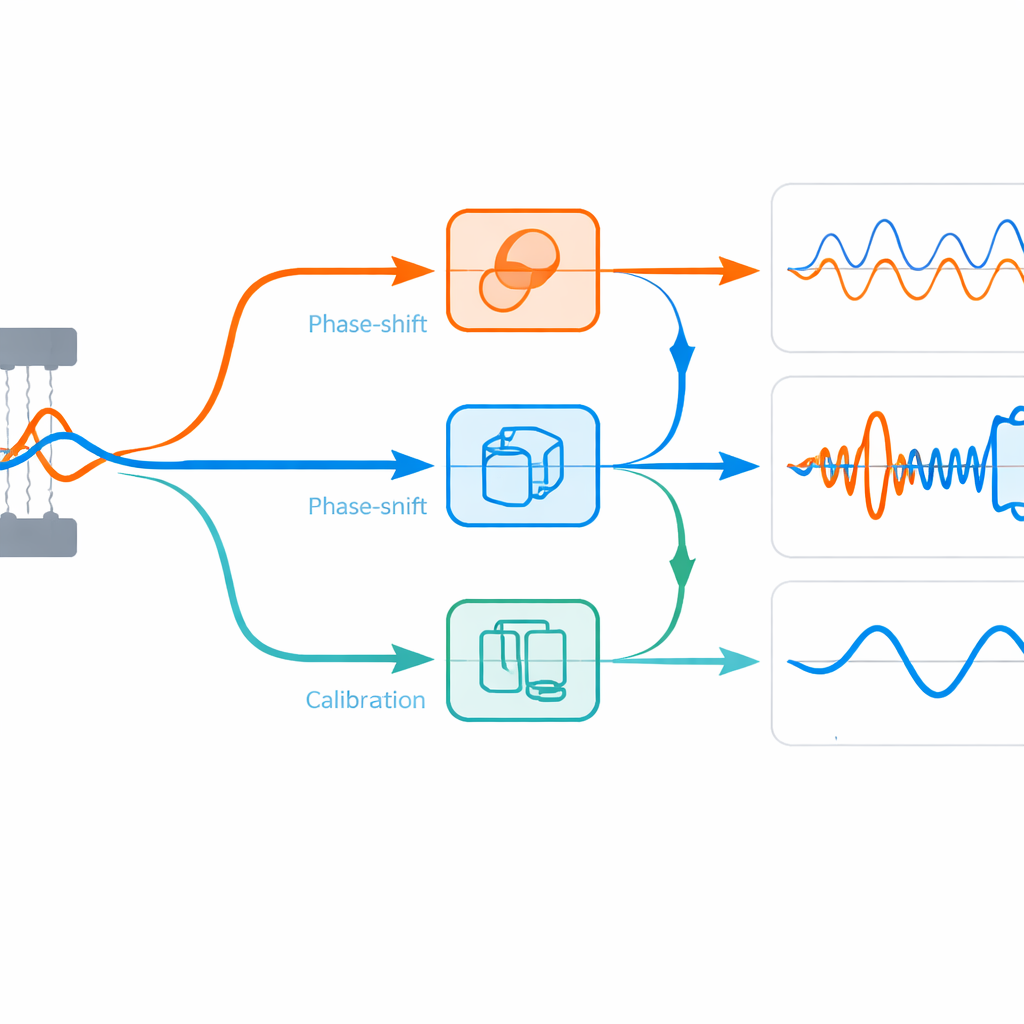
Nei dispositivi reali, i segnali devono attraversare circuiti analogici che trasformano la capacità variabile in tensione, elaborazione digitale all’interno di un chip FPGA e convertitori che collegano il mondo analogico e quello digitale. Ognuno di questi passaggi può spostare la fase, o il timing, dei segnali di un piccolo angolo. Gli autori raggruppano questi errori di fase in due categorie semplici in ciascun percorso di vibrazione: quelli che avvengono durante la misura e l’elaborazione dei segnali (percorso di feedback) e quelli che si verificano durante la generazione dei segnali di attuazione (percorso forward). Poi costruiscono un modello matematico completo degli anelli di controllo FTR, includendo entrambi i percorsi in entrambe le modalità, e analizzano come tali errori influenzino grandezze critiche come bias, fattore di scala, banda passante e la capacità di cancellare accoppiamenti indesiderati, noti come errore di quadratura.
Indagare il lato drive: per lo più innocuo
Dal lato di drive, gli errori di fase fanno sì che l’anello di controllo si agganci leggermente lontano dalla vera frequenza naturale della struttura. Per mantenere costante il livello di vibrazione, l’elettronica risponde aumentando l’ampiezza di drive. Intuitivamente questo potrebbe preoccupare, perché un drive più intenso può infiltrarsi nel percorso di rilevamento come accoppiamento elettrico indesiderato (feedthrough). Tuttavia, il giroscopio studiato qui utilizza un front-end progettato con cura con un portante ad alta frequenza e diodi a anello che sopprimono in gran parte questa perdita. Simulazioni ed esperimenti dettagliati a tre temperature mostrano che, una volta che il dispositivo si è riscaldato, gli errori di fase dell’anello di drive si stabilizzano su valori quasi costanti e, dopo una semplice calibrazione, hanno un impatto trascurabile su bias, rumore, correzione della quadratura o banda FTR.
Tempistica lato sense: il vero colpevole
La modalità di rilevamento racconta una storia diversa. Qui, il segnale di feedback che contrasta il moto della massa vibrante e i segnali di riferimento usati per estrarre le componenti di velocità e quadratura devono essere strettamente allineati. Gli autori derivano un modello dell’anello FTR che include esplicitamente un errore di fase nel percorso di feedback del sense e un altro nella demodulazione forward. Dimostrano analiticamente e poi sperimentalmente che l’errore di fase nel percorso di feedback modifica direttamente il fattore di scala — la conversione tra rotazione reale e uscita misurata — e peggiora l’uscita a velocità zero, che idealmente dovrebbe essere perfettamente stabile quando il giroscopio è a riposo. Al contrario, l’errore di fase nel percorso forward ha solo una influenza minore su queste caratteristiche statiche, e entrambi gli errori lato sense hanno scarso effetto sulla banda dinamica.
Calibrare ciò che conta di più
Partendo da queste intuizioni, il team propone procedure di calibrazione pratiche. Per la modalità drive, misurano le differenze di fase tra onde di riferimento interne e il segnale di drive reale, quindi regolano le fasi digitali fino a quando i segnali diventano ortogonali e l’ampiezza di drive scende a un minimo, rivelando e annullando sia gli errori di fase forward sia quelli di feedback. Per la modalità sense, allineano prima il segnale di feedback con un riferimento per correggere l’errore critico del percorso di feedback. Poi aumentano deliberatamente il segnale di quadratura in modo che la sua fase domini, rendendo più semplice mettere a punto l’errore residuo del percorso forward. Test a diverse temperature mostrano che queste correzioni si comportano come offset costanti che devono essere ri-stimati quando le condizioni cambiano, ma una volta impostate stabilizzano notevolmente il fattore di scala e il bias.
Cosa significa per i sensori futuri
In termini semplici, questo studio mostra che non tutti gli errori di temporizzazione in un giroscopio MEMS sono ugualmente importanti. Con il feedthrough accuratamente soppresso, gli errori di fase nell’anello di drive e nel percorso forward del sense hanno poco effetto sulla misura finale di rotazione. Il colpevole dominante è l’errore di fase nel percorso di feedback del sense, che piega direttamente il “metro” usato per misurare la rotazione e sposta la lettura a riposo. Indicando questo punto debole e proponendo strategie di calibrazione mirate, il lavoro fornisce una road map per progettare giroscopi con migliore stabilità in funzione e apre la strada a schemi di compensazione in tempo reale che possono mantenere la precisione anche quando temperatura e altre condizioni variano.
Citazione: Jia, J., Zhang, H., Gao, S. et al. Phase error analysis for MEMS gyroscopes operational modes based on force-to-rebalance rate measurement mode. Microsyst Nanoeng 12, 86 (2026). https://doi.org/10.1038/s41378-025-01144-6
Parole chiave: giroscopio MEMS, controllo force-to-rebalance, errore di fase, calibrazione del sensore, navigazione inerziale