Clear Sky Science · it
Un framework di Gaussian splatting guidato da due prior per la ricostruzione ad alta fedeltà di reperti museali
Perché preservare i reperti in 3D è importante
I musei di tutto il mondo stanno accelerando la creazione di copie digitali dettagliate di reperti fragili, dalle campane di bronzo ai vasi in porcellana. Queste repliche virtuali possono essere esplorate online, studiate senza maneggiare gli originali e conservate anche se gli oggetti fisici subiscono danni. Tuttavia molte collezioni dispongono solo di dati grezzi di scansione 3D salvati come nuvole di punti colorate—milioni di punti nello spazio—senza fotografie corrispondenti. Questo articolo introduce un nuovo modo per trasformare quei soli punti in modelli 3D realistici, aprendo così vasti archivi di dati del patrimonio «dormienti» a esposizioni digitali vivide.
Il problema delle repliche digitali odierne
Finora le ricostruzioni 3D di alta qualità hanno seguito tipicamente due percorsi. Uno usa foto ordinarie da molte angolazioni per stimare forma e colore, ma fatica sulle superfici lisce e a bassa texture comuni nei reperti e non riesce facilmente a recuperare la scala reale. L’altro impiega scanner laser precisi per catturare direttamente la geometria, talvolta con telecamere separate per il colore. Questa via è accurata ma costosa, e comunque non produce direttamente le resa ricche e consapevoli dell’illuminazione richieste dalle moderne mostre virtuali. Una tecnica più recente chiamata 3D Gaussian splatting può renderizzare scene in tempo reale con realismo impressionante, ma normalmente dipende da immagini fotografiche e da una nuvola di punti iniziale costruita da quelle immagini. Per oggetti museali archiviati solo come nuvole di punti, tutta questa catena si interrompe.
Una nuova via dai punti ai duplicati digitali
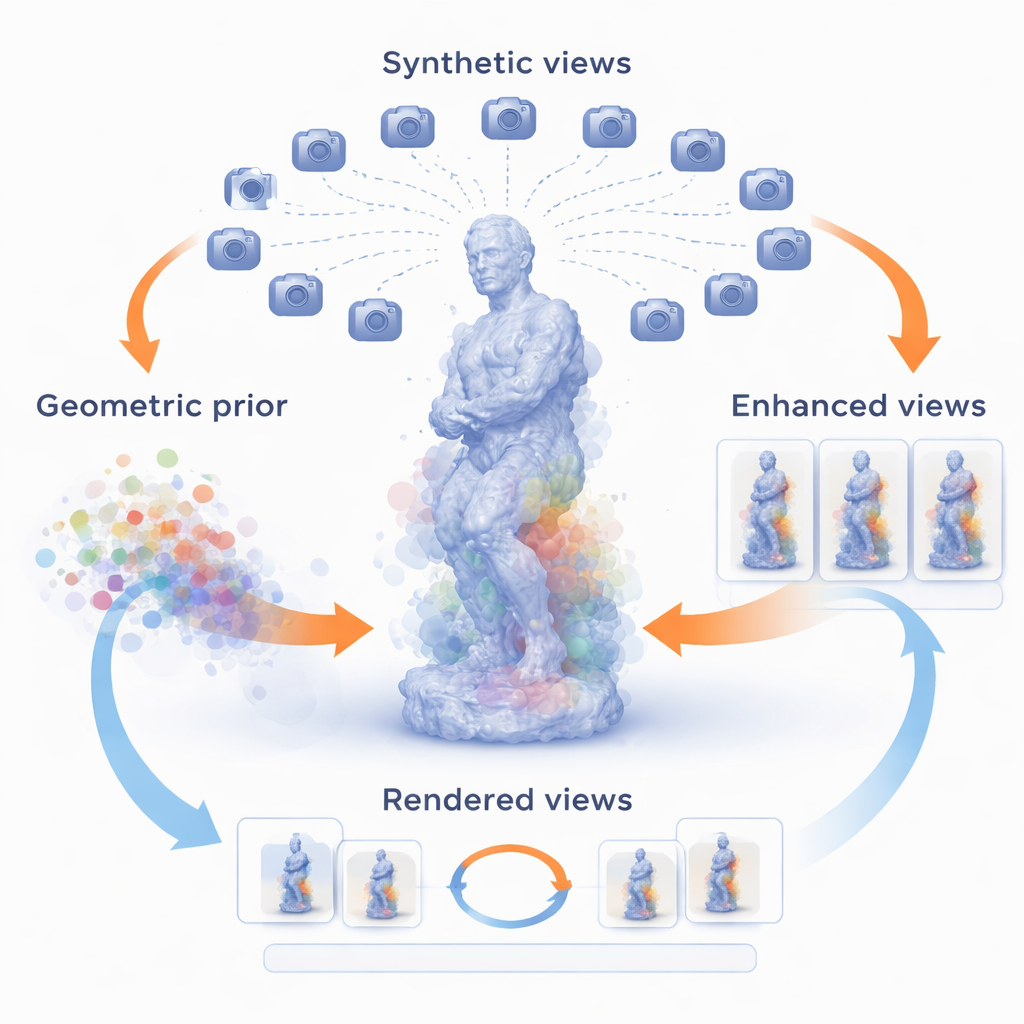
Gli autori propongono un framework «a due prior» che parte da una nuvola di punti colorata di alta qualità e arriva a un modello dettagliato pronto per il rendering—senza necessità delle fotografie originali. Il primo prior è geometrico: un metodo di campionamento intelligente scandaglia la scansione densa, misurando variazioni di forma e colore su molte scale. I punti che catturano bordi della superficie, incisioni, crepe o bruschi cambiamenti di colore ottengono maggiore importanza, mentre le regioni piatte o uniformi vengono diradate. Un sottoinsieme attentamente scelto di punti viene quindi usato per inizializzare milioni di piccoli blocchi 3D, chiamati primitive gaussiane, che formano l’ossatura del modello finale e trasportano la scala reale corretta.

Insegnare al modello come dovrebbe apparire l’oggetto
Il secondo prior è visivo: invece di usare fotografie reali, il metodo genera immagini di addestramento «ideali» direttamente dalla nuvola di punti. Telecamere virtuali vengono posizionate tutto intorno al reperto, incluse angolazioni difficili da ottenere in una galleria reale, e ogni punto viene proiettato in queste viste per creare immagini sintetiche a colori. Un algoritmo di visibilità rimuove i punti che dovrebbero essere nascosti da una data angolazione, evitando il fenomeno del ghosting in cui dettagli di sfondo appaiono erroneamente in primo piano. Poiché immagini e geometria provengono dalla stessa fonte, non c’è disallineamento tra forma e colore—un problema frequente nei flussi di lavoro tradizionali che combinano scansioni separate e set fotografici.
Pulizia e raffinatezza delle viste sintetiche
Le proiezioni grezze dai punti tendono a mostrare bordi frastagliati e dettagli sottili un po’ sfocati. Per risolvere questo, le immagini sintetiche sono sottoposte a un passaggio di anti-aliasing che leviga i contorni a «gradini» preservando i pattern, e poi a una rete di super-risoluzione basata su transformer. Questa rete tratta le molte viste come fotogrammi di un video e impara a prendere piccoli frammenti di dettaglio dalle immagini vicine che vedono la stessa area da angolazioni leggermente diverse. Il risultato è un insieme di viste nitide e ad alta risoluzione che fungono da forte segnale di addestramento: il modello 3D a gaussiane viene ripetutamente renderizzato e aggiustato affinché le sue uscite corrispondano il più possibile a queste immagini migliorate.
Che cosa significa per i musei e oltre
I test su un nuovo dataset di patrimonio culturale e su benchmark 3D standard mostrano che questo approccio a due prior produce render più chiari e accurati rispetto a diverse varianti di Gaussian splatting di punta, con un recupero notevolmente migliore di decorazioni delicate e una forma complessiva più fedele. Per i musei che già possiedono nuvole di punti precise ma non dispongono di fotografie utilizzabili, il metodo offre un modo pratico per ridare vita a vecchie scansioni, trasformandole in surrogati digitali interattivi adatti per esposizioni, didattica e ricerca. Il principale avvertimento è che l’approccio presuppone che le scansioni originali siano dense e complete—se i dati sono scarsi o gravemente corrotti, i benefici diminuiscono. Tuttavia, per le molte collezioni che soddisfano questo requisito, il framework fornisce un ponte potente dalle misure grezze verso reperti virtuali convincenti.
Citazione: He, Y., Zhang, X., Xie, Z. et al. A dual-prior driven Gaussian splatting framework for high-fidelity reconstruction of museum artifacts. npj Herit. Sci. 14, 69 (2026). https://doi.org/10.1038/s40494-026-02330-z
Parole chiave: patrimonio digitale, ricostruzione 3D, nuvole di punti, Gaussian splatting, reperti museali