Clear Sky Science · he
מיפוי תפוסה הסתברותי בהשראת המוח עם אדריכלות סמלים וקטורית
רובוטים שרואים את העולם כתפריל
כל רכב אוטונומי, רובוט מחסנים או שואב אבק ביתי זקוק לתמונה מנטלית מהירה של הסביבה: מה מוצק, מה ריק ומה עדיין לא ידוע. מאמר זה מציג דרך חדשה שבה רובוטים בונים את התמונה הזו — הנקראת מפת רשת תפוסה — שאולה רעיונות מאופן שבו המוח עשוי לייצג מידע, במטרה לשמור על נכונות המפות תוך השגת מהירות ויעילות חישובית גבוהה בהרבה.
להפוך פעימות חיישן גולמיות למפת עולם
רובוטים משתמשים לעתים קרובות בסורקי לייזר או חיישני מרחק אחרים כדי לאסוף מידע בזמן תנועה, יצירת ענני נקודות שמראים היכן יש עצמים והיכן החלל פנוי. טכניקה קלאסית, מיפוי רשת תפוסה, מחלקת את הסביבה לתאים זעירים, כמו פיקסלים על מסך, ומייחסת לכל תא הסתברות לתפוסה. שיטות מסורתיות מתייחסות לזה כבעיה סטטיסטית כבדה, עוקבות בקפידה אחר אי־הוודאות אך צורכות הרבה זמן וזיכרון. שיטות מבוססות רשתות־עצביות חדשות הן מהירות יותר ויכולות למלא חורים, אבל הן מתנהגות כמו תיבות שחורות, קשה לסמוך עליהן בסביבות קריטיות לבטיחות ובדרך כלל דורשות אימון מחדש לכל סביבה חדשה.
דרך ביניים בהשראת המוח
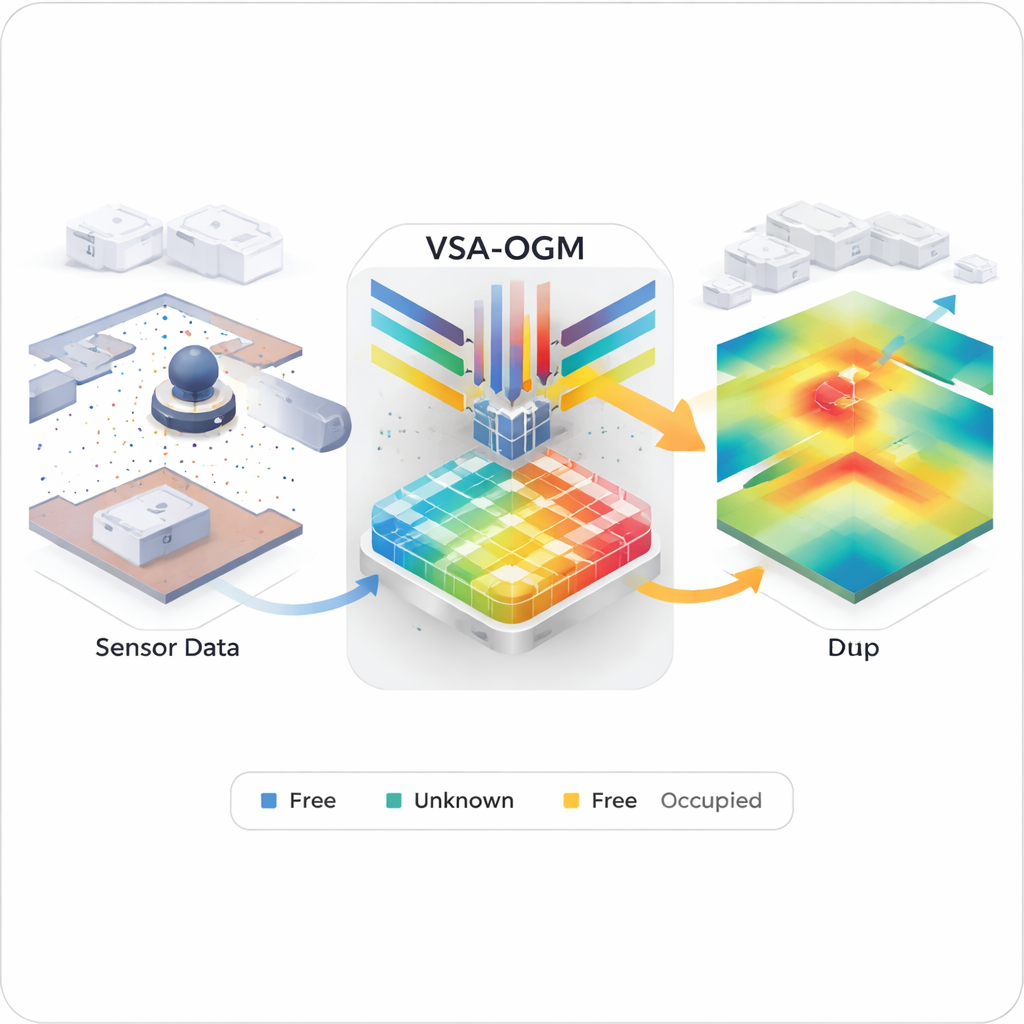
המחברים מציעים פשרה "נוירו־סימבולית" בשם VSA-OGM, קיצור ל־Vector Symbolic Architecture Occupancy Grid Mapping. במקום לאחסן כל פרט ברשת צפופה או לקבור מבנה בתוך מיליוני משקלים של רשת עצבית, השיטה מקודדת קריאות חיישן כווקטורים ארוכים ביותר במרחב מימדיות-גבוהה — רעיון מתמטי בהשראת תיאוריות על אופן שבו קבוצות נוירונים עשויות לייצג מושגים ומיקומים. הסביבה נחלקת לאריחים, ולכל אריח יש זכרונות וקטוריים לראיות "תפוס" ו"ריק". ככל שהרובוט נע ואוסף ענני נקודות, כל תצפית מומרת לאחד מהווקטורים ההיפר־ממדיים האלה ונצברת בזיכרון המתאים של האריח, ובצורה יעילה מצטברת על פני הזמן.
מווקטורים רועשים למפות ברורות
כמובן, הערמה של אותות רבים לזיכרון היפר־ממדי אחד עלולה ליצור גוש רועש וקשה לפיענוח. VSA-OGM מתמודד עם זה באמצעות צינור פענוח מתוכנן בקפידה. ראשית, הוא משווה את זיכרונות האריחים לווקטורים המייצגים מיקומים במרחב, ומפיק "קוואזי־הסתברויות" גסות לתפוסה. אז הוא מפעיל סדרת שלבים לא־ליניאריים וכלי תורת המידע — אנטרופיית שאנון — כדי להבחין היכן הנתונים תומכים באופן חזק בשיעור אחד על פני השיעור השני. לבסוף, הוא משתמש בפונקציית סופטמקס להמרת האותות הללו להסתברויות אמיתיות ומשלב אותן למפה סופית המייצגת את ההפרש החתומי בין "תפוס" ל"ריק". התוצאה היא רשת תפוסה חלקה שמבצעת אינטרפולציה על פני אזורים שנמדדו בדלילות, בעוד היא נשארת לחלוטין הסתברותית ופירושית.
מפות מהירות לרובוט אחד — או רבים
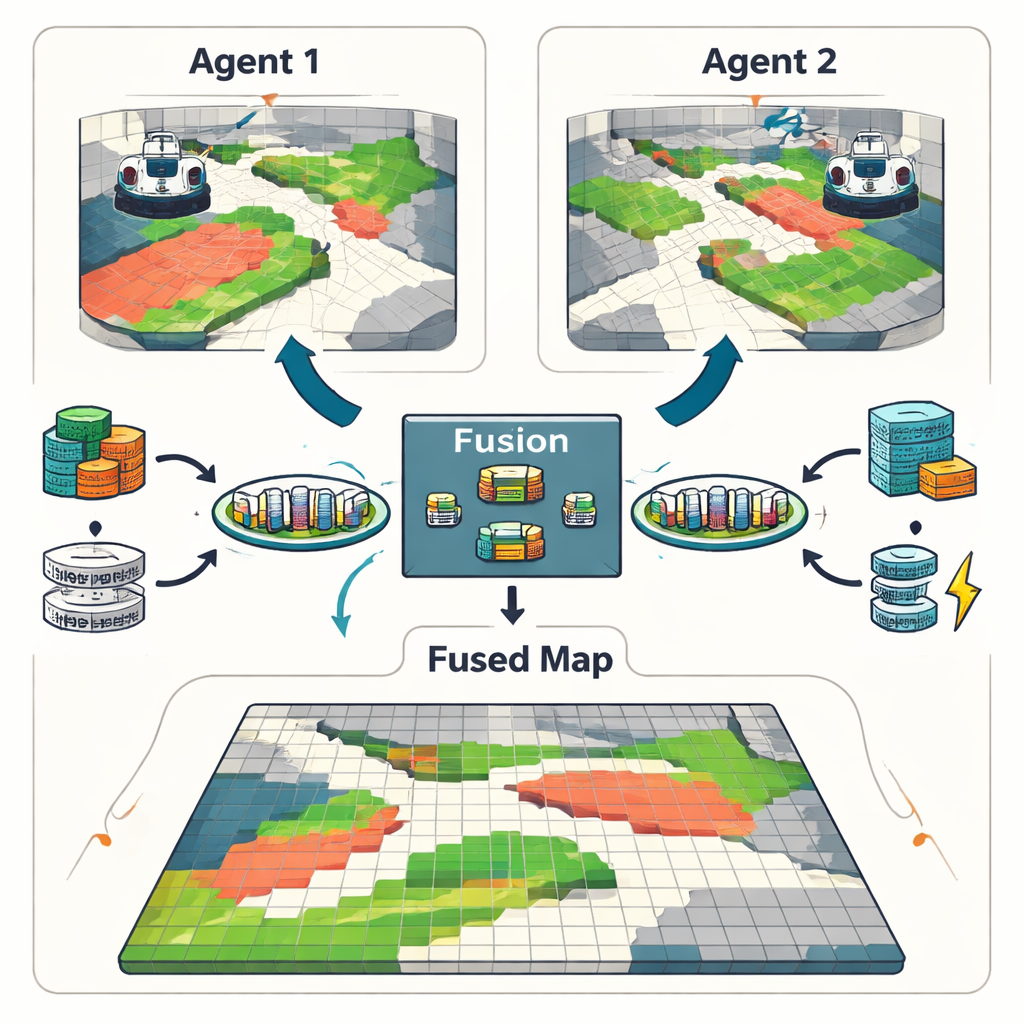
כדי לבדוק את הגישה שלהם, החוקרים הריצו את VSA-OGM על מספר מערכי נתונים מדומים ומציאותיים, כולל מפת רובוט מקורה קלאסית ותרחיש נהיגה בקנה מידה גדול. מול שיטות מסורתיות חזקות שמדגמנות במתכוון קורלציות מרחביות, VSA-OGM השיגה דיוק מיפוי דומה אך השתמשה בכ־400 פעמים פחות זיכרון ופעלה עד 45 פעמים מהר יותר. בהשוואה לשיטות מסורתיות מקוצצות שמורידות חלק מהפרטים הסטטיסטיים, היא עדיין השוותה דיוק תוך קיצוץ השהייה בכמעט פקטור חמש. כאשר הוערכה מול מערכת רשת־עצבית שדורשת שעות של אימון ומיליוני פרמטרים, VSA-OGM סיפקה איכות מיפוי דומה ללא צורך באימון מוקדם והקטינה את זמן העיבוד לפריים עד פי שישה. המסגרת גם תומכת במספר רובוטים: זכרונות וקטוריים מסוכנים שונים של סוכנים שונים ניתנים פשוט לחיבור יחדיו, ויוצרים מפות מאוחדות עם מעט אובדן מידע.
מה זה משמעותי לרובוטים יומיומיים
במילים פשוטות, עבודה זו מראה שלרובוטים לא חייבים לבחור בין מתמטיקה איטית־אך־אמינה לרשתות עצביות מהירות־אך־אטומות כאשר הם בונים מפות של העולם. באמצעות וקטורים בהשראת המוח ובעלי מימדיות גבוהה, VSA-OGM שומרת על המבנה ההסתברותי הברור של השיטות הקלאסיות תוך השגת המהירות והיעילות הדרושות להפעלה בזמן אמת על חומרה מוגבלת. עדיין יש אתגרים — כגון טיפול בנתונים מאוד לא אחידים וסביבות צפופות מאוד — אך הגישה מצביעה לכיוון של רובוטים עתידיים שיוכלו להבין את סביבתם בבטחה ובמהימנות, אפילו כשהם פועלים על מחשבים צמודי־לוח צנועים.
ציטוט: Snyder, S., Capodieci, A., Gorsich, D. et al. Brain Inspired Probabilistic Occupancy Grid Mapping with Vector Symbolic Architectures. npj Unconv. Comput. 3, 13 (2026). https://doi.org/10.1038/s44335-026-00052-w
מילות מפתח: מיפוי רשת תפוסה, רובוטים אוטונומיים, אדריכלוּת סמלים וקטורית, מיפוי הסתברותי, חיישני LiDAR