Clear Sky Science · he
ראיות התנהגותיות לביצוע היררכי של תנועות עוקבות
איך המוח שלנו מהפך תנועות פשוטות לפעולות חלקות
משימות יומיומיות כמו הקלדה במקלדת, נגינת סולם בפסנתר או הושטת יד לפריטים על השולחן מרגישות קלות. מאחורי הקלעים, המוח צריך לקשר יחד רבות מתנועות קטנות כדי ליצור פעולות מתואמות וחלקות. המחקר הזה שואל שאלה שנראית פשוטה אך מעמיקה: האם המוח תמיד מתכנן שרשרות פעולה כאלה כתרגיל אחד ארוך, או שהוא בונה אותן שלב אחר שלב, באמצעות היררכיה נסתרת של יחידות קטנות יותר?
מושיטים אל מטרות גדולות על השולחן
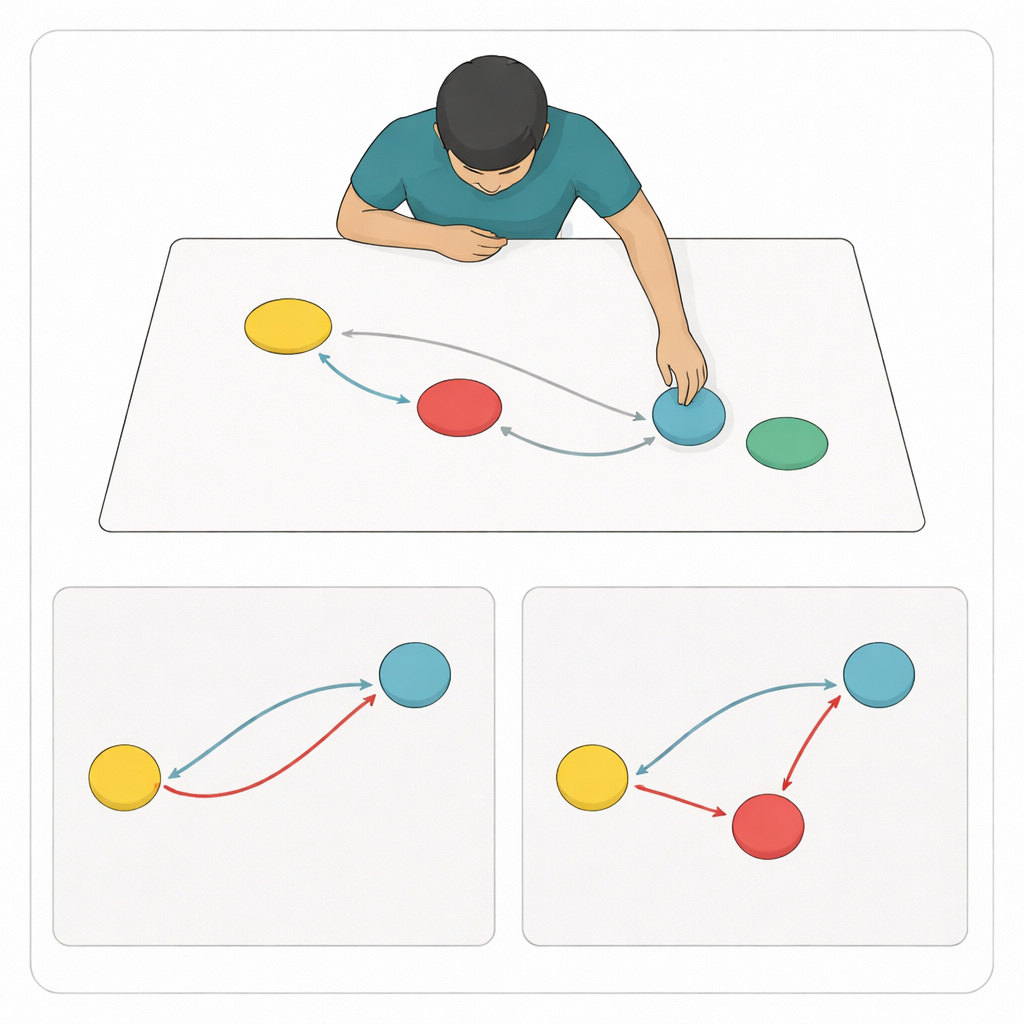
כדי לחקור זאת, החוקרים תכננו משחק שולחני של "חבר את הנקודות" עבור היד. עשרים מתנדבים ישבו ליד שולחן שעל פניו הודפסו כמה מעגלים צבעוניים גדולים. מעגל התחלתי עמד קרוב לגוף, ושאר המעגלים הונחו משמאל, מימין ומעל. בכל ניסוי, המשתתפים שמעו צליל והיו צריכים להזיז את קצה האצבע המורה מהמעגל ההתחלתי דרך רצף קצר של מטרות ולחזור שוב, כמה שיותר מהר אך ללא צורך בדיוק קיצוני: מספיק היה שקצה האצבע ינחת בכל מקום בתוך כל מעגל. תנאי הדיוק הנמוך הזה עידד אנשים לנוע במהירות ובחלקות, כך שהמסלולים יתעקלו ויתמזגו בין המטרות במקום לעצור בחדות בכל אחת מהן.
לקרוא תוכניות נסתרות מתוך העיקולים של היד
במקום למדוד כמה זמן לקח לאנשים או כמה טעויות הם עשו, הצוות התמקד בצורת המסלול המדויקת של קצה האצבע. הם בחנו שני מאפיינים מרכזיים. ראשית, "עיקום באמצע הדרך": עד כמה המסלול למטרה סוטה לעבר המטרה הבאה לפני שהוא מגיע אליה בפועל. שנית, "הסתובבות סביב מטרה": כמה חד או חלק הקימור של המסלול כשהוא עובר קרוב למטרה ומשנה כיוון. יחד, דפוסים אלה מגלים האם התנועה אל מטרה כבר לוקחת בחשבון את המטרה הבאה — אפקט שנקרא "קוארטיקולציה" (coarticulation), בדומה לאופן שבו הפה מעצב צלילים עתידיים בזמן דיבור. המדענים השוו את העיקולים הנמדדים למסלולים שיצרו שני מודלים ממוחשבים של תכנון תנועה, שניהם מבוססי תיאוריות מבוססות של בקרת מיטביות אך שונים במבנה הפנימי שלהם.
תכניות שטוחות מול תכניות רב-שכבתיות
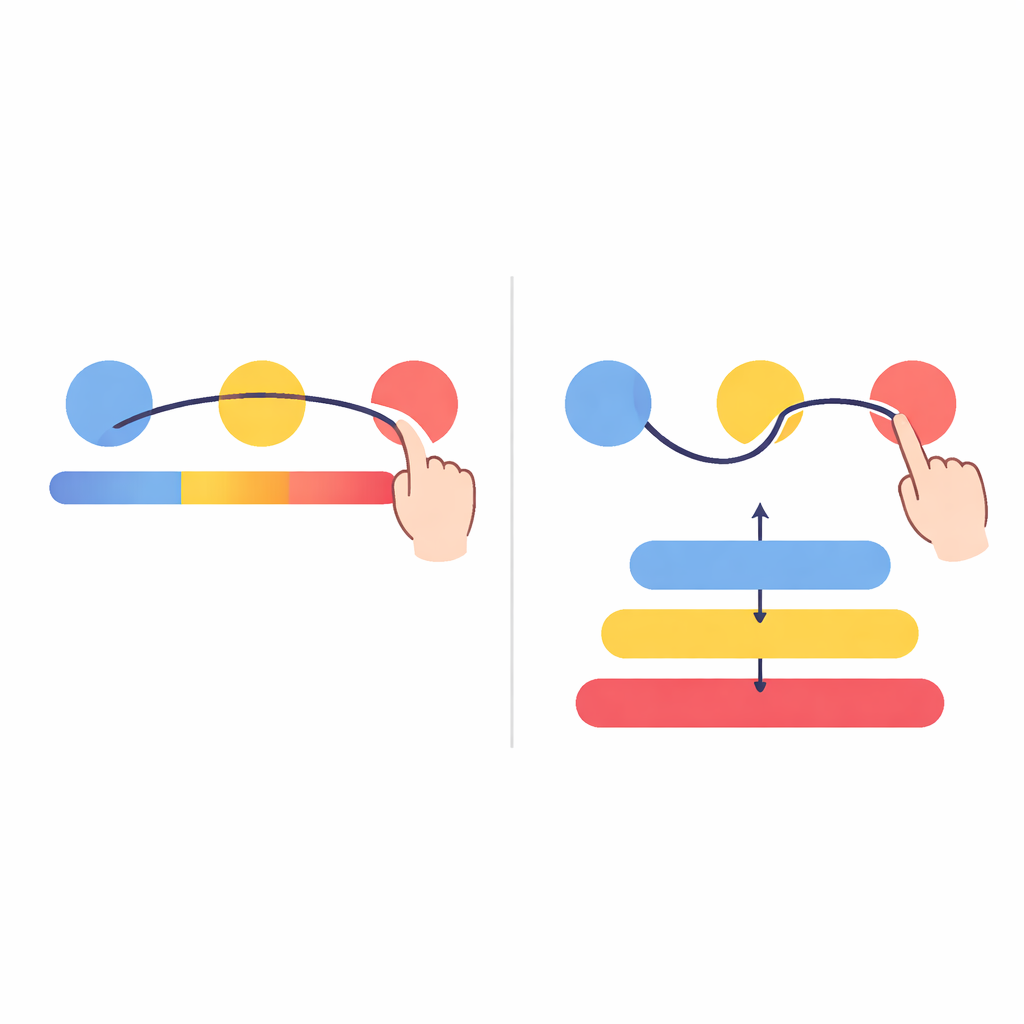
ב"מודל השטוח" מדמיינים שהמוח מתכנן את כל רצף של שלוש המטרות כמסלול אחיד ומשולב אחד לפני שהיד מתחילה לנוע. זה דומה למחווה שזוכרים בשלמותה או "חבילה" שמבוצעת בבת אחת. במקרה כזה, עיקום באמצע הדרך והסתובבות סביב המטרות נקשרים זה לזה באופן הדוק: ברגע המתכנן מחליט עד כמה לנטות אל המטרה הראשונה, הוא ברובו קובע כיצד ייראו העיקולים לאורך כל הרצף. ה"היררכי", לעומת זאת, מוסיף שכבה ביניים פשוטה שמחברת יחד חתיכות קטנות יותר — כגון תנועה של שתי מטרות ואחריה חזרה אל מטרה אחת — בזמן אמת. מערכת דינמית נפרדת מחליטה מתי לעבור מתת-תנועה אחת לאחרת, מה שמאפשר לכוון את הצורה סביב כל מטרה באופן יחסית עצמאי תוך שמירה על ממשק חלק בין התנועות הכוללות.
התנהגות שנראית היררכית
כאשר החוקרים הריצו סימולציות רבות, הם מצאו שהמודל השטוח פשוט לא יכול ליצור כמה שילובים של עיקום באמצע הדרך והסתובבות שהם טבעיים אצל המשתתפים האנושיים. במיוחד, אנשים לעתים קרובות הראו עיקום חזק לעבר המטרה השנייה בחלק הראשון של התנועה, ועדיין ביצעו סיבוב חד או שונה בצורתו סביב אותה מטרה שנייה — דפוסים שהמתכנן השטוח לא הצליח להתאים. המודל ההיררכי, לעומת זאת, הצליח לשחזר התנהגויות מעורבות כאלה על ידי חיבור דינמי של "תת-תנועות" נפרדות בנקודות ביניים. בהשוואת הנתונים האמיתיים לשני המודלים, הממצאים הראו שכמעט חצי מכל הרצפים שנרשמו דרשו בבירור הסבר היררכי, בעוד שאחרים היו תואמים לתכנון שטוח, מה שמרמז שאנשים מתחלפים בגמישות בין אסטרטגיות בהתאם לרצף.
מה משמעות הדבר לכישורים היומיומיים
הממצאים מעידים שגם ללא אימון ארוך או שגרות מיומנות מאוד מתורגלות, המוחות שלנו לעתים קרובות מסתמכים על תכניות רב-שכבתיות כאשר הם מקשרים יחד הושטים פשוטים. במקום לדחוס תמיד רצף לתוך חבילה אחת קשיחה, מערכת התנועה נראית כאילו שומרת חלקי תנועה שניתנים לשימוש חוזר ומקשרת ביניהם בזמן אמת. עם אימון, שרשראות כאלה עשויות להתרוקן בהדרגה למעין פעולות שטוחות ומלאות "חבילה", מה שעוזר להסביר כיצד מיומנויות הופכות מהירות ואוטומטיות. עבודה זו מספקת חלון חדש המבוסס על גיאומטריה להבנת האופן שבו המוח מארגן תנועה, ושיוכל להנחות מחקרים עתידיים על רכישת תנועה, שיקום ותכנון רובוטים שנעים בחן מותאם דומה.
ציטוט: Cuevas Rivera, D., Kiebel, S.J. Behavioral evidence for the hierarchical execution of sequential movements. Commun Psychol 4, 52 (2026). https://doi.org/10.1038/s44271-026-00436-5
מילות מפתח: בקרת תנועה, תכנון תנועה, חבילה (chunking), התנהגות היררכית, הישג רציף