Clear Sky Science · he
אחיזה מבוססת שבירה: פגיעה דינמית מאפשרת עיגון רובוטי צפוי לקרח מתוקים
לטפס במקום שבו הכבידה כמעט איננה
דמיינו מנסים לטפס על צוק קפוא שבו הכבידה כל כך חלשה שמשקלכם עצמו אינו מסייע לנעיצת הבוטים. זו המאתגרת שעומדת בפני רובוטים עתידיים שישלחו לירחים קפואים כמו אנקלדוס של שבתאי, שם המדענים מקווים לחפש סימנים לחיים בוונטות ותיוחי־קרח עמוקים. המאמר מתאר דרך חדשה לגרימת רובוטים להתעגן בקרח באמצעות מכות מהירות בדומה לפטיש ולחיצה חזקה, בהשראת גרזני הקרח של מטפסים. התוצאה היא מערכת עיגון קלה שמשתמשת בכוח ובאנרגיה הרבה פחותים מאשר ברגים לקרח או רצחנים מחוממים קיימים, מה שעשוי להפוך עולמות קפואים שבעבר היו בלתי נגישים לפחות נגישים.

מדוע קשה להיאחז בקרח
על פני כדור הארץ מטפס יכול להישען על משקלו המלא כדי לדחוף בורג קרח או גרזן כנגד המשטח ולהיתפס. באנקלדוס, הכבידה היא רק כ־1% מזו של כדור הארץ, כך שרובוט לא יכול לסמוך על משקלו כדי להניע כלים אל תוך הקרח. האפשרויות הקיימות טומנות בחובן חסרונות משמעותיים. ברגי קרח דורשים כוחות דחיפה גדולים כדי להתחיל לחתור לתוך המשטח — כל כך גדולים שבראנקלדוס רובוט יצטרך לשקול כמו רכב מרס גדול כדי להשתמש בהם ביעילות. 'פיקים' תרמיים מחוממים יכולים להינעם למקומם עם דחיפה מועטה מאוד, אך הם צורכים כמויות עצומות של אנרגיה בכל שימוש, מגבלה רצינית לכלי טיס שפועלים רחוק מהשמש. במקביל, רובוטי טיפוס מודרניים רבים מסתמכים על תכונות סלע גסות, יניקה או דבקים מיוחדים, שכל אלה מתקשים מול הצורות החלקות אך הגליות של קרח קרחוני טבעי.
לשאוב טריק ממטפסי קרח אנושיים
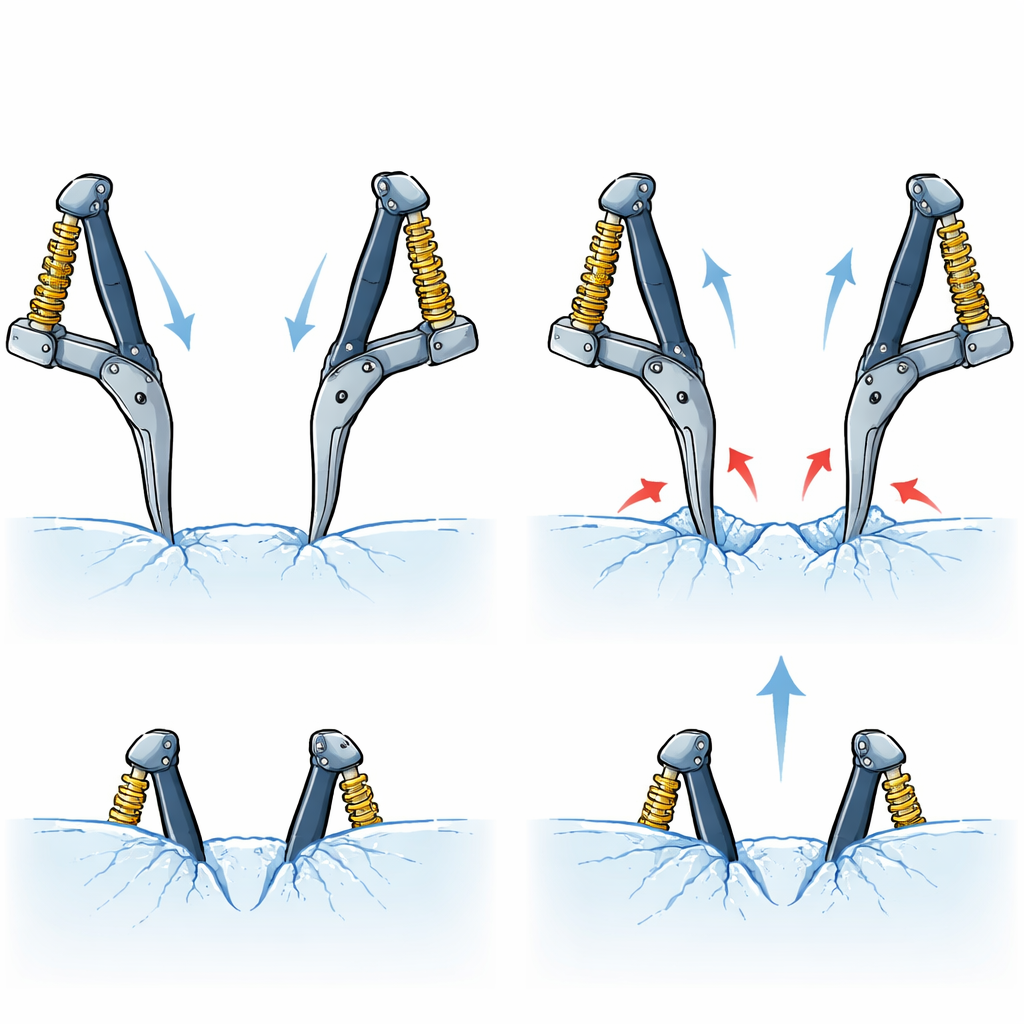
המחברים מציעים אסטרטגיה שונה: במקום להסתגל למשטח הקרח, ליצור נקודות אחיזה משלכם. המכשיר שלהם משתמש בשני גרזנים קטנים המותקנים על אוחז קומפקטי. תחילה, קפיצים בתוך הזרועות מתוחזקים, מאחסנים כמות מתונה של אנרגיה מכנית. כשמשחררים אותם, הגרזנים מתנדנדים כפטישים זעירים ופוגעים בקרח, חורצים גומות קטנות. לאחר מכן, אותו מנגנון סוגר את הגרזנים זה אל זה כך שקצותיהם מתעקלות לתוך החריצים החדשים. תהליך דו־שלבי זה — פגיעה ואז אחיזה — הופך פלח חלק של קרח למשהו שהרובוט יכול להיאחז בו, וניתן להפוך אותו בקלות כדי שהרובוט יוכל לבצע "צעד" נוסף. כל המחזור מופעל על ידי מנוע יחיד שמטען גם את הקפיצים וגם מהדק את האחיזה.
בדיקת הפיזיקה מאחורי האחיזה
כדי לוודא שהגישה תעבוד בעקביות, הצוות בנה מודלים מתמטיים של כמה עמוק ייכנסו קצות הגרזן וכמה יתכן שיקפצו חזרה לאחר הפגיעה. הם לאחר מכן בדקו גרזן אחד המתנדנד כמחוג לתוך גושי קרח מתוק מקוררים לטמפרטורות טיפוס קרחוני טיפוסיות. על ידי השוואת התיאוריה והניסוי, הם מצאו שהמודלים שלהם יכולים לחזות כמה עמוק תיווצר גומה ולהעריך את אנרגיית ה'ריקויל' כשגרזן קופץ חזרה. באמצעות תוצאות אלה חשבו כמה חזק הרובוט צריך לדחוף את האוחז אל הקרח לפני התנודה, כדי שהגרזנים יישארו בגומותיהם החדשות במקום לקפוץ החוצה. עבור אנרגיית הקפיץ הנבחרת שלהם, המודל חזה שכ־16 ניוטון של דחיפה — בערך משקל של כמה ליטרים מים על פני כדור הארץ — יספקו הצלחה כמעט ודאית.
משולחן המעבדה אל קיר הקרח
עם המודלים בידם, החוקרים ניסו את האוחז הכפול־גרזני המלא. במעבדה הם אישרו שמכות עם אנרגיית קפיץ מאוחסנת של 8 ג'אול יכולות ליצור גומות בעומק מספק בעוד שהן צריכות דחיפה התחלתית הרבה פחותה מזו של ברגי קרח והרבה פחות אנרגיה מקפיצי חום. הם מדדו אז כמה חזקה האחיזה הסופית על ידי משיכה ישרה של המכשיר מהמקום על הקרח. על ידי כוונון כמה בחוזקה הגרזנים מתקרבים זה לזה, הם גילו שתי דרכים שבהן האחיזה יכולה להיכשל: בדחיסה נמוכה הקצוות החלקו החוצה מתוך הגומות; בדחיסה גבוהה מאוד, המדפים הקרחיים עצמם נשברים ונופלים. בין הקצוות הללו נמצא איזור מתאים שבו האוחז יכול לשאת יותר מפעמיים ממשקלו שלו. ניסויים שטחיים על קרחון בצרפת הראו שהמכשיר יכול לעגן על קרח טבעי תלול, שלג דחוס ואפילו גזעי עצים, סלעים וקרקע דחוסה, ואישרו שהשיטה של פגיעה ואז אחיזה עובדת גם מחוץ למעבדה.
מה המשמעות לכך עבור חוקרים עתידיים
המחקר מראה ששבירה ונעיצה לתוך הקרח יכולה להיות דרך יעילה מאוד עבור רובוטים לטפס ולהחזיק מעמד בסביבות קשות ודלות כבידה. על ידי ניצול העובדה ששבירת הקרח צורכת הרבה פחות אנרגיה מהיתוך שלו, האוחז הכפול־גרזני יוצר עוגנים חזקים וניתנים להפיכה בעזרת כוחות מתונים ורק מספר ג'אולים של אנרגיה לכל צעד. למשימות לאנקלדוס או עולמות קפואים אחרים, מערכת כזו יכולה לאפשר לרובוטים קטנים בעלי מגבלות אנרגיה לרדת בבטחה לוונטות או להיתלות על קירות הצוקים בזמן דגימה של חומרים שעשויים לחשוף האם יש חיים מעבר לכדור הארץ. אותה רעיון יכול גם לסייע לרובוטים על פני כדור הארץ לחקור קרחונים, מערות קרח ופני סלע פריכים שמסוכנים או בלתי נגישים למטפסים אנושיים.
ציטוט: Galassi, A., Trebi-Ollennu, A., Papadopoulos, P. et al. Fracture-based grasping: dynamic impact enables predictable robotic anchoring to freshwater ice. npj Robot 4, 22 (2026). https://doi.org/10.1038/s44182-026-00085-0
מילות מפתח: טיפוס קרח רובוטי, חקירת כוכבים, מפצחני רובוט, עיגון שבירת הקרח, משימות לאנקלדוס