Clear Sky Science · he
תכנון מסלולים למספר סוכנים המאפשר מהלכים קינודינמיים תוקפניים
רובוטים שיכולים לרקוד בין פקקי תנועה
דמיינו עשרות רובוטים מעופפים וגלגליים זורמים במרץ במחסן, לעולם לא מתנגשים זה בזה ומסיימים את המשימות שלהם מהר יותר מנהגים אנושיים. מאמר זה מתאר שיטה חדשה לתזמור "התנועה" של רובוטים כאלה, כך שרבים מהמכונות יוכלו לנוע באופן תוקפני ומהיר במרחבים צרים ועדיין להישאר בטוחים. העבודה חשובה כי רעיונות דומים עשויים יום אחד להניע צי רובוטים במפעלים, במחסנים ובשירותי משלוח העובדים ללא הפסקה בסביבה יומיומית.
למה לנהל הרבה רובוטים כל כך קשה
תיאום קהל של רובוטים קשה בהרבה מניווט של יחיד. כל רובוט צריך להגיע מנקודת ההתחלה ליעדו מבלי להתנגש, לחסום אחרים או להיתקע בלופים אינסופיים. הגישות הקיימות נוטות לנוע בין שני קצוות. שיטות מסוימות מטפלות ברובוטים כמו חלקי משחק על גריד, מה שהופך תכנון עבור מאות מהם למהיר ומתמטי—אבל הנתיבים הנובעים מהן לעתים קרובות מתעלמים מאופן התנועה האמיתי של מכונות, מאצתן או מפניותיהן. שיטות אחרות מדמות תנועה פיזיקלית מלאה ומייצרות מסלולים חלקים ומרהיבים, אך הן הופכות לאיטיות באופן כואב או בלתי מהימנות כשהמספר של הרובוטים עולה מעבר למספר מצומצם.
דרך אמצע: תכנון "קונקרטי"
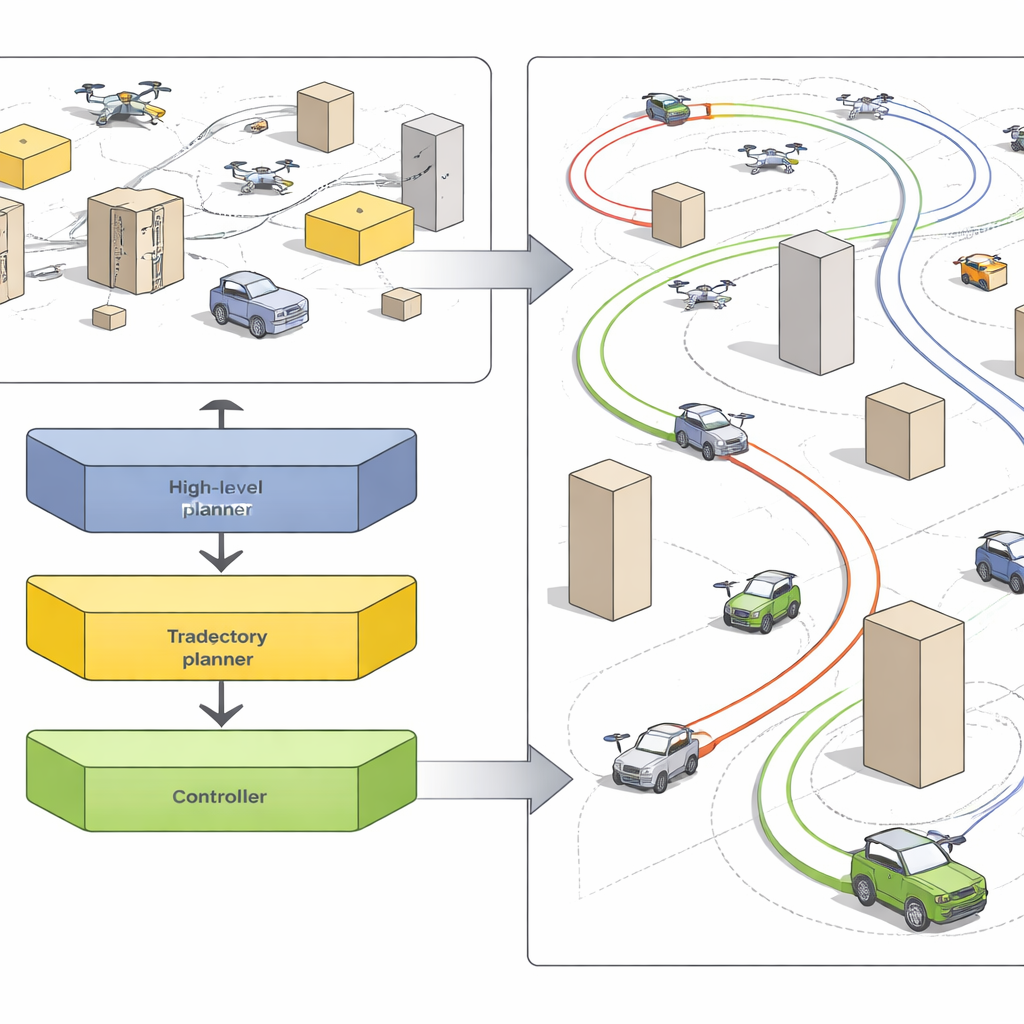
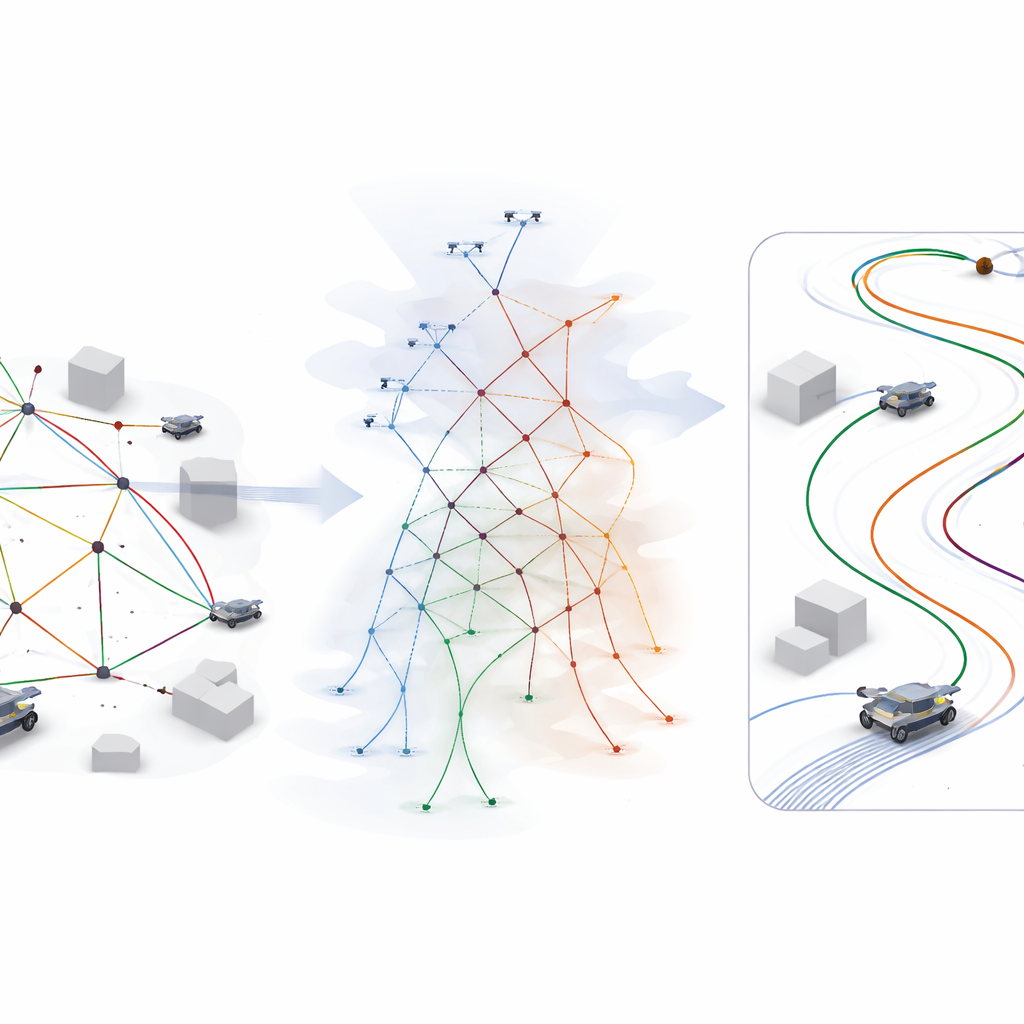
המחברים מציעים אסטרטגיה היברידית שהם קוראים לה תכנון מסלולים רב-סוכני "קונקרטי". הרעיון הוא לשלב את המבנה המדויק של תכנון בסגנון גריד עם תמונה מציאותית של אופן תנועת הרובוטים. במקום לעבוד רק בגריד אבסטרקטי או בפיזיקה רציפה מלאה, המערכת משתמשת בתיאור שכבות של תנועה. מתכנן מרכזי מחפש על פני קבוצת מהלכים בדידה של כל הרובוטים בבת אחת, אך כל מהלך מועשר בתחזיות לגבי כמה זמן ייקח, כיצד הרובוט עשוי לסטות מהקו המיועד ול 얼마나 הוא יכול לעבור בבטחה ליד אחרים. תחזיות אלו נובעות ממודלים מונחי-נתונים שאומנו על ניסויים עם רובוטים אמיתיים, כך שהמתכנן "יודע" כיצד הצי שלו נוהג בפועל.
מתחבל סרק אל תנועה מדויקת
ברגע שהמתכנן המשולב יצר רצפי נקודות מעבר בטוחים וללא קונפליקטים לכל רובוט, המסגרת מתמקדת לפרטים. מודול שני הופך כל שביל גס למסלול צפוף וחלק שמכבד מגבלות על דחף, היגוי וגורמים פיזיים אחרים. כדי לעשות זאת במהירות, המחברים השתמשו תחילה באופטימיזציה נומרית כבדה מחוץ לזמן ריצה כדי לייצר דוגמאות רבות של תנועה קרובה לאופטימלית בזמן, ואז אימנו רשתות נוירונים מבוססות טרנספורמר לחקות את הדוגמאות הללו. בזמן ריצה, רשתות אלה יכולות להפיק מסלולים איכותיים בפחות ממילישנייה. שכבה שלישית, בקר תחזית מודל עם מסנן בטיחות, מתאימה באופן מתמיד את הפקדים כדי לעקוב אחרי ההפניות האלה ומשתמשת בחישה מקומית כדי להתחמק מהפתעות, כמו מכשול נודד או טעות מעקב קלה.
מבחן עם ארבעים רובוטים
הצוות הדגים את המערכת שלהם עם צי מעורב של 20 רחפני קוואד-רוטור, 8 רובוטים קרקעיים ו-12 רובוטים שפעלו כמכשולים נעים, כולם פועלים יחד בזירה מקורה בגודל חדר. בקבוצת ניסויים אחת, עדרי רחפנים התחרו במרחבים סגורים במהירויות שיא מעל חמישה מטר לשנייה תוך הימנעות זה מזה בסוג של בלט תלת־ממדי. בניסוי אחר, רובוטים קרקעיים חצו שוב ושוב אזור עמוס עם מכשולים נעים אקראית, והשלים יותר משימות, עם פחות עצירות וללא התנגשויות, בהשוואה לשיטות מתחרות. הניסויים התובעניים ביותר כללו את כל 40 הרובוטים שביצעו מספר משימות ברצף, כשהמערכת מתכננת מחדש מסלולים על פי דרישה ללא מחשקי מוות או התנגשויות.
רמזים למערכות משלוחים ומחסנים עתידיות
כדי להמחיש כיצד זה יכול להתורגם למשימות בעולם האמיתי, המחברים הציגו משלוחי "המייל האחרון" מדומים ופעולות מחסן. בתרחיש המשלוחים, רובוטים קרקעיים נשאו רחפנים אל "שפת הנהר", שם הרחפנים המריאו, טסו לנקודות הורדה מפוזרות, שבו לבסיסים הניידים שלהם ואז חזרו לאזור ההתחלה—כל זאת תוך הימנעות ממכשולים נעים. במוצר המחסן המדומה, צוותי רחפנים העבירו שוב ושוב חבילות וירטואליות בין מדפים ואזורי משלוח, תוך שמירה על תנועה צפופה, זריזה ותפוקה גבוהה. מקרים אלו דרשו רק כוונון מינורי של המסגרת, מה שמדגיש את יכולתה להסתגל לפלטפורמות ולמשימות חדשות.
מה המשמעות מכאן והלאה
במילים פשוטות, עבודה זו מראה שאפשר לשלב צוותים גדולים של רובוטים לנוע גם באומץ וגם בבטחה במרחבים צרים ומשתנים על ידי שילוב זהיר של תכנון מהיר ברמה גבוהה, מודלים תנועתיים ריאליסטיים ובדיקות בטיחות כשורה אחרונה. הגישה "הקונקרטית" הופכת תוכניות אבסטרקטיות לתנועות שמכונות אמיתיות יכולות לבצע במהירות, תוך מתן ערבויות נגד התנגשויות ומצבים של חסימה ברבים מהסביבות הפרקטיות. אף על פי שסביבות כאוטיות ביותר ומרחבים בלתי ידועים לחלוטין נותרו אתגר, המסגרת מצביעה לעבר עתיד שבו צי של רחפני משלוח, עוברי מחסנים ועובדי רובוטיקה אחרים יוכלו לשתף בסביבות צפופות בלי השגחה אנושית מתמדת.
ציטוט: Okumura, K., Yang, G., Gao, Z. et al. Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers. npj Robot 4, 20 (2026). https://doi.org/10.1038/s44182-026-00083-2
מילות מפתח: תיאום רב-רובוטי, תכנון מסלולים, עדרי רובוטים, אוטומציה במחסנים, משלוחי רחפנים