Clear Sky Science · he
כל העיניים, בלי IMU: למידת נטיית הטיסה מתוך הראיה בלבד
לראות כמו חרק
רובוטים מעופפים קטנים לרוב נשענים על חיישני תנועה זעירים כדי לשמור על יציבותם, משהו כמו אוזן פנימית למכונות. אך חרקים מנהלים טיסה זריזה עם חומרה פשוטה בהרבה, כשהם סומכים במידה רבה על מה שהם רואים. המחקר הזה מראה שרחפן יכול לעשות דבר דומה: לעוף באופן יציב באמצעות סוג מיוחד של מצלמה ומוח מלאכותי קומפקטי, בלי חיישני תנועה רגילים. המעבר הזה יכול להפוך רחפונים בגודל כף יד ובקנה מידה של חרקים לקלים יותר, זולים יותר ועמידים יותר.
למה להיפטר מהחיישנים הרגילים?
בקרת נטייה — שמירה על נטיית הרחפן ביחס לכבידה — מטופלת בדרך כלל על ידי יחידת חישה שמודדת תאוצה וסיבוב. חיישני אינרציה אלה עובדים היטב, אך הם מוסיפים משקל, צורכים אנרגיה ויכולים להיות נקודת כשל יחידה. לעומת זאת, חוקרי מעופפים רבים אצל חרקים אינם מחזיקים חיישן כבידה ייעודי, אלא מפיקים רמזים על הנטייה מתוך הדרך שבה העולם נע על פני העיניים שלהם. אם רובוטים יוכלו לחקות את הטריק הזה, טייסים זעירים עשויים להזדקק אך ורק לראיה גם לצפייה וגם לאיזון, מה שיפשט את העיצוב ויקל על הקטנתם אל גודל חרק.
מצלמה שרואה רק שינוי
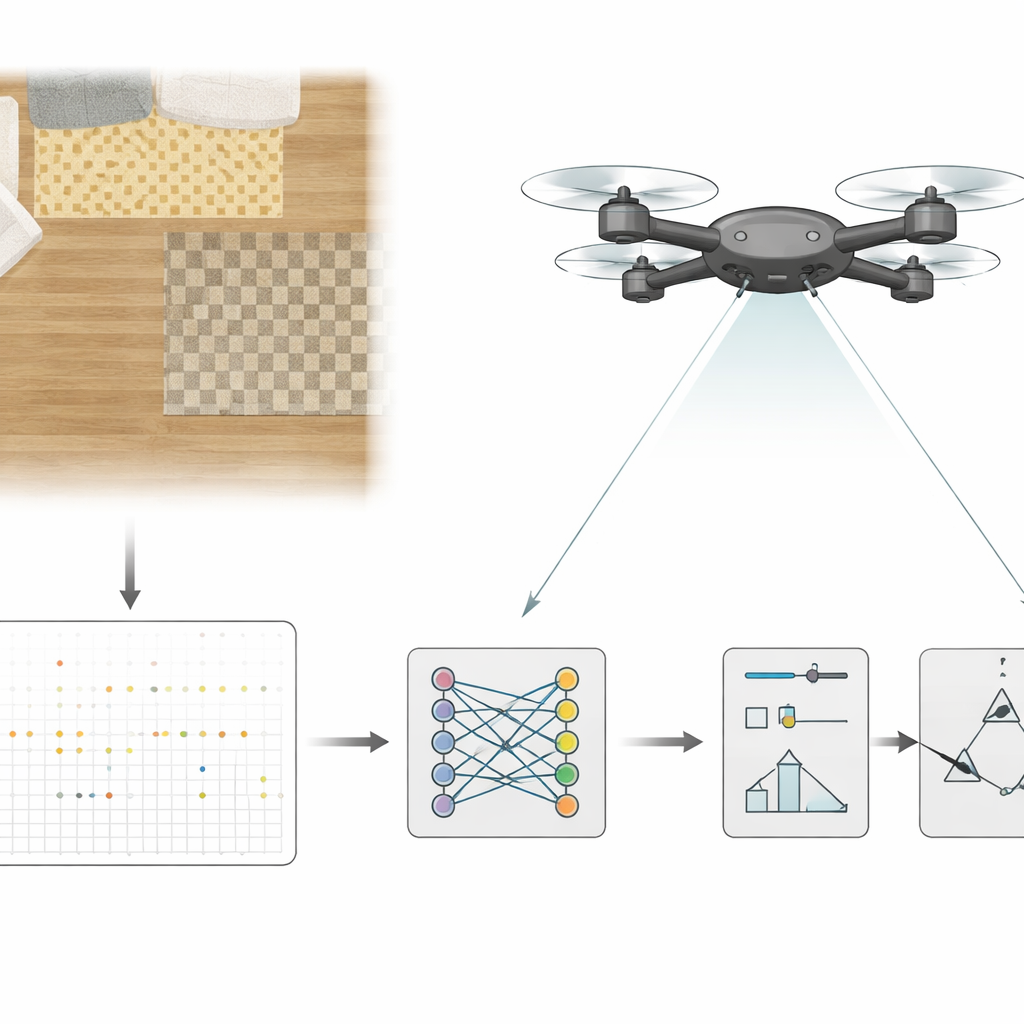
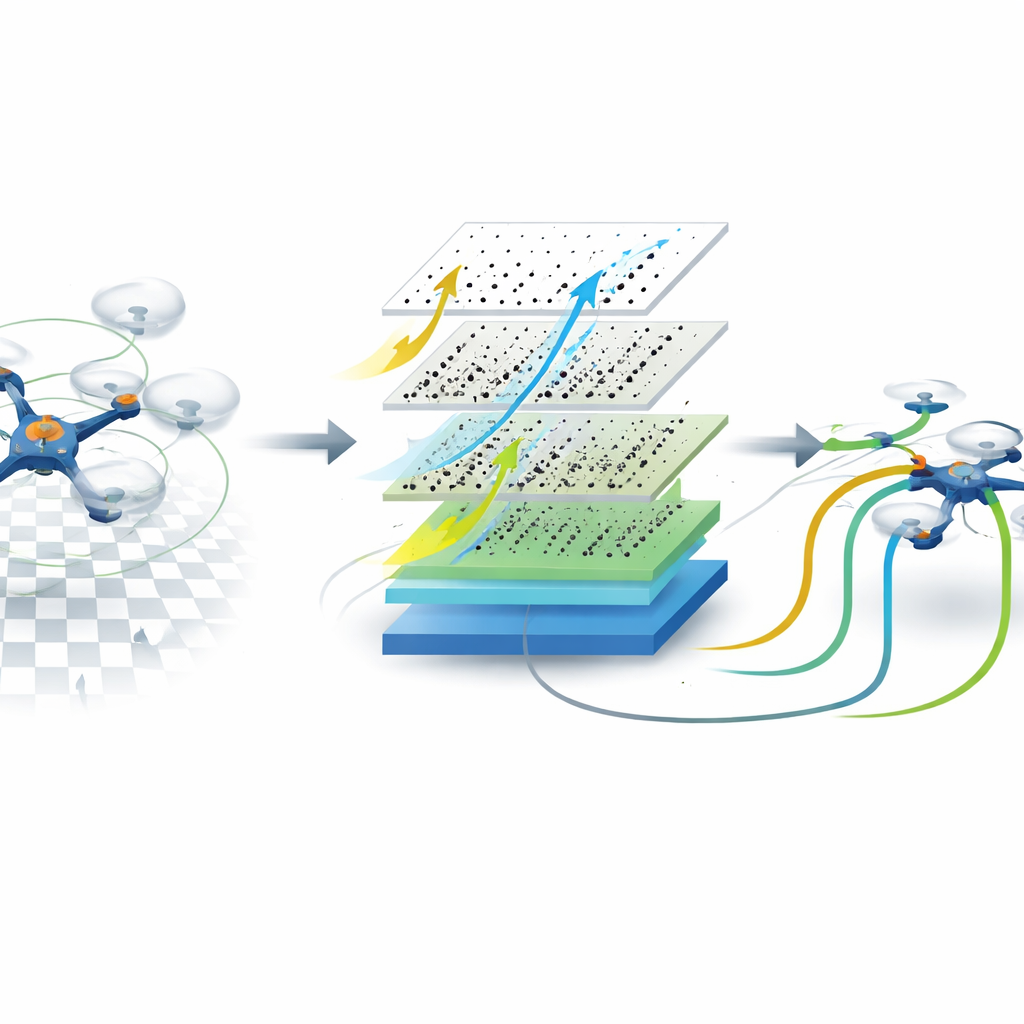
במקום מצלמת וידאו סטנדרטית, החוקרים משתמשים במצלמת אירועים שממוקדת כלפי מטה מהרב-כנף. במקום לשלוח תמונות מלאות במרווחי זמן קבועים, החיישן הזה מדווח רק על שינויים זעירים בבהירות בכל פיקסל, ובקצב מאוד גבוה. זרם האירועים נארז לפרוסות קצרות, כל אחת מכסה רק חמש אלפיות השנייה, והפרוסות האלה מוזנות לרשת עצבית קונבולוציונית חוזרת קטנה הרצה על שבב גרפי על המטוס. עם הזמן הלמידה מאפשרת לרשת להמיר תבניות של שינוי חזותי לאומדני הנטייה ולמהירות הסיבוב של הרחפן, ובכך מחליפה בפועל את יחידת התנועה המסורתית בלולאת הבקרה.
לימוד רחפן לשמור על שיווי משקל בעזרת ראיה בלבד
כדי לאמן את המוח המלאכותי הזה, הצוות טס תחילה את הרב-כנף שלהם באולם פנימי בעודו עדיין משתמש בערכת חיישנים קונבנציונלית. במהלך הטיסות הקליטו את זרם האירועים מהמצלמה יחד עם ערכי הנטייה והסיבוב שהוערכו על ידי הבקר הסטנדרטי. לאחר מכן אימנו את הרשת בהשגחה לשחזר את הערכים האלה מהנתונים הוויזואליים בלבד. במבחנים מאוחרים תפקידי השליטה הוחלפו: הרחפן טס כשהערכת הרשת סוגרת את הלולאה, בעוד שמדידות חיצוניות של תנועת תנועה או מדידות על-גבי הכלי שימשו רק כדי למדוד עד כמה הוא מצליח. המערכת שמרה על הרחפן מרחף ועקב אחרי מסלולי פיקוד לדקות ארוכות, עם מרבית שגיאות הנטייה בתוך כמה דרגות ושגיאות סיבוב בטווחים מתונים, המספיקים לטיסה יציבה.
מעמיקים בכישרון הוויזואלי שנלמד
החוקרים בדקו מה גורם לבקרת ראיה-בלבד זו לעבוד הכי טוב. הם השוו עיצובים שונים של רשת, הוסיפו או הסירו קלטים נוספים כגון מהירויות מנועים או אותות גירו, ושינו כמה משדה הראיה של המצלמה נעשה שימוש. רשתות עם זיכרון — המסוגלות לאינטגרציה של מידע חזותי לאורך זמן — היו קריטיות למעקב מדויק אחרי סיבובים מהירים, בעוד שגרסאות ללא זיכרון התקשו. שדה ראיה רחב, שחשף רמזים כגון אופק במרחק בקצוות התמונה, נתן את השגיאות הגולמיות הנמוכות ביותר בסצנות מוכרות. באופן מפתיע, עם זאת, אילוץ הרשת להסתכל רק על החלק המרכזי של התמונה, שבו רמזים סטטיים כאלה חסרים, גרם לה להסתמך יותר על דפוסי תנועה במקום על מראה הסצנה. למרות שזה הפחית את הדיוק המוחלט, זה שיפר את האופן שבו המערכת הסתגלה באופן חלק כאשר הועברה לסביבות שונות מאוד, מה שמרמז שנוצרה בה תחושת תנועה פנימית.
לקראת רובוטים מעופפים זעירים שמעדיפים ראיה
בסך הכל העבודה מראה שרחפן יכול לשמור על עצמו זקוף ונשלט באמצעות מה שהוא רואה בלבד, בלי חיישן אינרציה בלולאה. בזיווג מצלמת אירועים עם רשת נוירונים קומפקטית, המערכת משיגה את המהירות והתגובתיות הנדרשות לבקרה בזמן אמת תוך הפחתת משקל ומורכבות החומרה. לקוראים כלליים, המסר המרכזי הוא שכוורות עתידיות של רובוטים מעופפים זעירים בדמות חרקים עשויים לאזן ולנווט בעזרת עין חכמה יחידה, בדומה לחרקים, ובכך לפתוח דלת למכונות קלות יותר, חסכוניות יותר באנרגיה ויכולות לחקור באופן בטוח חללים צפופים ובלתי צפויים.
ציטוט: Hagenaars, J.J., Stroobants, S., Bohté, S.M. et al. All eyes, no IMU: learning flight attitude from vision alone. npj Robot 4, 21 (2026). https://doi.org/10.1038/s44182-026-00081-4
מילות מפתח: בקרת טיסה מבוססת ראיה, רחפני מצלמת אירועים, רובוטיקה בהשראת ביולוגיה, בקרים ברשתות נוירונים, כלי טיס זעירים בקנה מידה של חרקים