Clear Sky Science · he
אסטרטגיית פיצוי התנהגותית מסתגלת בהשראת חרקים נגד חסר חוש ריח ללוקליזציית מקור ריח על ידי רובוטים
מדוע איבוד חיישן אינו בהכרח איבוד העקבות
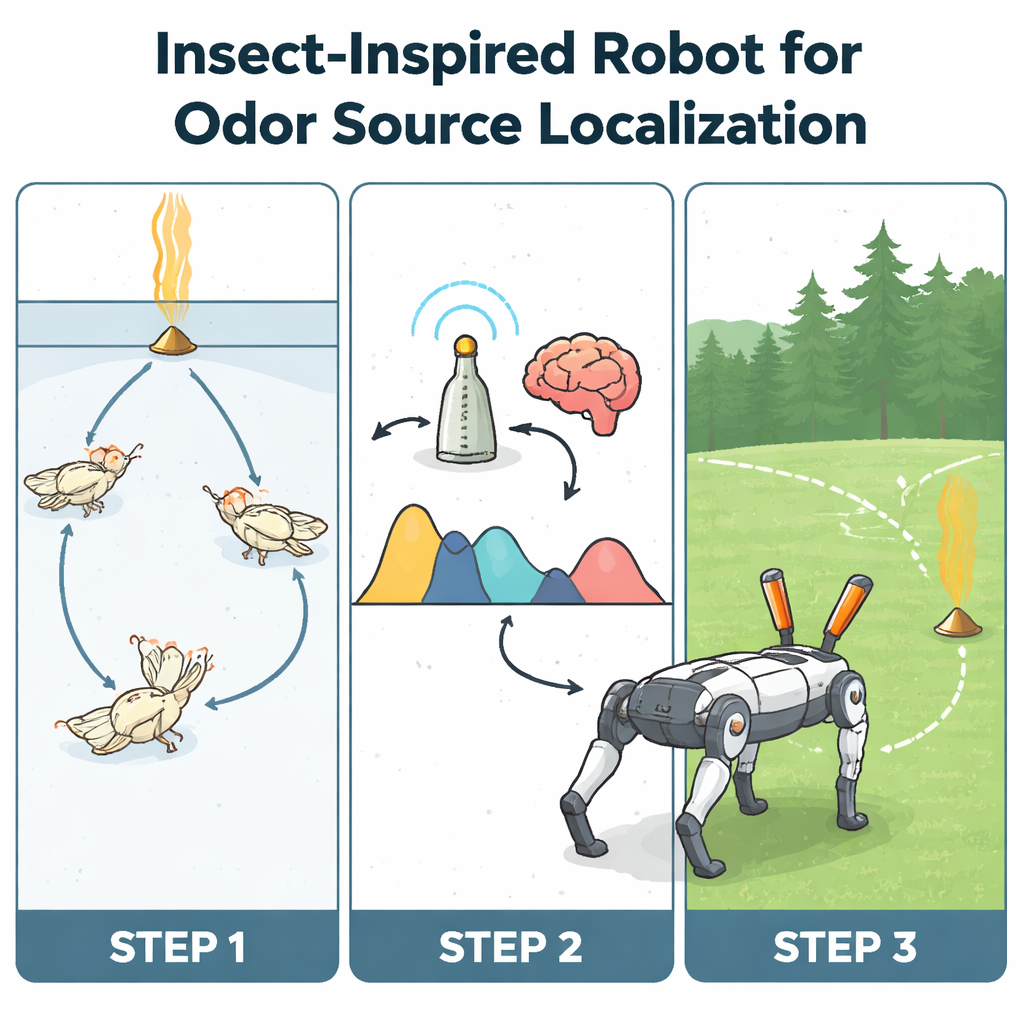
דמיין רובוט חיפוש והצלה שמנסה לאתר דליפת גז או ניצול לכוד בתוך בניין קרס — ואז אחד החיישנים המרכזיים שלו מתקלקל. רובוטים של היום נכשלים לעתים קרובות בתרחישים מסוג זה. המחקר הזה שואב השראה ממומחה מפתיע בניווט מבוסס ריח, זן הזחל המשי הזכרי, כדי להראות כיצד בעלי חיים יכולים להמשיך לעקוב אחרי מקור ריח אפילו לאחר שאיבדו חצי מ"האף" שלהם, וכיצד ניתן להעתיק אסטרטגיה זו לרובוטים ארבע-רגליים.
נווט קטן עם חוש ריח עוצמתי
חיות רבות — מחרקים וכלבים — משתמשות באותות כימיים נשאפים דרך האוויר כדי למצוא מזון, בני זוג או מקלט. ריחות שימושיים במיוחד כששדה הראייה חסום על ידי חושך, עשן או הריסות. אך זרמי ריח במציאות אינם מסודרים: הרוח משתנה, מבנים ועצים מעקמים את הזרימה, והריח החזק ביותר אינו תמיד ישירות נגד כיוון הרוח מן המקור. רוב רובוטי החיפוש מניחים שכל חיישני הריח שלהם פועלים באופן מושלם ושכיוון הריח והכיוון הרוח תואמים בדיוק. בטבע, אף אחת מהנחות אלה אינה בהכרח נכונה. זחל המשי Bombyx mori מספק דוגמה נגדית טבעית: הזכרים יכולים לאתר נקבות המשחררות פרומונים מיניים גם באוויר אפוף סבך, ומעניין — אף כשהורדתה אחת מהאנטנות שלהן — האיבר המרכזי לחוש הריח.
איך עשבים מתמודדים לאחר איבוד אנטנה
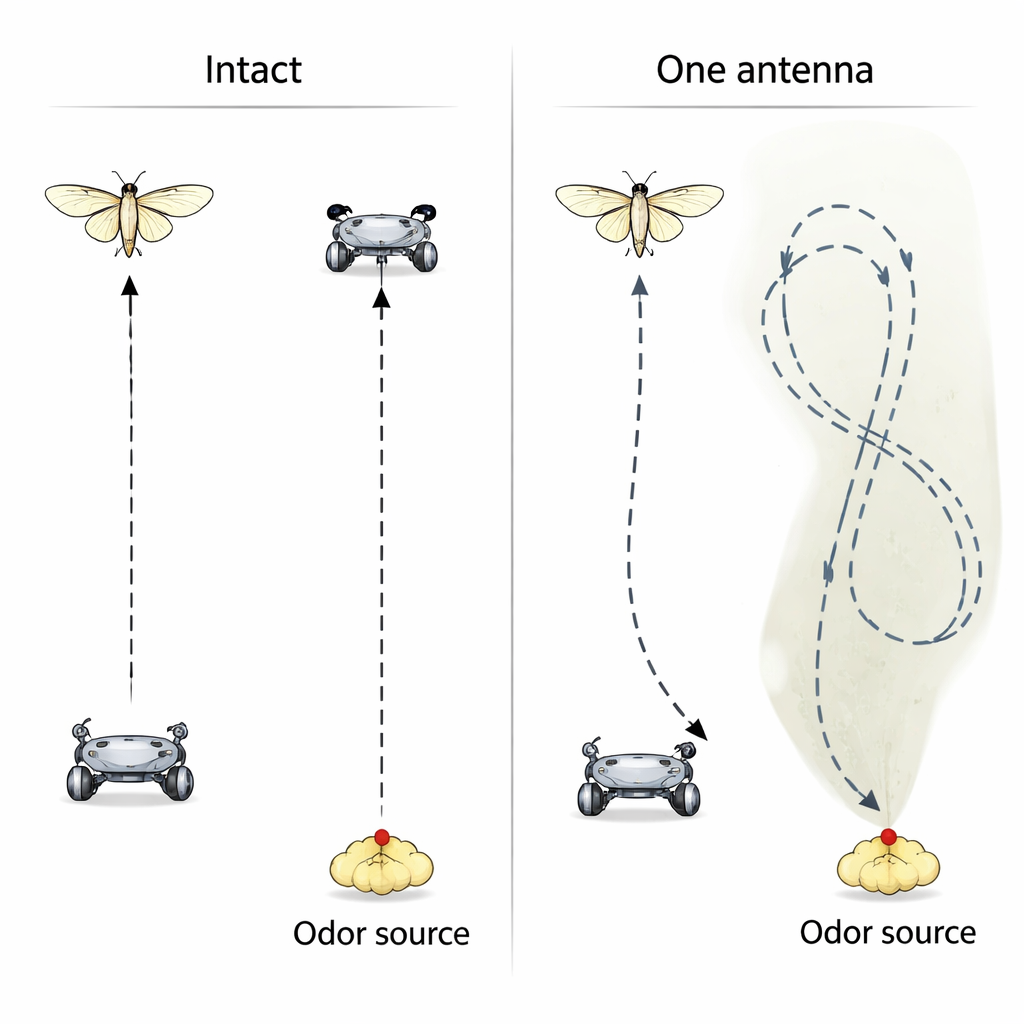
ראשית, החוקרים בדקו עד כמה זכרים של זחל המשי שלמים, ולזכרים מהם הוסרה האנטנה השמאלית, הצליחו ללכת אל מקור ריח במעבדה. שתי הקבוצות התחילו ממרחק של 15 סנטימטר מנקודת פליטת הפרומון. להפתיע — שיעור ההצלחה — הגעה למקור בתוך דקה — לא ירד באופן מובהק לאחר הסרת אנטנה אחת. מה שכן השתנה היה המסלול: זחלים שלמים נטו לצעוד במסלול די ישר, בעוד זחלים עם אנטנה אחת לקחו מסלולים ארוכים ומפותלים יותר שהסתחררו בכיוון צדו של האנטנה שנותרה. מדידות מפורטות של תנועות ראש הראו כי הזחלים החליפו את אסטרטגיית הסיבוב שלהם בהתאם למיקום לאורך האנטנה שנותרה שבו התגלה הריח — קרוב לבסיס או קרוב לקצה — ובאיזה כיוון הם סובבים כרגע.
שני חוקים פשוטים שמסתתרים בהתנהגות מורכבת
על ידי פליטה חוזרת של ריח משמאל ומימין ומעקב אחר זוויות ראש הזחלים, הצוות המיר את ההתנהגות לעקומות הסתברות המראות כמה סביר שיהזחל יסובב שמאלה או ימינה אחרי כל דחף ריח. כאשר הריח פגע קרוב לבסיס האנטנה, הזחל העדיף בחוזקה להמשיך להסתובב לאותה הצד, תוך התחייבות מעשית לעקוב אחרי הסיבוב הנוכחי. כאשר הריח פגע קרוב לקצה, הבחירה הפכה מאוזנת יותר, עם הטיה קלה לחקור את הצד הנגדי. בפשטות, איבוד אנטנה לא גרם לזחל לוותר; זה גרם לו לאמץ דפוס חיפוש שמדגם את שני צדי המרחב בצורה רחבה יותר, במיוחד לאורך "הקצה" של ענן הריח שבו עוצמת הריח משתנה במהירות.
לימוד רובוט ארבע-רגלי להרגיש כמו זחל משי
בהמשך, החוקרים בנו רובוט ארבע-רגלי עם גלאי ריח על ה"ראש" שלו, הממוינים כדי לחקות את המבנה מבסיס לקצה של אנטנה. הם פיתחו שני אלגוריתמי חיפוש. הראשון, גישה סטנדרטית בהשראת הזחל שנקראת SZL (לשמות surge–zigzag–loop), מניחה שתי חיישני ריח עובדים ובוחרת את כיוון ה"התקדמות" הישרה שלה בהתאם לזמני הגילוי היחסיים משמאל ומימין. השני, שנקרא אלגוריתם בהשראת זחל מותנה בהקשר (CDMI), משלב את חוקי הזחל החדשים: הוא מעריך היכן לאורך החיישן שנותר התגלה הריח ומשתמש בעקומות ההסתברות שנגזרו מהניסויים בבעלי החיים כדי להחליט לאיזו כיוון לנוע וכמה חדה תהיה הפנייה. במבחנים פנימיים, SZL עבד היטב כאשר שני החיישנים שלמים, וסיפק מסלולים מהירים יחסית וישרים. אך כאשר אחד החיישנים הושבת, CDMI עלה בבירור על SZL, ומצא את המקור בתדירות גבוהה יותר על ידי מעקב אחרי הקצה המשתנה של שדה הריח במסלולים לולאתיים הדומים לאלה של זחלים עם אנטנה אחת.
רובוטים שנשארים חכמים כשהדברים נשברים
כדי לבדוק את הרעיון בסביבה קשה יותר, הצוות ניסה את הרובוטים בחוץ, שם רוח טבעית וסחף גורמים שהופכים את ענני הריח לפאצ'יים מאוד. הם העניקו לרובוט השלם את האלגוריתם הסטנדרטי SZL ולרובוט ה"חד-חיישן" את CDMI. שניהם השיגו שיעורי הצלחה דומים, אך הרובוט הפגום שהשתמש באסטרטגיה המסתגלת בהשראת הזחל מצא לעתים קרובות את המקור במסלולים קצרים ופחות מתפתלים. המשמעות היא שבתנאים קשים בעולם האמיתי עדיף לעתים לעבור מתוכנית חישה מדויקת אך שבירה לאסטרטגיה חקירתית יותר, שעוקבת אחר הקצה. המסר הרחב הוא שניווט חסין אינו דורש בינה מלאכותית מסובכת יותר; במקום זאת, כללים פשוטים המבוססים ביולוגית — קשורים לאופן פריסת החיישנים על הגוף ולאופן שבו הגוף מתקשר עם סביבתו — יכולים לסייע ליצור רובוטים שממשיכים לתפקד גם כאשר חלקים מרכזיים מתקלקלים, תכונה חיונית למשימות חיפוש והצלה וחקירה ארוכת טווח.
ציטוט: Shigaki, S., Yokota, K., Sekiwa, R. et al. Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization. npj Robot 4, 12 (2026). https://doi.org/10.1038/s44182-026-00080-5
מילות מפתח: ניווט ריחני, רובוטיקה בהשראת ביולוגיה, איתור מקור ריח, בינה מלאכותית בהשראת חרקים, מודעות מגושמת