Clear Sky Science · he
מי-מסתגל למגע עם כף פעילה לאחיזה מיומנת
רובוטים שיכולים להרגיש את מה שהם אוחזים
דמיינו רובוט שיכול לקוטף בעדינות תות בשל, לפתוח בקבוק עם מנגנון למניעת גישה לילדים או להבריג נורת חשמל מעל הראש — הכל מבלי לסחוט, להפיל או ליישר משהו בטעות. המאמר מתאר מכשיר אחיזה רובוטי חדש שמקרב את המכונות למיומנות ידנית עדינה בדומה לאדם על ידי כך שהוא מצייד את הרובוט לא רק באצבעות חכמות, אלא גם בכף פעילה ורגישה מאוד.
כפה שעושה יותר מאשר להחזיק
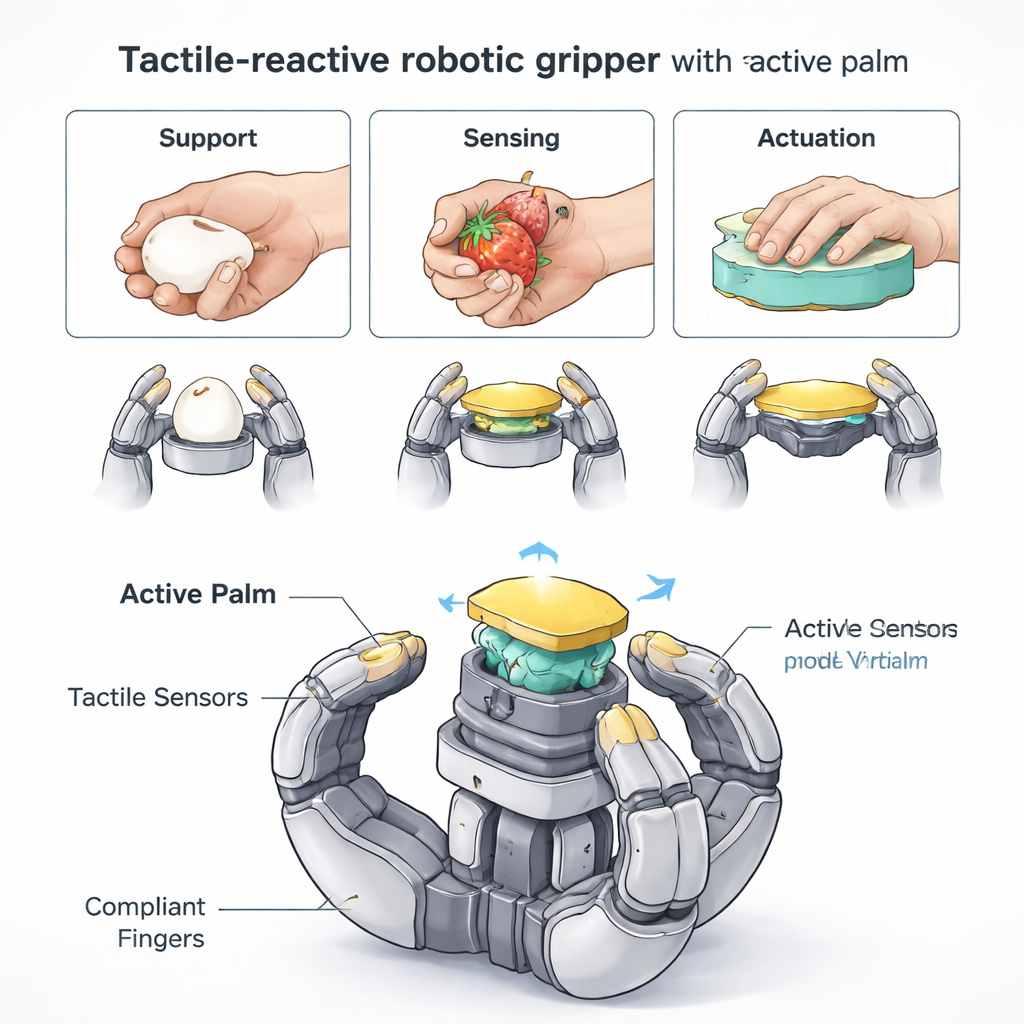
רוב הידיים הרובוטיות כיום הן או שיניים פשוטות וקשות שיכולות רק לתפוס, או ידיים מרובות אצבעות ומסובכות שקשה לבנות ולשלוט בהן. תובנה מרכזית במחקר הזה היא שיד האדם מסתמכת במידה רבה על כף היד — לא רק על האצבעות — לתמיכה, לחישה ולדחיפה. החוקרים תכננו מכשיר אחיזה תלת‑אצבעי עם כף מרכזית שיכולה לנוע מעלה‑מטה ומכוסה בחיישן מישוש מבוסס מצלמה. לכל fingertip יש גם ריפוד גמיש החושף לחץ. ביחד החלקים האלה מאפשרים למכשיר להרגיש היכן ובאיזה אופן הוא נוגע בחפץ ולהתאים את האחיזה בזמן אמת, אף על פי שהמערכת כולה משתמשת רק בשבעה מפרקים נעים.
תנועות פשוטות, דרכים רבות לאחוז
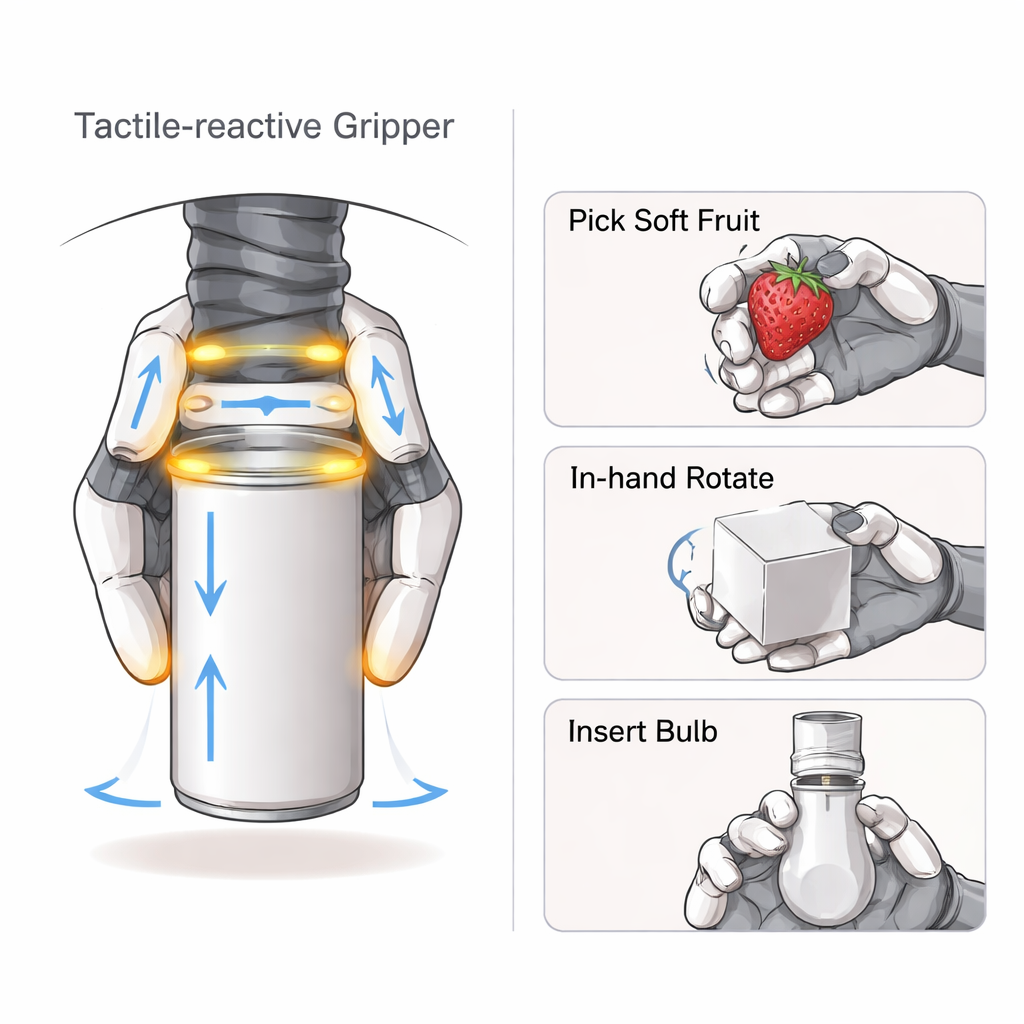
שלוש האצבעות הזהות של המכשיר יכולות להסתובב ולהתכופף, מה שמאפשר מספר סגנונות אחיזה יומיומיים: לכוד חפצים גדולים כמו כדורים, לנשוך חפצים דקיקים כגון כרטיסים, ולהצמיד כלים כבדים באחיזה כוחנית. מבנה האצבע הרך והדמוי־שדרה מתעטף באופן טבעי סביב חפצים בצורות שונות בלי תכנות מפורט. במקביל, הכף מחליקה כלפי מעלה ולמטה כמו מעלית, כך שהיא יכולה ללחוץ נגד חפץ, לחלוק את העומס עם האצבעות או להזיז את מיקום החפץ ביד. סימולציות וניסויים מראים שגם עם שני מפרקים בלבד לכל אצבע בנוסף לכף הנעה, היד יכולה להזיז חפצים בכיוונים רבים ולהימנע מפוזות מסורבלות שקשות לשליטה.
להרגיש גם עם האצבעות וגם עם הכף
כדי להבין מה היא מחזיקה, המכשיר מחבר שלושה סוגי חישה: תמונות מישוש מפורטות מהכף, מפות לחץ מקצות האצבעות, וקריאות של זוויות המפרקים שלו עצמו. מערכת למידת מכונה מאחדת את האותות הללו, ומשקללת יותר את הרמזים היעילים ביותר עבור כל חפץ. במבחנים עם פחיות משקאות וכדורים בגדלים וחומרים שונים, המערכת הצליחה לזהות את מה שהיא אוחזת בדיוק של כמעט 99%. חוש המישוש העשיר הזה גם מנחה כמה חזק ללחוץ, מתי להפסיק לסגור את האצבעות וכיצד להזיז את הכף כדי לשמור על מגע יציב מבלי ליצור חיכוך מיותר.
ממבחנים לחיים פרי ונורות
הצוות בחן את המכשיר במבחן אחיזה מקובל בשדה עם חפצים יומיומיים כגון כדורים, כלים וחלקי חומרה קטנים. הוא קיבל דירוג גבוה יותר מאשר כמה מכשירי מחקר מוכרים לצד שימוש בפחות חלקים נעים. מעבר למערכי מבחן, המכשיר הראה שהוא יכול לקצור פירות עדינים — תותים, ענבים, עגבניות ועוד — מבלי סימני כתם נראים אפילו ימים לאחר מכן, כפי שנבדק באור אולטרה‑סגול. הוא גם הצליח לתרגם ולהסובב קוביות וצילינדרים בדיוק בתוך ידו, להבריג נורה לתוך שקע הפונה כלפי מעלה, לדחוף בוכנה של מזרק תוך החזקת החבית, ולפתוח פקקים לילדים על ידי לחיצה וסיבוב. במשימות רבות אלו, הכף הנעה סיפקה את הדחיפה, התמיכה או החישה הנוספת שחסר במכשירים שמסתמכים רק על אצבעות.
מדוע זה חשוב לרובוטים של העתיד
העבודה מראה שרובוטים לא תמיד זקוקים ליותר ויותר אצבעות או מפרקים כדי להיות מיומנים. על ידי תיאום זהיר של כמה אצבעות גמישות עם כף פעילה ובעלת חישה, המכשיר משיג שילוב של כוח, עדינות ומודעות שמתחיל להזכיר יד אנושית. מאחר שהחלקים מודפסים ברובם בתלת‑ממד ומשתמשים בחיישנים מסחריים זמינים, העיצוב קל יחסית לשכפול. עם בקרה מבוססת למידה נוספת, מכשירי אחיזה דומים יכולים לעזור לרובוטים לטפל בקניות, לסייע בטיפול ביתי או לעבוד בבטחה עם אנשים במפעלים — להרגיש בביטחון את מה שהם עושים, במקום לנחש.
ציטוט: Zhou, Y., Lee, W.S., Gu, Y. et al. Tactile-reactive gripper with an active palm for dexterous manipulation. npj Robot 4, 13 (2026). https://doi.org/10.1038/s44182-026-00079-y
מילות מפתח: מכשיר אחיזה רובוטי, חישה מישושית, אחיזה מיומנת, יד רובוטית, כף פעילה