Clear Sky Science · he
שימוש בפרופריוספציה בכנפיים רכות תת-מימיות מאפשר דחיית הפרעות היברידית פסיבית-אקטיבית
כנפיים חכמות מתחת למים
כל מי שצפה בציפור מרחפת ברוח פרועה או בדג השומר על יציבות בזרם מהיר ראה את הטבע פותר בעיה הנדסית קשה: איך לשמור על מסלול כשהנוזל שסביב מסרב להתנהג. המחקר הזה מראה כיצד סוג חדש של כנף רכה תת-מימית, המצוידת "תחושת עצמי" בדומה לפרופריוספציה של בעלי חיים, יכולה באופן אוטומטי להרגיש שינויים פתאומיים בזרימה ולעצב את עצמה מחדש כדי להישאר יציבה. העבודה מצביעה על כיוון של רובוטים תת-מימיים עתידיים שיחליקו יותר כמו בעלי חיים ופחות כמו מכונות קשיחות, יחסכו אנרגיה ויתמודדו טוב יותר עם ימים סוערים.
ללמוד מציפורים ודגים
בטבע, כנפיים וסנפירים אינם להבות קשיחות; הם מתכופפים, מסתלסלים וגמישים. ציפורים חשות תנועת אוויר דרך קולטנים זעירים בנוצותיהן, בעוד דגים משתמשים בתאים רגישי-לחץ לאורך גופם ובקרני הסנפיר. החיישנים המובנים הללו מאפשרים לחיות להרגיש כיצד שלוחותיהן מעוותות במים או באוויר ולהגיב כמעט באופן מיידי, לדחות זינוקים וטורבלנטיות. לעומת זאת, רוב כלי השיט התת-מימיים משתמשים במשטחי בקרה קשיחים ובמכשירים נפרדים למדידת זרימה, מה שהופך אותם איטיים ותובעניים מבחינת אנרגיה כשהסביבה נעשית כאוטית. המחברים טוענים ששילוב הגמישות והחישה במבנה רך אחד יכול לצמצם את הפער הזה.
כנף רכה עם חושים מובנים
הקבוצה בנתה חצי כנף לשימוש תת-מימי שמשלב זנב רך וגמיש עם חוד קשיח. בתוך החלק הרך רצים צינורות מתנפחים מלאי נוזל, שניתן ללחוץ כדי לשנות את העיקום של הכנף, או את הקמנט שלה. מבחוץ הם הדביקו "עור" אלקטרוני דק העשוי סיליקון וחוטי מתכת-נוזלית. כשהכנף מתכופפת, המרווח בין המוליכים הקבורים משתנה, ומשנה את הקיבול החשמלי שלהם. על ידי אימון מודל למידת מכונה פשוט להתאים בין האותות הללו לצורות שעוקבות מצלמה, החוקרים הפכו את העור האלקטרוני לחיישן צורה מדויק מאוד. לאחר האימון, המערכת יכולה לאמוד את הקמנט של הכנף בזמן אמת ללא מצלמות חיצוניות, אפילו תוך שקיעה במים.
להפוך צורה לבקרה
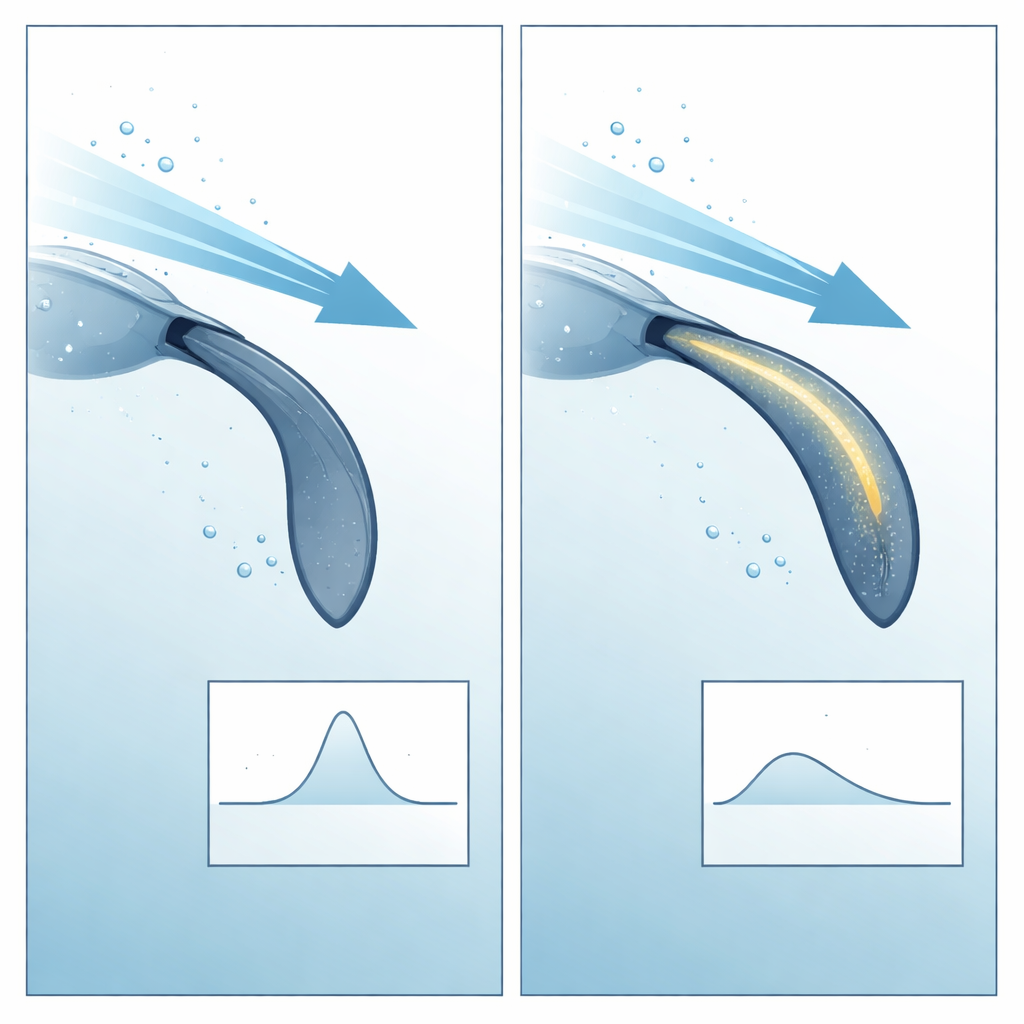
עם כנף רכה פרופריוספטיבית זו המותקנת במנהרת מים, החוקרים חיקו זינוקים כתנודות פתאומיות בזווית הכנף לנוכח הזרימה. ראשית הראו, בתנאים יציבים, כי על ידי התאמת הקמנט הם יכולים לייצר את אותו עילוי בזוויות זרימה שונות, או עילויים שונים באותה זווית. משמעות הדבר היא שכאשר זינוק מנסה להוציא את הכנף מאיזון, קיים "נתיב" במרחב הצורות שיכול לשחזר את העילוי הרצוי. לאחר מכן הם תכנתו תגובת אופ-לופ אידיאלית — בידיעה מדויקת מתי הזינוק יתרחש — לנפח או לרוקן את הצינורות הפנימיים ברגעים הנכונים. בתסריט זה, שינוי הקמנט הקטין את ירידת העילוי בזמן הפרעה מכ־50% לכ־10% בלבד.
לתת לכנף להגיב בעצמה
הבחינה המאתגרת יותר הייתה לתת לכנף להחליט בעצמה מתי משהו אינו תקין. כאן העור האלקטרוני חושף "חתימה" אופיינית באות הקמנט: היעלמות מהירה ותנודה כשהגוף הרך גמיש תחת שינוי פתאומי בזרימה. כאשר דפוס זה מופיע, בקר פשוט מנפח את הצינורות בכיוון שסביר שהשיב את העילוי אל המטרה, ללא חישוב מפורש של הזרימה או הכוחות. אפילו אסטרטגיה מינימליסטית זו עובדת היטב. בהשוואה לכנף קשיחה שקולה, הכנף הרכה הבלתי מופעלת לבדה מצמצמת את הדחף של זינוק — במובן הכולל של הדחיפה שניתנת על פני זמן — בכ־פי שלושה. כאשר מוסיפים בקרה אקטיבית, הדחף הכולל הבלתי רצוי בעילוי מצטמצם עד 87%, קרוב ואף עולה על יכולות הטיפול בזינוקים שדווחו אצל כמה ציפורים, אם כי בתווך שונה.
מדוע זה חשוב לרובוטים העתידיים
לקורא כללי, המסקנה המרכזית היא שהפיכת רובוטים תת-מימיים לרכים ובעלי מודעות עצמית תוכל להפוך אותם הן לעמידים יותר והן ליעילים יותר. במקום להתמודד עם הפרעות באמצעות מנועים כוחניים וחיישנים חיצוניים מסובכים, הגוף הגמיש והעור המוטמע של הרובוט מסייעים לספוג ולקרוא את הזרימה, ומפעילים שינויים צורתיים מתונים שמחזיקים אותו על המסלול. בעוד שהמחקר מתמקד בכנף ניסיונית יחידה במכל מבוקר, אותם עקרונות יכולים לחול על כלי שיט שלמים או על רובוטים שחיינים בדמות דג. בטווח הארוך, "אינטליגנציה מתגולמת" מסוג זה עשויה לאפשר למכונות לחקור אוקיינוסים טורבולנטיים באותה חסות שקטה ששמורים לציפורים ולדגים באוויר ובמים.
ציטוט: Micklem, L., Dong, H., Giorgio-Serchi, F. et al. Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection. npj Robot 4, 16 (2026). https://doi.org/10.1038/s44182-026-00078-z
מילות מפתח: רובוטיקה רכה, כלי שיט תת-מימיים, עיצוב בהשראת ביולוגיה, דחיית הפרעות בזרימה, חישת פרופריוספציה