Clear Sky Science · he
תפיסה מישושית מוחשית של תכונות של עצמים רכים
למה חשוב ללמד רובוטים להרגיש
דמיינו רובוט שבודק בעדינות את בטנו של מטופל, מיין פירות בשלים בלי לגרום לשחיקה, או מורכב חלקים שבירים באמצעות מגע בלבד. כדי לבצע כל אחד מהמשימות האלה בבטחה, על הרובוטים ללמוד "להרגיש" עצמים רכים בצורה עשירה, דמויית‑אנוש. מאמר זה מתאר כיצד חוקרים בנו עור אלקטרוני וסוג חדש של מודל למידה כך שרובוטים יוכלו לחוש טוב יותר את הרכות, הצורה ומרקם המשטח של עצמים רכים—ובאופן זה לקרב את המכונות צעד נוסף למגע זריז באמת.
בניית חוש מישוש מתקדם
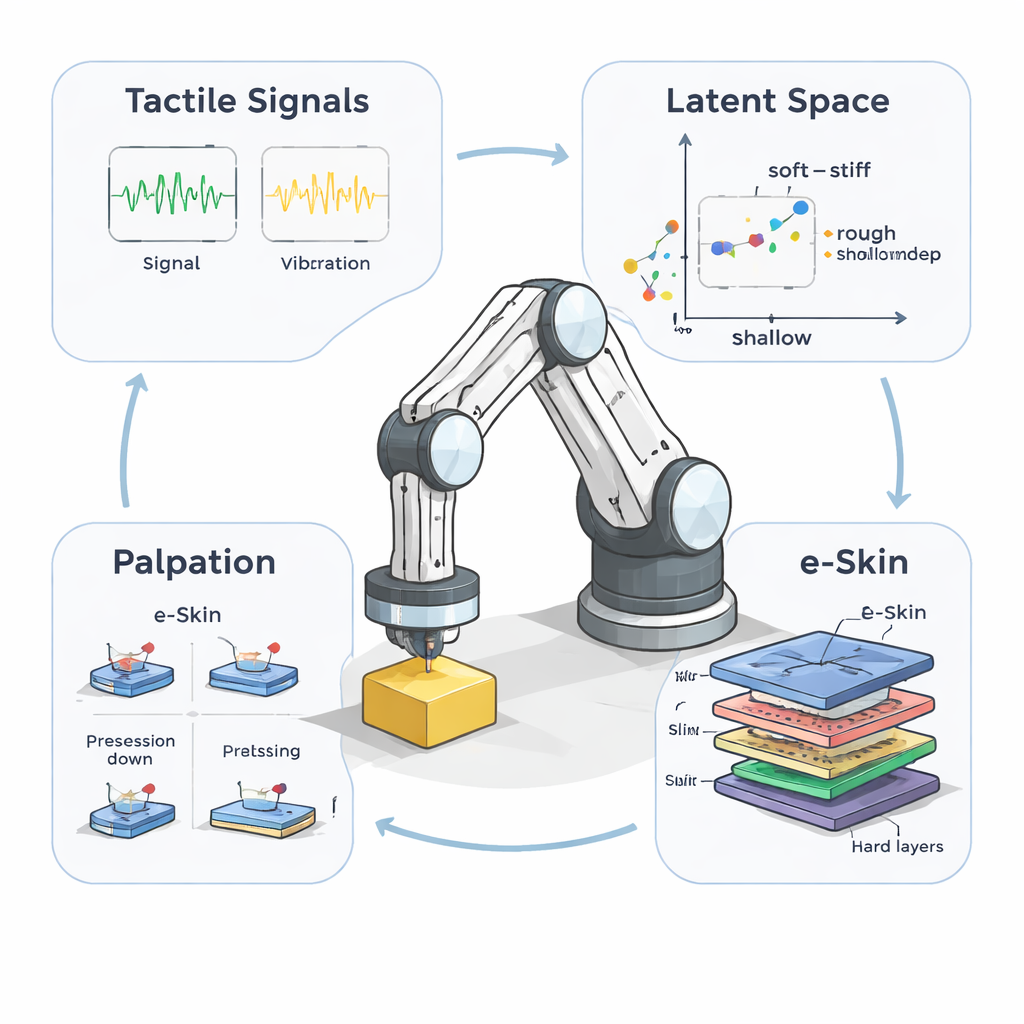
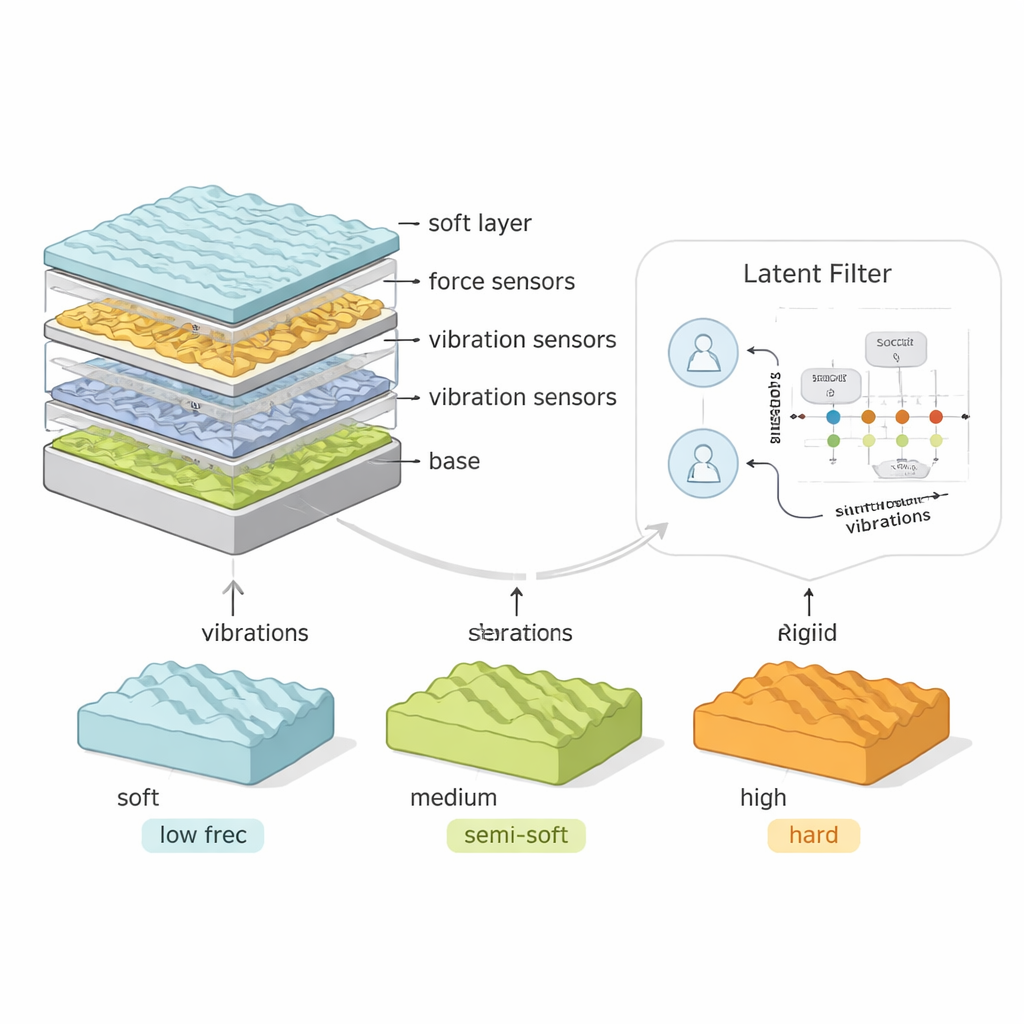
עור האדם רך, מרובד ומלא בקולטני מגע שונים שמגיבים ללחץ, למתיחה ולרעד. הצוות שאף לחקות יכולות אלו ברובוט. הם פיתחו עור אלקטרוני מודולרי, או e‑Skin, המורכב משכבות סיליקון מונחות עם חיישנים אחוריים. שתי שכבות מכילות רשתות צפופות של חיישני כוח שמודדים עד כמה העור נדחס בנקודות שונות, בעוד ששכבה שלישית מחזיקה מיקרו־מאיצים הקולטים רעידות מהירות, כמו הויברציה שמרגישים כשגולשים עם האצבע על בד מחוספס. על ידי החלפת סוגי סיליקון ניתן היה לעשות את ה‑e‑Skin עצמו רך יותר או קשה יותר, ועל ידי הפעלה וכיבוי של שכבות חיישנים ניתן היה לבדוק שילובים שונים של "איברי חישה".
עיצוב עולם של חפצים רכים
כדי לחקור את המישוש בצורה מבוקרת, החוקרים רצו יותר מחסימות גומי פשוטות. הם יצרו ספרייה של "עצמי גל" עם מאפיינים מותאמים בקפידה. לכל עצם היה משטח עליון גלי עם בליטות שיכולות להיות רדודות או גבוהות (אמפליטודה) וצפופות או מרוחקות זו מזו (תדירות מרחבית), וכל אחד נשפך מחומרים שנעו מסיליקון רך מאוד עד פלסטיק קשיח. בדגימות מסוימות הוסתר גם שכבה דקה וקשה מתחת למשטח רך, המדמה רקמות או חומרים שמשתנים ככל שלוחצים עמוק יותר. זה אפשר לצוות לדעת את הרכות והמרקם המדויקים של כל עצם שהרובוט נגע בו, ולשוות בין מה שהרובוט "הרגיש" לבין המציאות.
לימוד הרובוטים לחקור באמצעות מגע
בדיוק כפי שאנשים דוקרים, לוחצים ומחליקים את אצבעם בדרכים שונות כדי לשפוט עצם, הרובוט השתמש בשלוש תנועות בסיסיות של מישוש. בלחיצה הוא נע ישר למעלה ולמטה כדי לבדוק את הרכות הכוללת. בפריסיה (precession) הוא הטה וגלגל את ה‑e‑Skin, נוגע בכמה אזורים סמוכים ובודק צורות מורכבות יותר. במחליק הוא זז הצידה לאורך המשטח כדי להבליט מרקמים עדינים וחיכוך. עבור כל עצם ביצע הרובוט את התנועות הללו בעומקים ובמהירויות משתנים, וייצר אלפי אותות מישוש משתנים בזמן—כוחות שמשתנים על פני העור ורעידות שמתפשטות דרכו. זרמי נתונים דינמיים ועשירים אלה נותנים מידע רב יותר מאשר דחיפה סטטית בודדת.
גילוי דפוסים חבויים במישוש
כדי לפענח שפע המידע הזה, המחברים הציגו מודל למידת מכונה שהם קוראים לו המסנן הסמוי (Latent Filter). במקום לנסות לתייג עצמים ישירות, המודל לומד "מפה" פנימית שבה כל נקודה מסכמת את האינטראקציה המתמשכת של הרובוט עם העצם. מרחב סמוי זה מובנה כך שחלק מהרכיבים מגיבים במהירות לאותות מגע מיידיים, בעוד אחרים מאגרים מידע לאט לאורך זמן. באימון המסנן הסמוי על אינטראקציות רבות הראו החוקרים שמפה פנימית זו מסתדרת באופן טבעי עם תכונות פיזיקליות משמעותיות כמו מחוספסות השטח, גובה הבליטות וקושי—אף על פי שהמודל מעולם לא הוצהר מפורשות עם תוויות אלו. שלב רגרסיה נפרד אימת שהתכונות החבויות הללו יכולות לחזות את התכונות המכאניות האמיתיות של העצם בדיוק טוב.
איך העור, החושים והתנועה פועלים יחד
הניסויים חשפו שאף שכבת חיישנים בודדת או אסטרטגיית תנועה אחת אינן הטובות בכל המצבים. שילוב מידע רעידות וכוח באמצעות גישת "מיזוג מאוחר"—בה כל סוג אות מעובד נפרד לפני מיזוג—ניב את ההבנה האמינה ביותר של עצמים רכים. שתי שכבות כוח סייעו למערכת לחוש גזירה ומתיחה, שהם חיוניים לגילוי קשיחות ומבנים פנימיים מוסתרים, בעוד שהרעדים היו שימושיים במיוחד להרגשת מרקמים עדינים בזמן החלקה. הרכות המכנית של ה‑e‑Skin עצמה גם היא חשובה: עור קשה יותר היה טוב יותר למדידת קשיחות כוללת וצורה, בעוד עור רך יותר הצטיין בחישה של שונות עדינה בחומרים גמישים או מרובדים. התוצאות מרמזות שיש לעצב מישוש רובוטי בצורת תיאום: תכונות העור, האלקטרוניקה החושית, ואופן תנועת הרובוט צריכים להיות מכוונים יחד.
מה זה אומר לרובוטים יום־יומיים
על ידי איחוד של e‑Skin מרובדת בהשראה אנושית עם מודל למידה חזק שמכבד את תפקיד הפעולה, עבודה זו מראה כיצד רובוטים יכולים לבנות חוש מישוש עמוק יותר. במקום להסתמך רק על מצלמות או ספי כוח פשוטים, מכונות עתידיות יוכלו להרגיש איך עצם נכנע, רועד ומשתנה כאשר הם בוחנים אותו, ואז לכוונן את האחיזה או התנועה באופן מיידי. יכולות אלו חשובות ליישומים כמו בדיקה רפואית על ידי מישוש, טיפול במזון רך, ותפעול פריטים רכים בבתים ומפעלים. בפשטות, המאמר מדגים שבעת רצון לגעת בעולם ביעילות כמו שלנו, הרובוטים צריכים לא רק חיישנים טובים, אלא גם "גוף" נכון, הרגלי תנועה מתאימים—והדרך חכמה לארוג את כל המידע הזה להבנה הקוהרנטית של מה שהם מרגישים.
ציטוט: Dutta, A., WM Devillard, A., Zhang, Z. et al. Embodied tactile perception of soft objects properties. npj Robot 4, 15 (2026). https://doi.org/10.1038/s44182-026-00077-0
מילות מפתח: מישוש רובוטי, עור אלקטרוני, חישה של עצמים רכים, תפיסה מישושית, רובוטיקה מוחשית