Clear Sky Science · he
GenHand: העברה קינטית כללית של אחיזת אדם
ללמד רובוטים להחזיק חפצים כמו שאנו עושים
מלשלוף ספל קפה ועד לסובב מברג, ידינו מטפלות בחפצים במראה קל ושגרתי. רובוטים, לעומת זאת, לעתים מתקשים לתפוס פריטים יום-יומיים באופן אמין, ובמיוחד כאשר המלקט שלהם אינו דומה ליד אנושית. מאמר זה מציג את GenHand, מערכת שלומדת מתנועות ידיים אנושיות בתמונות רגילות והופכת אותן לאחיזות יציבות בסגנון אנושי עבור סוגים רבים של ידיים רובוטיות.
מדוע ידיים רובוטיות צריכות יותר ממהלכים שמעתיקים אותנו
מערכות טלה-אופרציה ולמידת חיקוי רבות מנסות להעתיק ישירות את תנוחת היד האנושית ליד הרובוטית. הן מתאימות מיקום קצות האצבעות וזוויות המפרקים ככל האפשר. זה עובד רק כאשר היד הרובוטית דומה במראה למדי ליד אנושית ובעלת מספר אצבעות ומפרקים דומה. ברגע שמלקט הרובוט פשוט יותר — למשל שתי אצבעות שטוחות — התנוחה המועתקת עשויה לא ליצור אחיזה בטוחה. גישות אלה גם מתעלמות במידה רבה מצורת החפץ וממקומות המגע הרצויים, כך שהאחיזות המתקבלות יכולות להחליק, לאבד איזון או שלא ליצור מגע נכון עם המשטח.
להסתכל על היד והחפץ יחד
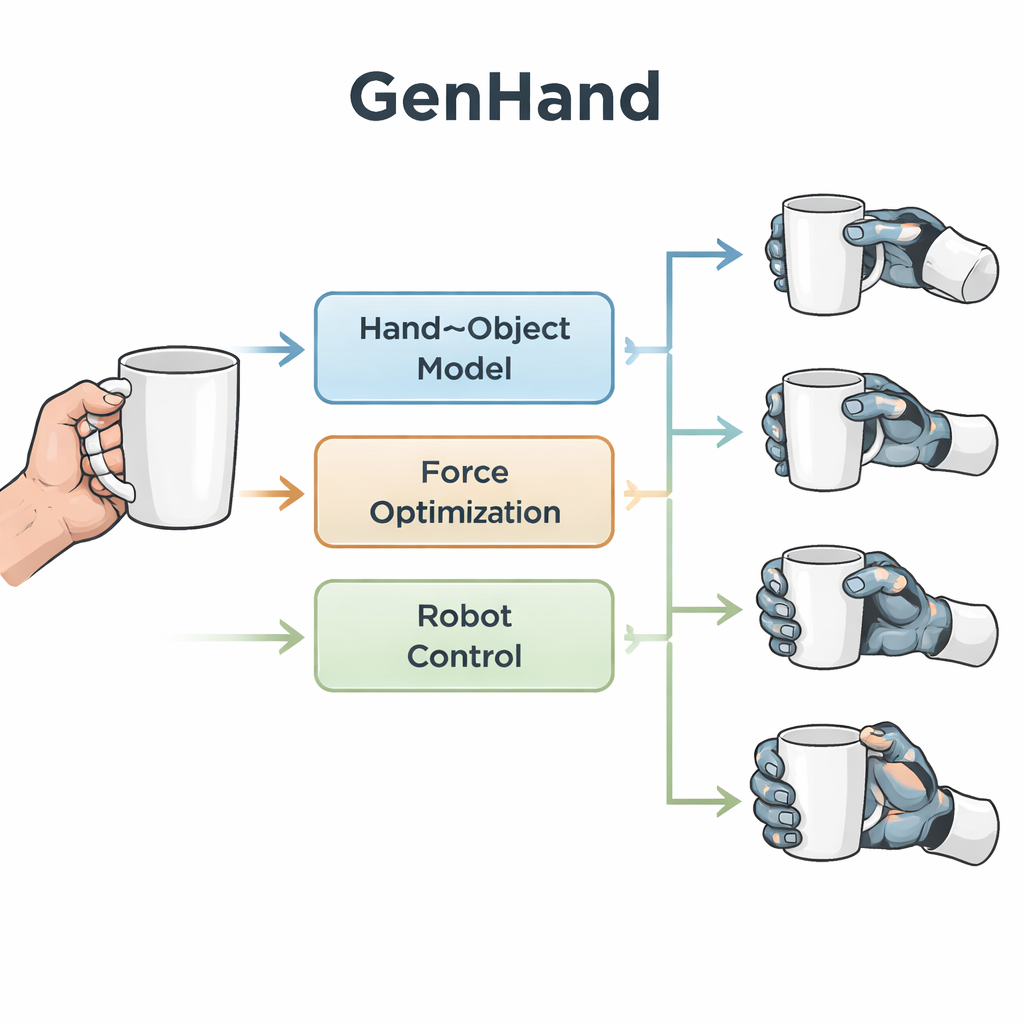
GenHand מתמודדת עם הבעיה על ידי מיקוד באינטראקציה בין היד לחפץ, לא רק בצורת היד. מתוך תמונת RGB רגילה, המערכת משחזרת מודל תלת‑ממדי מפורט של החפץ ומודל פרמטרי תלת‑ממדי של היד האנושית. היא משתמשת ברשת עצבית כדי להסקת תנוחת היד, ובייצוג מתקדם של "מרחק חתום" (signed distance) כדי לשחזר את פני השטח של החפץ. מזוג המודלים הזה, GenHand קובעת היכן קצות האצבעות האנושיות אכן נוגעות ובאיזה כיוונים הן מפעילות כוח על החפץ. לאחר מכן היא מאשכרת נקודות מגע אלו לקבוצות קטנות של אזורים ומשכי כוח משמעותיים המסכמים את המבנה ההכרחי של האחיזה האנושית תוך סינון פרטים מיותרים.
להמציא מחדש את האחיזה עבור כל רובוט
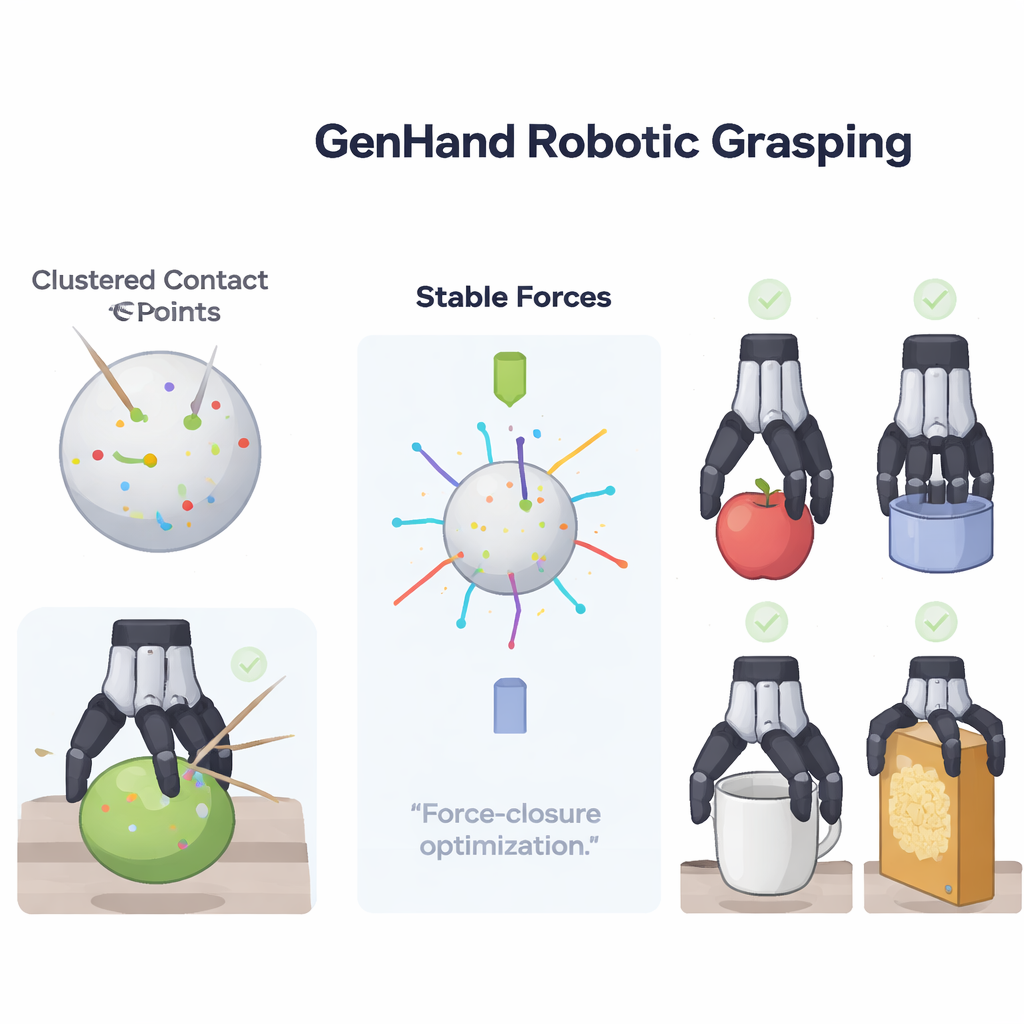
ברגע ש‑GenHand מבינה את אזורי המגע המרכזיים ואיך הם תומכים בחפץ, היא בונה סט חדש של "עוגני מגע" שמתאימים למלקט הרובוטי הספציפי. עבור מלקט פשוט בעל שתי אצבעות היא עשויה לשמור רק על שני אזורי מגע מנוגדים, כמו זוג אגודלים שמוצמדים לקופסה. עבור ידיים זריזות יותר עם שלוש, ארבע או חמש אצבעות, היא יכולה להקצות עוגנים נוספים כדי להתאים טוב יותר לדפוס המגע העשיר של האחיזה האנושית. שלב אופטימיזציה מתמטי מחפש אזורי מגע על פני החפץ שיכולים לאזן כוחות ורגעים בכל הכיוונים — תכונה הנקראת סגירות כוח (force closure). באופן קריטי, GenHand נשארת קרובה לנקודות המגע האנושיות המקוריות תוך הדגשה שהאחיזה המתקבלת תהיה יציבה פיזית במציאות.
מנקודות מגע יציבות לתנועות רובוטיות אמיתיות
עם עוגני מגע יציבים במקומם, שלב אופטימיזציה שני מוצא זוויות מפרקים ותנועות שורש ממשיות לרובוט שיכולות להגשים את העוגנים האלה בלי לעבור על מגבלות מפרקים או לגרום להתנגשויות עם החפץ. לשם כך GenHand מתאמת שוב ושוב את אתרי המגע האפשריים של הרובוט עם העוגנים הרצויים, מתאימה את התנוחה ובודקת האם קישורים חודרים את החפץ. תהליך זה מיושם על טווח של ידיים רובוטיות — ממלקט Robotiq פשוט דו‑אצבעי ועד יד Shadow בעלת חמש אצבעות ומורכבות גבוהה — ונבחן בסימולציית פיזיקה. בהשוואה לבסיס מוביל שמחקה רק גאומטריית קצות האצבעות, GenHand מניבה חוסר איזון כוחות נמוך בהרבה, מגע מדויק יותר עם המשטח ושיעורי הצלחה גבוהים משמעותית בהרמת והחזקת 20 חפצים יומיומיים בתנאי חיכוך משתנים.
לאן זה יכול לקחת רובוטים יום‑יומיים
לקריא ממוצע, המסקנה היא ש‑GenHand נותנת לרובוטים תחושה טובה יותר של "איך" להחזיק דברים, לא רק "איפה" למקם את אצבעותיהם. על ידי למידה מתוך אחיזות אנושיות אמיתיות ואכיפת כללי יציבות פיזית בסיסיים, היא יכולה להעביר את אותה הדגמה אנושית לידיים רובוטיות שונות מאוד ועדיין להשיג אחיזות מוצקות ואמינות. הדבר מקל על שליטה ברובוטים בטלה‑אופרציה, מסייע למערכות למידה להתאמן על דוגמאות עשירות יותר ומקרב אותנו לרובוטים ביתיים ותעשייתיים שיכולים למניפולציה בזהירות את מגוון החפצים שבן‑אדם מסוגל לטפל בהם.
ציטוט: Qi, L., Popoola, O., Imran, M.A. et al. GenHand: generalised human grasp kinematic retargeting. npj Robot 4, 19 (2026). https://doi.org/10.1038/s44182-026-00076-1
מילות מפתח: אחיזת רובוטים, טלה-אופרציה, הדגמה אנושית, ידיים רובוטיות, מניפולציה