Clear Sky Science · he
מאחז רובוטי מיקרו‑מודפס וזול עם מצלמה משולבת לחישה מבוססת ראייה של כוח ומומנט
למה מאחזים רכים זעירים חשובים
הרובוטים הולכים ומתמחים במשימות קטנות ועדינות, החל מרכבת גלגלי שיניים זעירים ועד לקצירת פירות רכים מבלי למעוך אותם. אבל רוב הידיים הרובוטיות עדיין לא מרגישות היטב—הן לוחצות לעתים קרובות בעיוורון, בלי ידע מדויק על עוצמת הלחיצה. מאמר זה מציג מאחז מיקרו‑מודפס וזול, בכינוי "The Seezer", שיכול גם לאחוז חפצים עדינים וגם "להרגיש" כוחות באמצעות מצלמה זעירה בתוך קצות האצבעות, במקום חיישני כוח יקרים.
יד עדינה שמראה
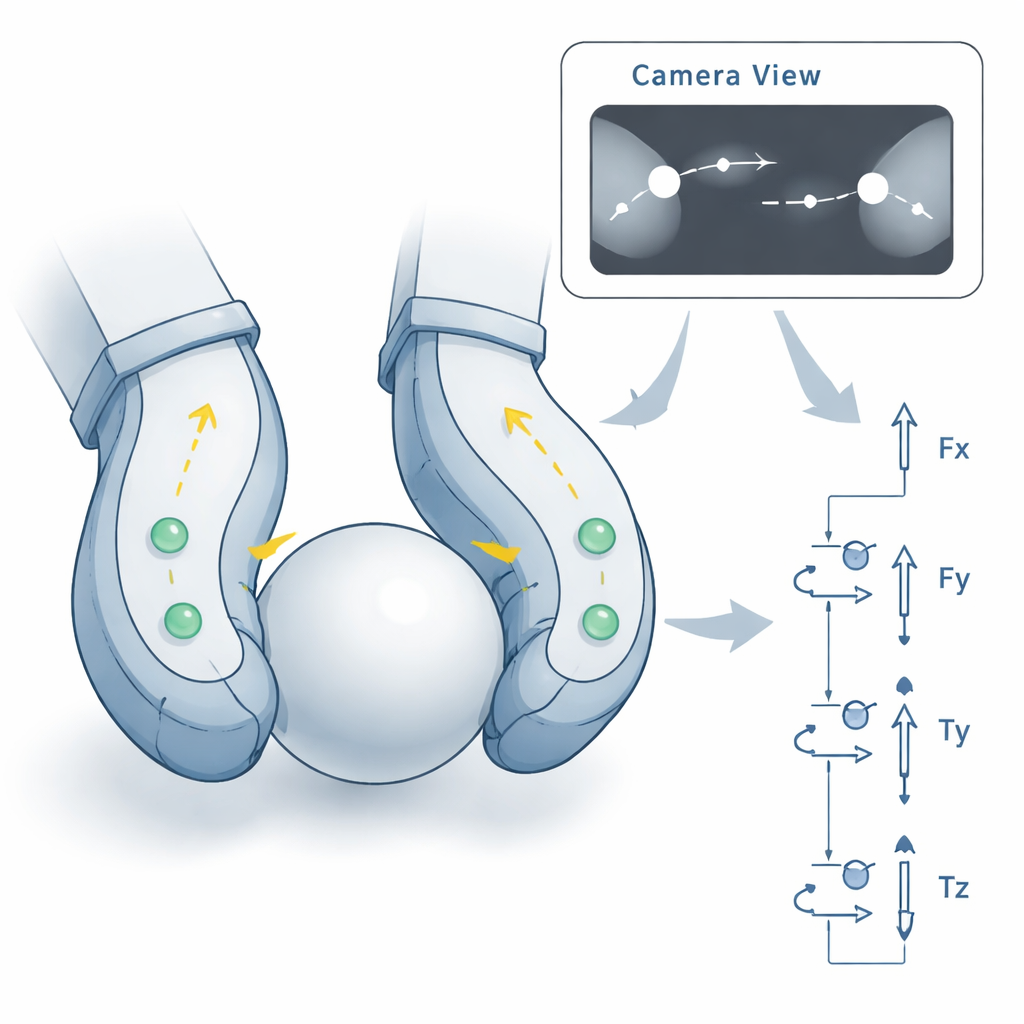
ה‑Seezer הוא מאחז רובוטי רך וגמיש שאצבעותיו מתכופפות במקום להיסגר כפי שמתרחש בכלים מתכתיים. הרעיון המרכזי הוא לבנות כמעט את כל המרכיבים בחלק אחד על מדפסת תלת‑ממד צרכנית: חלק אצבע מונוליטי שמכיל מפרקים גמישים, צורת קצוות אצבעות המותאמת למשימה ומסמנים קטנים מובנים. מודול האצבע הזה מחליק על יחידת מנוע קומפקטית שמכילה מצלמה מיניאטורית ותאורה. כאשר המנוע מסובב גלגלת תולעת, המפרקים הגמישים כופפים והאצבעות נסגרות סביב האובייקט, בעוד המצלמה צופה בקצוות האצבעות ובחלל מול המאחז.

קריאת כוח מתוך כיפוף האצבעות
במקום לשלב חוטים, מדדי עיוות או כריות לחץ בתוך האצבעות, ה‑Seezer מצפה את הפנים במרקם חזותי עשיר במידע. בכל קצה אצבע יש מסמנים עגולים קטנים ("פידושיאלים") שמיקומם בתמונת המצלמה משתנה כאשר האצבע מתעוותת. התוכנה מזהה ומעקבת אחרי המסמנים בכל פריים. לאחר רצף כיול קצר, מודלים מתמטיים פשוטים לומדים כיצד שינויים במיקום המסמנים מתייחסים לכוחות הדחיפה והמשיכה המופעלים על כל קצה אצבע. בשילוב של שלושת כוחות קצות האצבעות עם פיזיקה בסיסית, המערכת מעריכה את הכוחות והסתלסלות הכוללת הפועלים על המאחז בשש מערכות צירים, וכן את כוח הכיווץ בין האצבעות.
כמה טוב הוא "מרגיש" כוחות
כדי לבחון עד כמה חישה המבוססת על מצלמה מדויקת, המחברים השוו את הערכות ה‑Seezer לקריאות של חיישן כוח/מומנט מסחרי בעל דיוק גבוה בסביבה ניסויית מבוקר. בגרסה אחת של עיצוב האצבע (קצוות מוצקים יותר), המאחז מדד כוחות אחיזה עד כ‑1.1 ניוטון עם שגיאות אופייניות בין 8% ל‑17%, וכוחות ומומנטים בשש מערכות עם שגיאות בעיקר בין 8% ל‑24%. גרסה עם קצה אצבע רך יותר וויתרה על כושר הכח המרבי לטובת רגישות גדולה יותר — נמדדו כוחות קטנים יותר אך עם אחוזי שגיאה דומים. באופן משמעותי, המודלים דרשו רק 31 עד 141 נקודות כיול — הרבה פחות מהאלפי התמונות שנדרשות לעתים בשיטות למידה עמוקה העובדות על פריימים מלאים.
מגלגלי שיניים זעירים ועד פירות רכים
שתי דוגמאות הדגמה ממחישות מה המאחז יכול לעשות בשטח. באחת, ה‑Seezer חזר על פעולה של בחירת גלגלי שיניים מודפסים תלת‑ממדית מסגסוגות, העברתם והחזרתם על צירים, כשהמצלמה הפנימית משמשת גם ליישור חריץ המנעול עם הציר וגם למעקב אחר תנועת האצבעות. זה מדמה עבודות הרכבה עדינות במרחבים צפופים. בדוגמה נוספת, המאחז קצץ גידולי אדומים מהגבעולים שלהם. המערכת עקבה בזמן אמת אחרי כח האחיזה המוערך שלה והפסיקה לסגור ברגע שהושג סף כוח שנקבע מראש, כך שהפירות נקטפו בלי להתרסק. שתי הדגמות פעלו על אלקטרוניקה זולה והראו שעיצוב אחד יכול לטפל בעצמים קשיחים ורכים בקנה מידה של כמה מילימטרים.
אתגרים ושימושים עתידיים
ה‑Seezer הוא עדיין הוכחת־קונספט ויש לו מגבלות. מעקב המסמנים עובד הכי טוב בסצנות יציבות ובתאורה טובה ורקעם נקי; שינויי תאורה, משטחים מבריקים ותנועות מורכבות עלולים לגרום לשגיאות מעקב. קצב הפריימים הצנוע של המצלמה מגביל גם את קצב התגובה של המערכת לבקרת כח הדוקה או למשוב מישושי עשיר. חומרי האצבע עלולים להתעייף או לשנות את התנהגותם בשימוש ממושך, והצוות טרם בדק שיטתית ביצועים לאורך תקופות ארוכות. המחברים טוענים שאלגוריתמי מעקב עמידים יותר או שילוב החומרה שלהם עם מערכי חישוב כוח מבוססי למידה עמוקה יכולים לשפר דיוק ואמינות, בעוד שהתקדמות בהדפסת תלת‑ממד עשויה לאפשר מיקרו‑מיזעור נוסף ואצבעות מתכלות שעוברות סטריליזציה לשימוש כירורגי או מעבדתי.
מה זה אומר עבור רובוטיקה יומיומית
במילים פשוטות, עבודה זו מראה שיד רובוטית קטנה וזולה יכולה גם לראות וגם להרגיש על‑ידי צפייה בכיפוף אצבעותיה הרכות. עם מעט נתוני כיול וחלקים בשוק החופשי, ה‑Seezer מעריך עד כמה הוא לוחץ ואילו כוחות ומומנטים פועלים, במידה המספיקה למשימות טיפול עדין. אם יוחזרו לעסקיות העמידות, אותה שיטה עשויה לסייע לרובוטים עתידיים לטפל בפריטים קטנים ורגישים—כגון מכשירים רפואיים, אלקטרוניקה, פירות או אפילו רקמות בניתוחים מינימלית פולשניים—בלי חיישנים מגושמים או חומרה מסובכת, ולהביא מגע רגיש למקומות שבהם המרחב והתקציב מוגבלים.
ציטוט: Duverney, C., Gerig, N., Hüls, D. et al. Affordable 3D-printed miniature robotic gripper with integrated camera for vision-based force and torque sensing. npj Robot 4, 10 (2026). https://doi.org/10.1038/s44182-026-00075-2
מילות מפתח: מצמד רובוטי רך, חישה מבוססת ראייה של כוח, רובוטיקה מודפסת בתלת‑ממד, מניפולציה מוקטנת, משוב עצבי‑מישושי