Clear Sky Science · he
קידום הרובוטיקה הרכה: התקדמות אחרונה בפעילים מדיאלקטריים אלסטומריים ונוזליים
רובוטים רכים שנעים יותר כמו שרירים
דמיינו רובוט שיכול לחבק ילד בבטחה, להיחלץ דרך הריסות בבניין קרוס, או לעסות בעדינות לב כושל. כדי לבצע משימות כאלה, המכונות חייבות להתכופף ולהתמתח כמו רקמות חיות, לא לרעש כמו מתכת. מאמר סקירה זה מסביר כיצד מחלקה חדשה של "שרירים" חשמליים רכים — עשויים ממוצקים וגזילים גמישים — מקרבת את החזון הזה למציאות, ואילו אתגרים נשארים לפני שהם יצאו מהמעבדה וייכנסו לחיי היומיום.
ממנועים קשי־ממד לשרירים חשמליים רכים
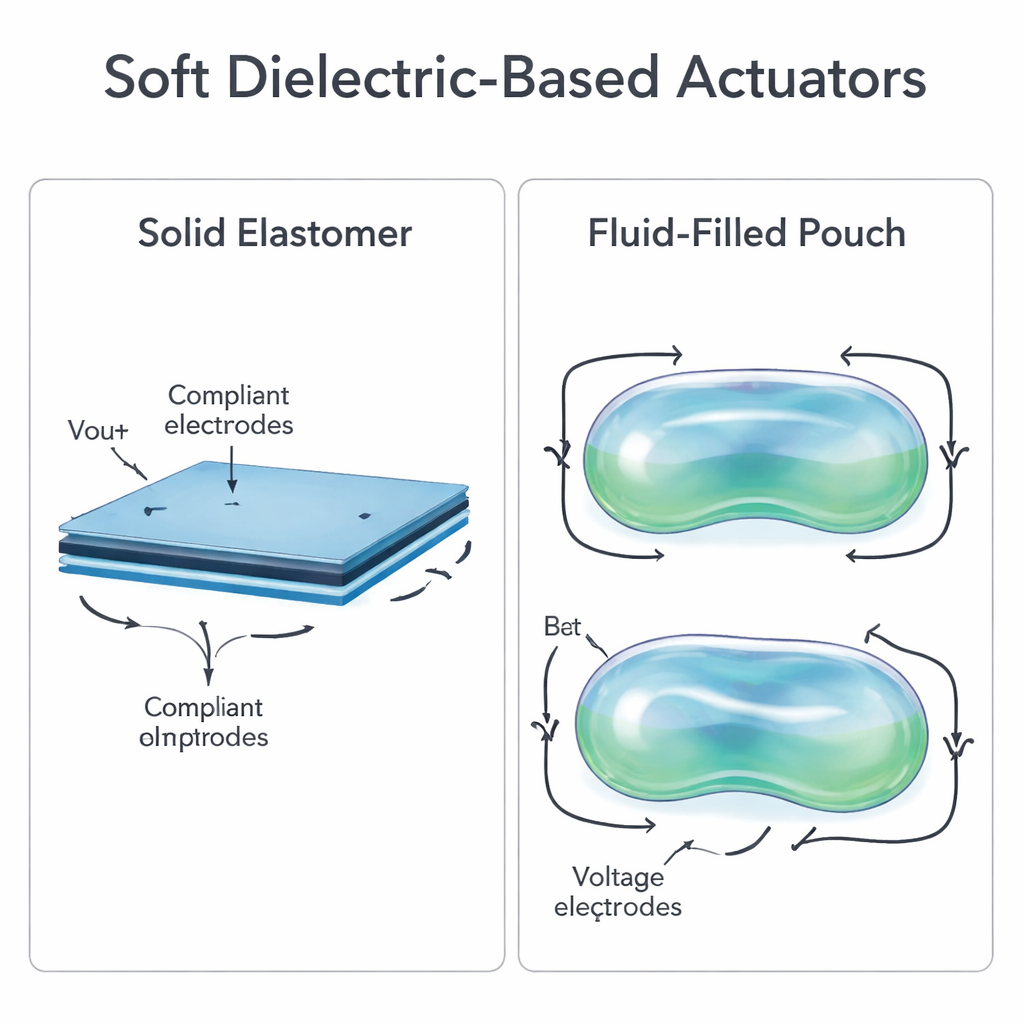
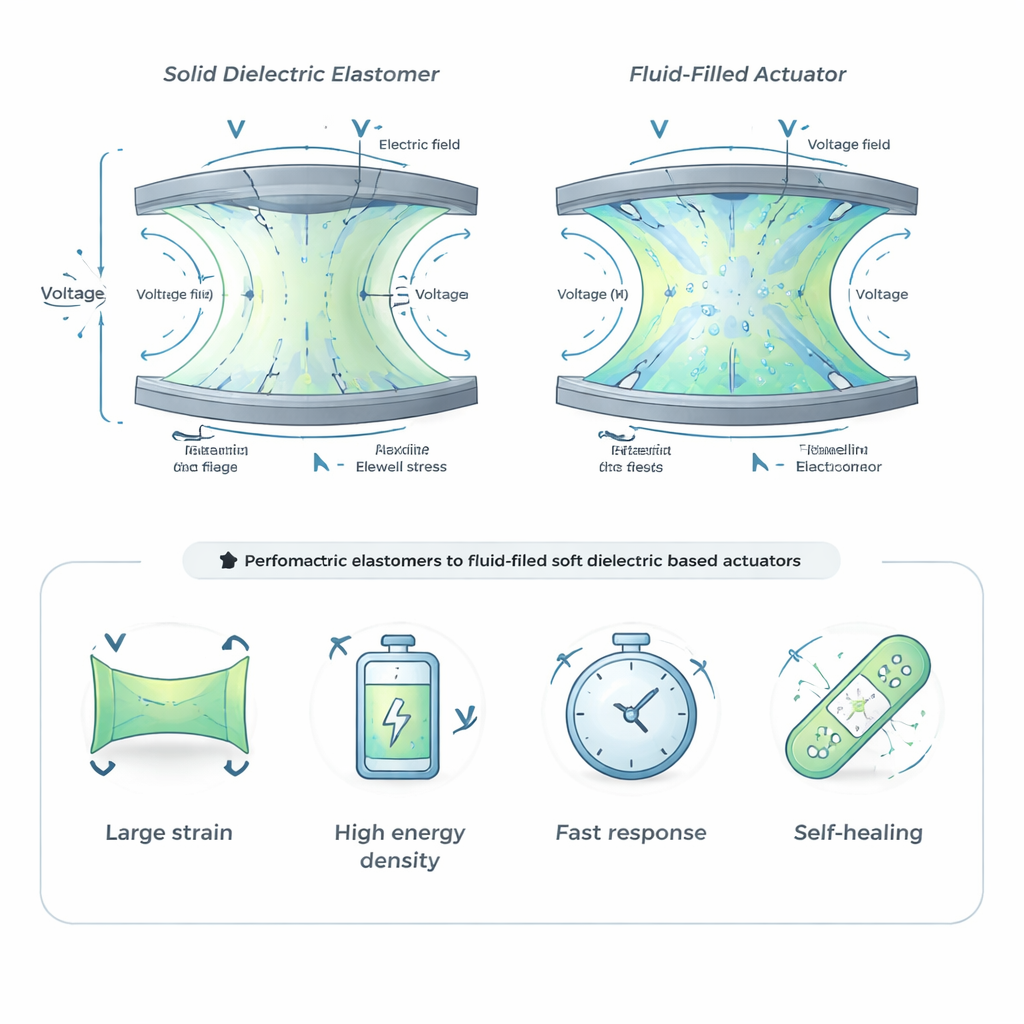
רוב הרובוטים התעשייתיים מסתמכים על מנועים כבדים וקשים עם גלגלי שיניים. הם חזקים ומדויקים, אך גם יקרים, שבירים, ומסוכנים בסביבת אנשים. רובוטים רכים, הבנויים מחומרים אלסטיים הדומים לכלי אפייה מסיליקון או לגומי, מחליפים כוח גס בעדינות, יכולת הסתגלות ועמידות. המוקד של מאמר זה הוא על פעילים רכים המונעים על ידי חשמל: פעילים מדיאלקטריים אלסטומריים (DEAs), שמשתמשים בשכבת גומי מוצקה, ופעילים מדיאלקטריים נוזליים (DFAs), שמשתמשים בנוזל מבודד חשמלית המאוחסן במעטפה גמישה. בשני המקרים, החלת משרן בין שתי אלקטרודות גמישות לוחצת על החומר באמצעות כוחות אלקטרוסטטיים והופכת אנרגיה חשמלית ישירות לתנועה עם עיוותים גדולים, צפיפות אנרגיה גבוהה ותגובה מהירה.
כיצד החומרים מפעילים את ה"שרירים"
כדי להתנהג כמו שרירים שימושיים, המכשירים האלה זקוקים לחומרים מאוד מסוימים. ב‑DEAs, גיליון הגומי המרכזי חייב להיות רך מאוד כדי להימתח בקלות, ובו־זמנית לעמוד בשדות חשמליים גבוהים מבלי לקרוע או לקצר חשמלית. חוקרים מווסתים את האיזון הזה בעזרת שתי אסטרטגיות עיקריות. אחת היא לעצב פולימרים חדשים — מאקרילטים, סיליקונים ופוליאוריאתנים ועד קופולימרים חסונים יותר — המשלבים קבוצות כימיות פולריות רבות (המגבירות את התגובה החשמלית) ברשתות גמישות בעלות קשיחות נמוכה. השנייה היא ליצור מרכיבי־מורכב על ידי ערבוב חלקיקים זעירים או נוזלים שמעלים את יכולת אחסון האנרגיה החשמלית של החומר. חשיבה דומה מלווה עיצוב DFA: מהנדסים בוחרים בשמנים ונוזלים דיאלקטריים אחרים עם ויסקוזיות, יציבות והתאמה נכונות למעטפות פלסטיק או סיליקון דקיקות, כך שמשרן יכול להזיז במהירות את הנוזל ליצירת בליטות, פעימות ורעידות ללא דליפות או התמוססות כימית.
בניית והנעת פעילים רכים בקנה מידה
הפיכת החומרים החכמים האלה למכשירים אמינים היא אתגר הנדסי בפני עצמו. ייצור מסורתי לרוב כולל שלבים ידניים מתישים: מתיחת סרטים דקים על מסגרות, צביעה או הדפסת אלקטרודות גמישות, ערימת שכבות, ובמקרה של DFAs — הזרקת נוזל ואיטום המעטפה. המאמר סוקר נתיבי ייצור חדשים כגון הדפסת תזת דיו והדפסת מסכי משי, דחיסה של שרירים בצורת סיבים, והדפסת תלת־ממד רב־חומרית שיכולה להניח אלקטרודות ודיאלקטרים בפס אחד. הוא גם מסביר כיצד צורות שונות מייצרות תנועות שונות: ריבועים שטוחים שמתרחבים בשטח, כיפות שקופצות כלפי מעלה, גלילים מגולגלים שמתכווצים לאורך, ומבנים שמתעקמים או רועדים. מאחר שחומרים אלה יכולים להזדקן, לדלוף או להיכשל בהתקף חשמלי, המחברים מסכמים מחקרי חיים ותבניות כשל נפוצות ומדגישים את המאמץ לעבר עיצובים המתאחים את עצמם שיכולים להתאושש לאחר ניצוץ או ניקוב.
בקרה חכמה ושימושים מתהווים
כמו שרירים טבעיים, יש לשלוט בפעילים הרכים. סכמות פתוחות פשוטות מספקות דפוס מתח בלבד, אך זה יכול לסטות כשהחומר מתחמם או מתנודד. גישות מתקדמות יותר משלבות חיישנים — או משתמשות באותות החשמליים של הפעיל עצמו — למדידת עיוות, כוח או רעד בזמן אמת ולכוונון אות ההנעה בהתאם. חוקרים מתנסים כעת בבקרי למידת מכונה ולמידת חיזוק שיכולים להתמודד עם התנהגות לא־ליניארית ותלויית היסטוריה של חומרים רכים. מבחינת יישומים, המאמר סוקר נוף רחב: שרירים מלאכותיים שמרימים פעמים רבות ממשקלם, רובוטים המדמים דגים או חרקים ששוחים או עפים, רצועות מגע לבישות ופדים לקצות אצבעות המספקים משוב מישוש ריאליסטי, עדשות זום ועורות מעצבי־אור בהשראת תמנון ועין האדם, משטחים שמשנים צורה, ומכשירים רפואיים רעיוניים שעשויים יום אחד לסייע ללב כושל או לפנים משותקות.
מה עוד מפריד בין הדגמות מעבדה לרובוטים בעולם האמיתי
למרות ההבטחה, ה"שרירים" החשמליים הללו עדיין עומדים בפני מחסומים לפני שיוכלו להניע בבטחה עוזרים ביתיים, שתלים רפואיים או מוצרי לבישה המוניים. רבים דורשים מתחים ברמת הקילובולט, מה שמסבך את נושאי הבטיחות והאלקטרוניקה. חומרים שפועלים נהדר במבחנים קצרים עלולים להתקשח, להתייבש או להיכשל לאחר מיליוני מחזורים. הייצור לעתים קרובות איטי מדי ולא עקבי עבור ייצור בקנה מידה גדול. וקיימת עדיין בעיית המיחזור או ההתפרקות הביולוגית של רוב הפולימרים הנוכחיים. המחברים טוענים שההתקדמות תישען על תכנון משותף על פני קני מידה: חומרים רכים חדשים שמשלבים קשיחות נמוכה, תגובה חשמלית גבוהה, עמידות ואפילו יכולת התאוששות עצמית; ייצור ובדיקה אוטומטיים ומונחי‑נתונים; ומערכות בקרה המנצלות חישה מובנית ו‑AI קל משקל. יחד, ההתקדמות הללו יכולה להעניק לרובוטים במחר שרירים שלא רק יהיו חזקים ומהירים, אלא גם בטוחים, מותאמים וברי־קיימא.
ציטוט: Molla, M.H.O.R., Chen, J. & Xu, C. Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators. npj Robot 4, 17 (2026). https://doi.org/10.1038/s44182-026-00074-3
מילות מפתח: רובוטיקה רכה, פעילים מדיאלקטריים אלסטומריים, פעילים מדיאלקטריים נוזליים, שרירים מלאכותיים, ממשקי הפטיק