Clear Sky Science · he
בקרת משחק ניבוית חיזויית לעזרה אינטראקטיבית מותאמת וממוקדת
רובוטים שמרגישים כמו שותפי אימון טובים
דמיינו שותף אימון או פיזיותרפיסט שתמיד יודע מתי לעזור לכם להרים, מתי לתת לכם להיאבק קצת וכמה בחוזקה אתם מתכננים לזוז בהמשך. המאמר הזה מראה כיצד להעניק לרובוטים במגע—כמו אקסוסקלטונים המשמשים בשיקום או במפעלי יצור—מינון אינטואיציה דומה. על ידי "ניחוש" מתמטי של הכוונת התנועה של האדם לשנייה או שתיים הבאות, הרובוט יכול לחלוק מאמץ באופן חלק, להפחית עייפות ולכוון בעדינות כיצד אנשים נעים ולומדים.
מדוע שיתוף מאמץ עם רובוטים קשה
כששני גופים מחוברים פיזית—רובוט שעוזר לאדם להזיז איבר או לשאת חפץ כבד—שניהם דוחפים ומגיבים ללא הפסקה. בקרי רובוט מסורתיים מתעלמים ברובם ממה שהאדם מתכנן; הם רודפים אחר מדדי ביצוע כמו דיוק או חיסכון באנרגיה. זה עלול לגרום לרובוט להיות נוקשה וממשלתי מדי, או להפך—פסיבי ולא תורם. שותפים אנושיים אמיתיים מתפקדים טוב יותר: הם חשים איך השני נע, מתאימים את עצמם ליכולותיו ומעודדים התנהגויות שונות, מרגיעה ועד מאמץ אינטנסיבי. המחברים טוענים שכדי לקרב רובוטים לאינטראקציה מסוג זה, על הרובוט למודל במפורש כיצד האדם מתכנן תנועות וכמה מאמץ הוא מוכן להשקיע.
מבט תורת משחקים על אינטראקציה אדם–רובוט
החוקרים בונים על תורת המשחקים—המתמטיקה של אינטראקציה אסטרטגית—לטפל באדם וברובוט כשני "שחקנים" החולקים את אותה המשימה. לכל אחד יש מטרות משלו: האדם רוצה לעקוב אחרי התנועה הרצויה תוך השקעת מאמץ מינימלית, והרובוט רוצה לסייע בעקיבה תוך הפחתת מאמץ האדם. הדבר הקריטי הוא ששניהם מניחים תכנון לטווח קצר בלבד, חלון תכנון סופי של בערך שנייה עד שתיים, המשקף כיצד אנשים בדרך כלל מתכננים תנועות. בתוך חלון זה, הצוות גוזר נוסחה קומפקטית לאיזון נאש: דפוס מאוזן של כוחות שבו אף אחד מהצדדים לא יכול לשפר את תוצאתו בלי שהשני ישנה את ההתנהגות. איזון זה מגדיר כמה כל אחד צריך לדחוף בכל רגע.
לימוד הרובוט לקרוא כוונת אדם
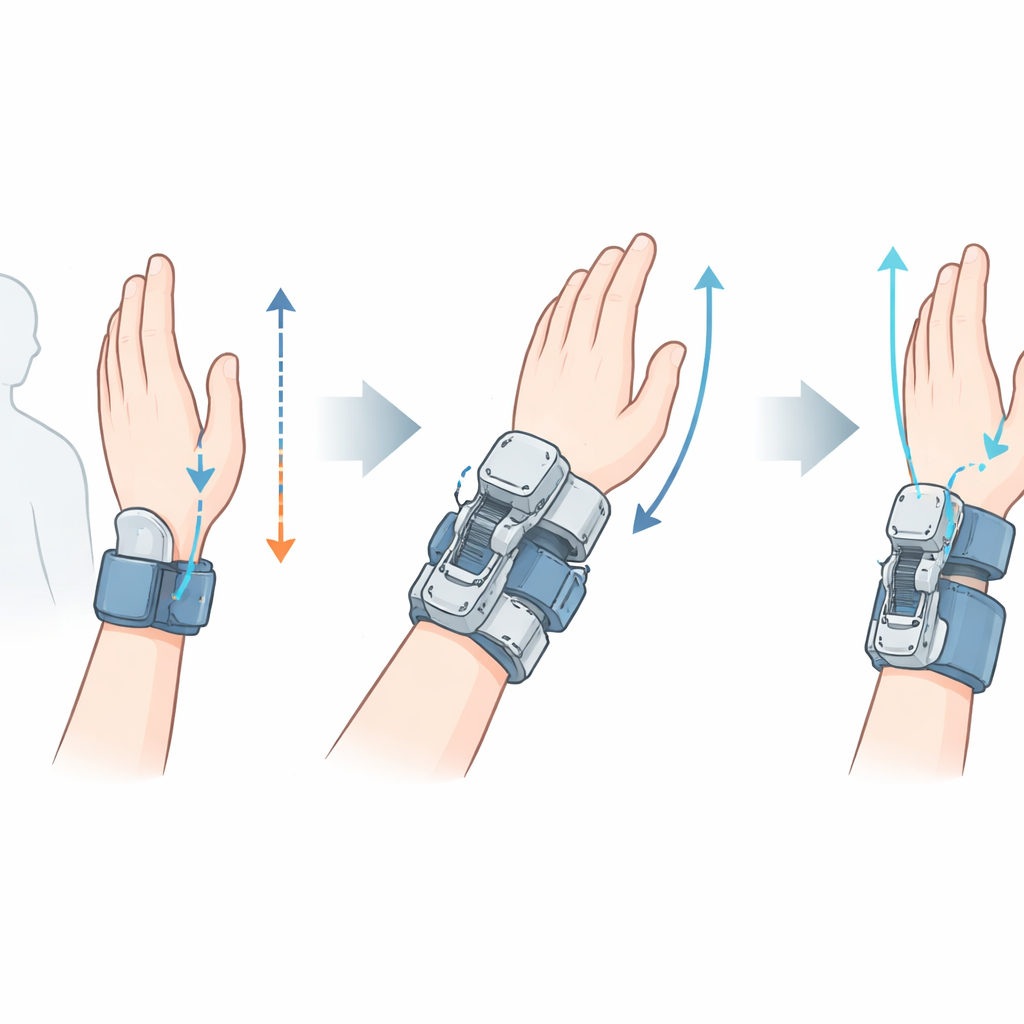
כדי שהרובוט ישחק את "משחק התנועה" הזה, עליו קודם כל להכיר עד כמה האדם מוסמך לדיוק מול המאמץ—העדפה נסתרת שמשתנה מאדם לאדם ואפילו בזמן. המחברים פותרים זאת בגישה משחקית הפוכה. כאשר האדם זז, חיישנים מודדים את זווית המפרק ואת המומנט שהוא מפיק. הבקר אז מחפש שוב ושוב את קבוצת העדפות האדם שהכי מסבירה את היסטוריית התנועה והכוחות האחרונה. עם העדפות אלה, הוא חוזה כיצד האדם צפוי לפעול בחזון הקצר הקרוב ומחשב את כוח הסיוע האופטימלי של הרובוט. כל זה פועל בזמן אמת על אקסוסקלטון פרק כף יד שעוזר לנבדקים לעקוב אחר יעד נייד בעודם מניעים את ידם.
אנשים ורובוטים לומדים לתאם
הצוות בדק את הבקר שלהם עם שלושים מבוגרים בריאים בשלושה ניסויים. בניסוי הראשון, הורו לאנשים לעבור בין עקיבה פעילה אחרי היעד לבין היותם פסיביים. הבקר התאים במהירות את ההערכה הפנימית שלו כמה האדם דואג לדיוק, עליה במהלך שלבים פעילים וירידה כמעט לאפס כשהירגעו. בניסוי השני, המשתתפים חילפו בין ניסויים עם ובלי סיוע רובוטי. עם הבקר החדש, הרובוט קיצר את מאמץ המפרק ופעילות השריר של האדם, תוך שיפור הדיוק בעקיבה. לאחר חזרות, דפוס האינטראקציה של כל אדם התייצב לאיזון אישי ויציב, והמתאם בין כוחות האדם והרובוט עלה—עדות להבנה הדדית גוברת. בניסוי השלישי, החוקרים הוסיפו פרמטר-על אחד לסיוע, מטה-פרמטר שמזיז עד כמה הרובוט מנסה למזער את מאמץ האדם. סיבוב הידית הזו שינה בצורה חלקה את כמות המאמץ שהאנשים בחרו להשקיע, מבלי לפגוע בביצוע המשימה.
כוונון ההתנהגות באמצעות כפתור אחד
מטה-הפרמטר של הסיוע מאפשר למעצביי מערכת לכסות ספקטרום של סגנונות אינטראקציה באמצעות בקרה אחת: מתחילת כמעט ללא עזרה, דרך חלוקת מאמץ שווה, ועד לתמיכה כמעט מלאה שבה הרובוט מוביל והאדם יכול להירגע. בהגדרות ביניים, אנשים נטו לתאם בצורה הטובה ביותר עם הרובוט, כשכל אחד נושא בערך חצי מהעומס. דפוס העדפות האדם הממון שוחזר באופן עקבי עבור כל אדם ברמות סיוע שונות—למעט כאשר הרובוט עשה כמעט הכל, אז ההתנהגויות הפכו אחידות יותר מאחר שאנשים הפסיקו במידה רבה להישתתף. זה מראה שהרובוט מסוגל גם לחשוף סגנונות שליטה אישיים וגם לדחוף אותם בעדינות, למשל על ידי בקשה מהמשתמשים לעשות יותר בשלב אחד של האימון ופחות בשלב אחר.
מה משמעות הדבר לשיקום ולעבודה
לקורא הלא מקצועי, המסר המרכזי הוא שבקר זה גורם לרובוטים להתנהג יותר כמו שותפים חכמים ופחות כמכונות קשיחות. על ידי חיזוי כיצד אנו מתכוונים לזוז וכיוון כמה הם עוזרים, רובוטים יכולים להקטין את המאמץ שלנו כשצריך, לעודד אותנו לעבוד חזק יותר כשזה מועיל, ולשמור על תנועות מדויקות ויציבות. אותו מסגרת מתמטית ניתנת לכוונון לשיקום—העברת מאמץ בהדרגה מהרובוט למטופל—או לייצור משותף, שבו אנשים ורובוטים חולקים עומסים בבטחה וביעילות. במהותה, המחקר מראה שאנשים מסתגלים באופן טבעי לרובוט "שמשחק את אותו המשחק" שהם משחקים, וכך נפתחת הדרך לצורות עזרה אינטראקטיביות יותר מותאמות וממוקדות.
ציטוט: Hafs, A., Farr, A., Verdel, D. et al. Model predictive game control for personalized and targeted interactive assistance. Commun Eng 5, 57 (2026). https://doi.org/10.1038/s44172-026-00605-8
מילות מפתח: אינטראקציה בין אדם לרובוט, סיוע באמצעות אקסוסקלטון, בקרת תורת המשחקים, שיקום מוטורי, שליטה משותפת