Clear Sky Science · he
מדידות ובלי-ומדופלר בלייזר במהירויות גבוהות על רזונאטור יתד בטופולוגיית בימורף מאלומיניום ניטריד
מדוע דחיפה של מכונות זעירות למהירויות קיצוניות חשובה
טלפונים מודרניים, רחפנים וכלי ניווט נשענים על חלקים מכניים זעירים שמזהים תנועות וסיבובים. התקנים מיקרוסקופיים אלה, שנקראים חיישני MEMS, בדרך כלל פועלים בעדינות כדי להישאר צפויים וקלים לשליטה. בעבודה הזו שאלו החוקרים שאלה נועזת: מה קורה אם נדחוף אחת מהמבנים הרוטטים הקטנים האלה כמעט עד למה שהחומרים מאפשרים, והאם זה יכול להפוך ניווט עתידי לרגיש ומדויק יותר?
קרשים רוטטים זעירים כחיישני תנועה
רבים מהחיישנים המתקדמים למעקב תנועה משתמשים במסת רטט כדי לזהות סיבוב. כאשר המסה זזה במהירות רבה קדימה ואחורה, כל סיבוב של המכשיר יוצר כוח צידי חזק יותר, מה שמגביר את הרגישות של החיישן. החיישנים המסחריים של היום שומרים על מהירויות רטט צנועות, מתחת לכ-5 מטרים לשנייה, על מנת להבטיח התנהגות פשוטה וליניארית. הצוות מאחורי המחקר הזה התכוון לשבור את המחסום הזה, ולחקור עד כמה במהירות יכול לקרב רטט מיקרו-סקלי להתרחש בבטחה ומהן ההתנהגויות החדשות שיתגלו כאשר הוא מונע הרבה מעבר לאזור הנוחות הרגיל.
קרש בצורת יתד שנבנה למהירויות גבוהות
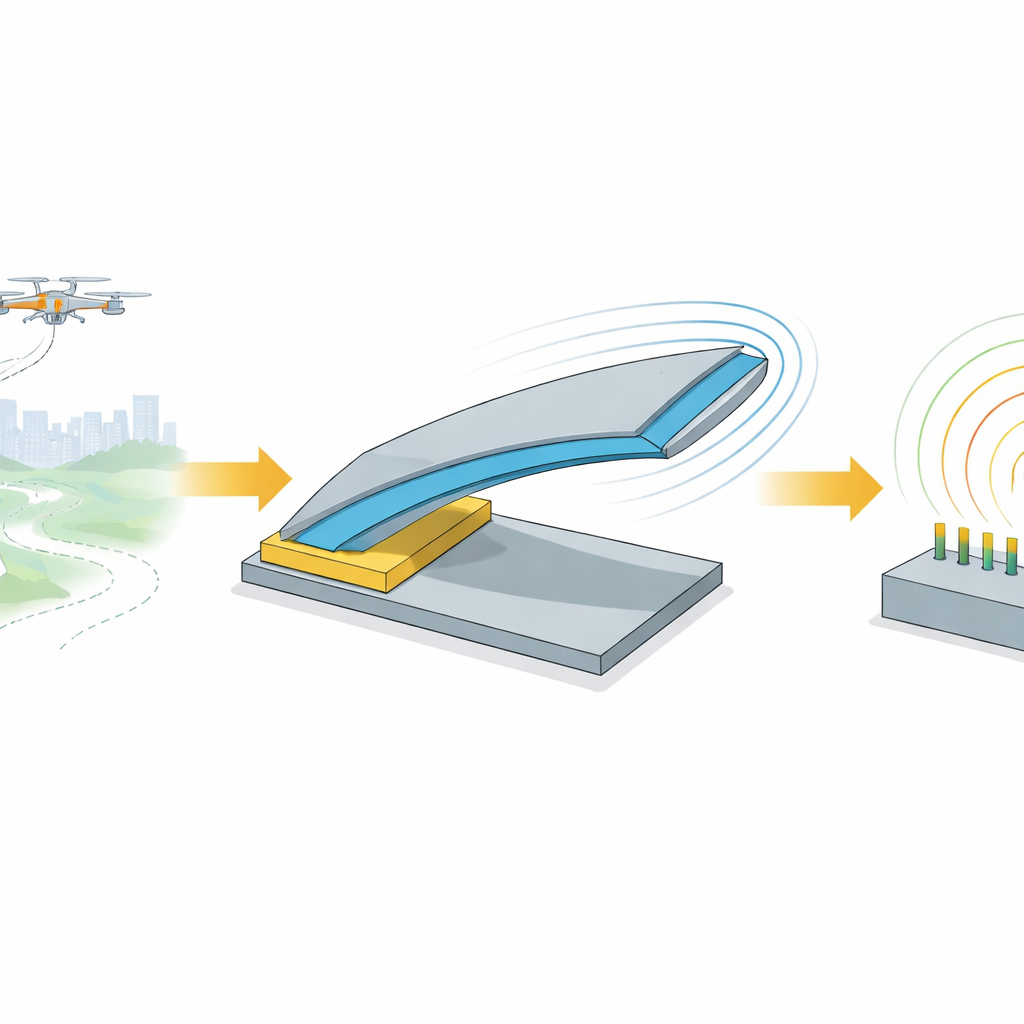
החוקרים השתמשו בקרש דק בצורת יתד עשוי מאלומיניום ניטריד, חומר שמתעקם כאשר מוחל עליו מתח חשמלי. עובי הקרש הוא כ-מיקרומטר אחד ואורכו כחצי מ״מ, מקובע בקצה אחד וחופשי בקצה השני כמו קרש קפיצה. שכבות מתכת מעל ומתחת לחומר הפעיל איפשרו לצוות לכופף את הקרש מחוץ למישור השבב כאשר הם החילו אותות מתח גבוהים. מבנה פשוט זה, מצטמצם לאורך האורך שלו ומורכב כולו מחומר פעיל, תוכנן במקור למטרה אחרת אך התברר כמקרה מבחן מצוין להשגת מהירויות קצה קיצוניות.
מדידת תנועה קיצונית בעזרת אור לייזר
כדי לעקוב אחר מהירות תנועת קצה הקרש השתמש הצוות בלו-דופלר בלייזר, טכניקה שמאירה נקודה ממוקדת של לייזר על המשטח הרוטט וקוראת את המהירות מתוך שינויים זעירים באור המוחזר. הם התקינו את השבב בתוך תא ואקום קטן כדי להפחית את הגרר האווירתי והניעו את הקרש באמצעות אותות חשמליים חזקים שסרקו את תהודה העיקרית שלו בסמוך ל-1.81 מגהרץ. בעיצוב מדויק של אותות הנהיגה יכלו גם להגן על המכשור מהתחממות יתר וגם לגלות כיצד תגובת המערכת משתנה כאשר הגדילו את המניע מרך לקיצוני.
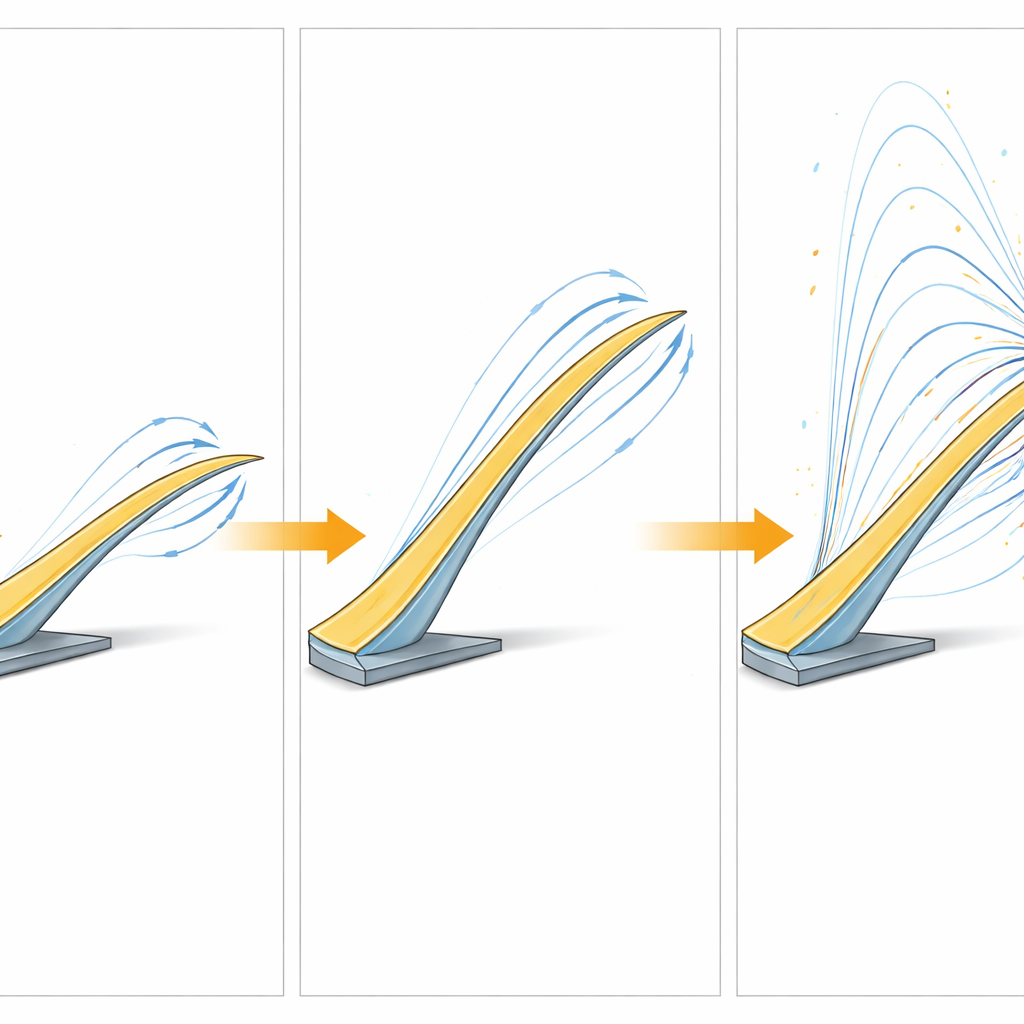
חצייה לתחום לא-ליניארי פרוע
ברמות נהיגה נמוכות התנהג הקרש כפי שמהנדסים מעדיפים: תגובתו לשינוי תדר הייתה חלקה וסימטרית, וסריקות קדימה ואחורה נתנו את אותה תוצאה. כאשר הוחמר המתח, התנועה החלה לעקם את עצמה. שיא התהודה התעקם והתרחב, והתגובה בסריקות מעלה ומטה כבר לא תאמה זו את זו — סמנים טיפוסיים להתנהגות לא-ליניארית. ברמות הנהיגה הגבוהות ביותר בתוך ואקום, מהירות הקצה הגיעה לכ-50 מטר לשנייה — בערך פי עשר מהדווח עבור מכשירים דומים — תוך הופעת קפיצות פתאומיות במשרעת ולולאות היסטרזיס כאשר נחקרו חוזק ויתר התדרים של הנהיגה. סימולציות נומריות באמצעות מודל התנודד לא-ליניארי סטנדרטי התאימו בקירוב לדפוסים אלה, ואישרו שהפיזיקה הבסיסית עמדה בחוקי לא-ליניאריות מובנים היטב אך נדירים לחקירה.
כמה קרוב לשבירה זה כבר יותר מדי?
דחיפת קרש מיקרוסקופי למהירויות כאלה מעלה שאלות ברורות לגבי כישלון. החוקרים העריכו הן את שדה החשמל בתוך האלומיניום ניטריד והן את המתיחה המכנית בקרש בעת תנועת השיא. הם מצאו שהמכשיר פעל בכ-90% מגבול הפריצה החשמלי שלו וכחצי בלבד מהמתיחה השבירה המכנית הצפויה. במילים אחרות, הניסוי קירב את הרזונאטור לשני הגבולות החשמליים והמכניים שלו מבלי להרוס אותו בפועל, וסיפק גבול עליון ריאלי למהירות שימושית בעיצוב זה.
מה זה אומר למכשירי ניווט עתידיים
בהדגמה שקרש זעיר ברמת שבב יכול לרטוט במהירות של 50 מטר לשנייה תוך שמירה על שליטה, עבודה זו מראה שחיישני MEMS לא חייבים להישאר מוגבלים לפעולה עדינה וליניארית. במקום זאת, המעצב יכול לשקול פעולה קרובה לקצוות גבולות החומר כדי לשחרר רגישות גבוהה הרבה יותר לחיישני inertial המיועדים לסביבות תובעניות כמו ניווט ללא GPS. אף על פי שהמכשיר הזה עצמו לא אומת כמוצר סופי ועדיין חסר תכונות כמו חישה מובנית בכיוון שני, הוא מספק הוכחת עקרון ברורה: ניהול זהיר של התנהגות לא-ליניארית יכול להפוך רטט קיצוני מבעיה לכלי רב-עוצמה לג׳יירוסקופים ומאיצים זעירים בדור הבא.
ציטוט: Liu, Z., Niu, X., Vatankhah, E. et al. High-velocity laser Doppler vibrometry measurements on an aluminum nitride bimorph wedge resonator. Commun Eng 5, 48 (2026). https://doi.org/10.1038/s44172-026-00595-7
מילות מפתח: רזונאטור MEMS, חיישן inertial, לו-דופלר בלייזר, דינמיקה לא-ליניארית, אלומיניום ניטריד