Clear Sky Science · he
בקרת עצמאית מחומרה לדימוי כבידה חלקית באמצעות מכשיר רובוטי עם 2 דרגות חופש
מדוע כבידה מופחתת על פני כדור הארץ חשובה
כשאדם מתכננים טיסות ארוכות יותר לירח ולמאדים, יש צורך דחוף להבין כיצד רמות כבידה בלתי שגרתיות ישפיעו על הגוף. ניסויים כאלה בחלל יקרים וספורים, לכן מדענים משתמשים במכונות ספינינג מיוחדות על פני כדור הארץ, הקרויות קלינוסטטים, כדי לדמות כבידה נמוכה על תאים ורקמות זעירות. מאמר זה מציג דרך חדשה לשלוט במכשיר כזה כך שיוכל לחקות באופן מהימן לא רק חוסר משקל, אלא גם את המשיכות החלשות של הירח, מאדים ואף רמות כבידה הקרובות לכדור הארץ—מבלי להיות קשור בחוזקה למנוע או חלק חומרה מסוים.
סובבים כדי לזייף כבידה
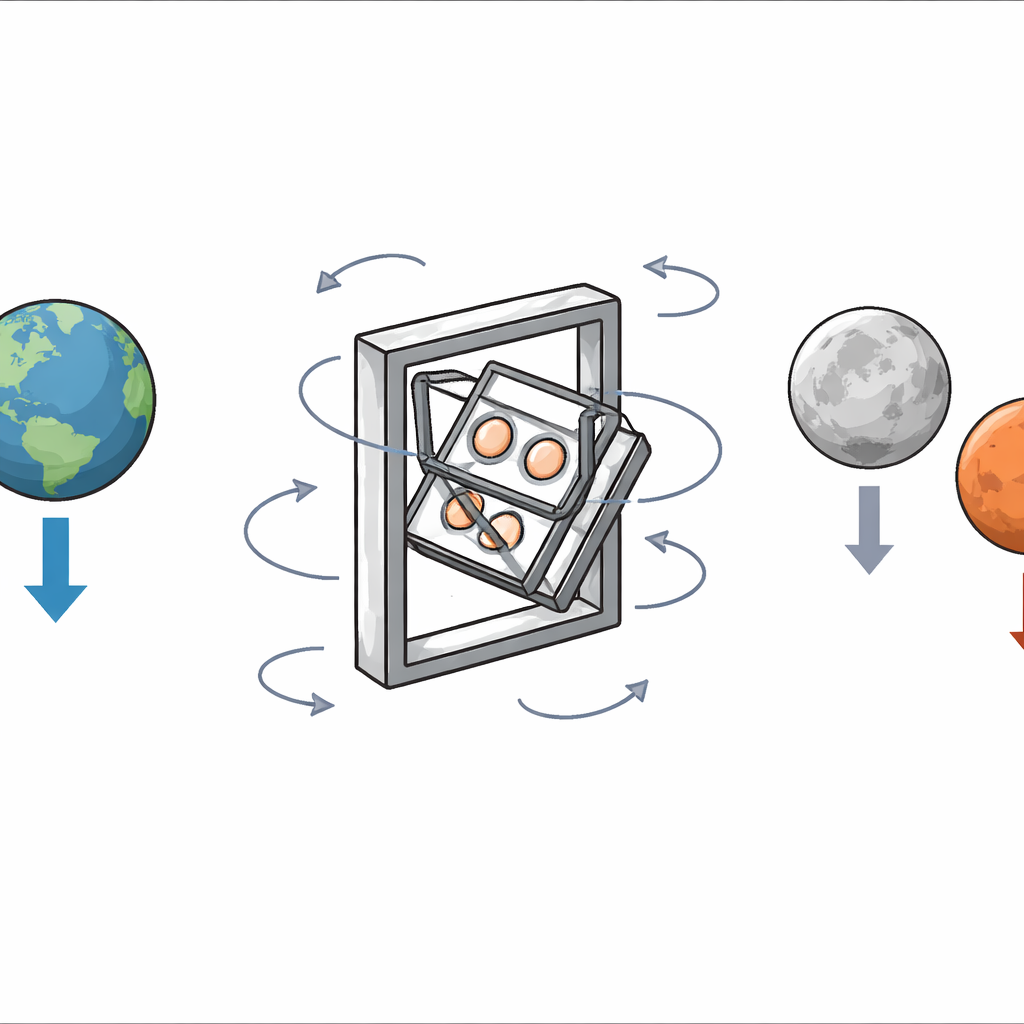
בסמוך לפני כדור הארץ, הכבידה פונה כמעט תמיד כלפי מטה. קלינוסטט תלת־ממדי לוקח דגימה קטנה—כגון תאים או אורגאנוידים בצלחת—ומסובב אותה לאט סביב שתי צירים מאונכים. מכיוון שהכיוון שבו הדגימה פונה משתנה כל הזמן, הכיוון שבו התאים "רואים" את הכבידה ממשיך להתחלף, ובמהלך הזמן אותם המשיכים מתמוצעים. כאשר הסיבובים מסודרים נכון, הממוצע בזמן של הכבידה יכול להתקרב לאפס, ובכך לחקות מיקרו‑כבידה כמו במסתובב. במשך שנים רבות רעיון פשוט זה שימש לחקירת אובדן שריר, החלשות עצם, שינויים במערכת החיסון ותופעות נוספות הדומות לחלל מבלי לעזוב את הקרקע.
ממצב חסר משקל לכבידה "כמו ירח"
לאחרונה הבינו החוקרים שלא מספיק לחקור רק חוסר משקל. אסטרונאוטים על הירח או מאדים יחיו בכבידה חלשה יותר, לא בחוסר מוחלט. כדי לגשר על הפער הזה הוצג רעיון של דימוי כבידה חלקית ממוצעת בזמן: במקום לגרום לממוצע המשיכה להיעלם, המכשיר שומר על כך שהכבידה תצביע לעיתים קרובות קצת יותר בכיוון אחד מאשר באחרים. הסטייה הזו יוצרת משיכה ממוצעת בין אפס לכבידת הארץ המלאה, ומאפשרת לחוקרים לחקות תנאים כמו 0.17 g על הירח או 0.38 g על מאדים. שיטות בקרתיות מוקדמות יכלו להשיג זאת, אך הן היו תלויות במידה רבה במנועים והמכניקה המדויקת, ולא יכלו לייצר כבידה חלקית גבוהה יותר מכ־0.44 g.
דרך חדשה לנווט את הספינר
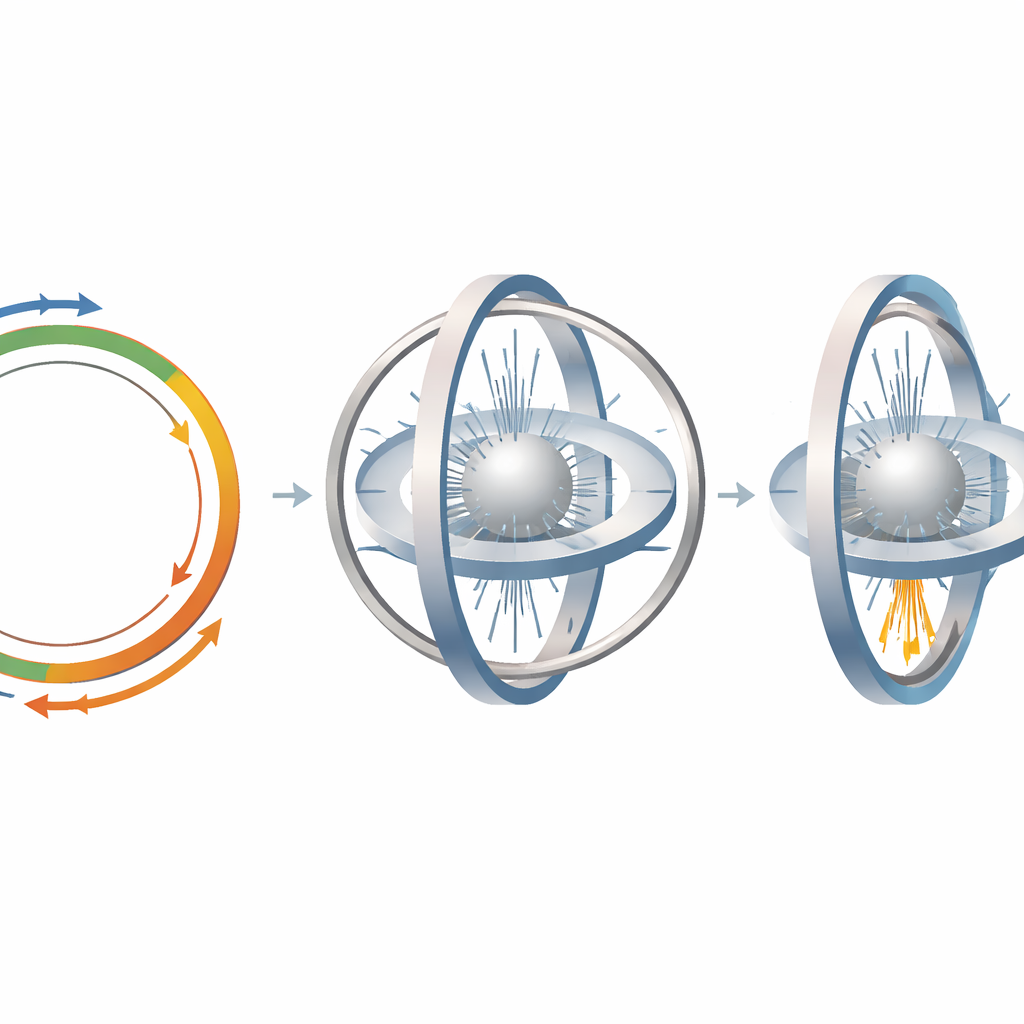
החדשנות המרכזית במחקר זה היא לשלוט במנוע החיצוני של הקלינוסטט על בסיס הזווית שלו, במקום על בסיס הזמן. שיטות קודמות קבעו במהירות כמה המנוע אמור להסתובב בכל רגע, אך חומרה אמיתית אינה עוקבת אחרי התוכנית הזו בדיוק: עיכובים קטנים ומגבלות המנוע גורמים לסטייה בזווית, וטעויות אלו מצטברות, מה שמכריח חוקרים להוסיף לולאות משוב נוספות המותאמות לכל מכשיר בודד. כאן, המחברים מעצבים מחדש את חוק הבקרה כך שהמהירות הזוויתית ניתנת ישירות כפונקציה של הזווית הנוכחית. שינוי שמצטייר קטן זה מקטין מאוד את גדילת השגיאות והופך את השיטה ללא תלויה במידה רבה בעוצמת המנוע או באינרציה. במקביל, המנוע הפנימי מונע בתבנית דמוית אקראית כך שהכבידה לא תעקוב אחר אותו מסלול שוב ושוב, מה שמשפר את האמינות הניסיונית.
לדחוף את הכבידה קרוב יותר לבית
באמצעות סימולציות מחשב, הצוות מיפוי כיצד פרמטר בקרת מרכזי, הנקרא α, משפיע על הכבידה הממוצעת הסופית. על ידי הגדלת α הם יכלו להעלות את הכבידה החלקית המדומה עד לכ־0.68 g—כבר הרבה יותר גבוה מהמגבלה הישנה של 0.44 g. כדי להתקדם עוד הם הציגו טריק של "זמן מנוחה": בכל פעם שהמסגרת החיצונית מגיעה לזווית שבה הכבידה מיושרת עם המשיכה הממוצעת הרצויה, המנוע נעצר לזמן קצר. במהלך ההפסקה הדגימה חווה משיכה יציבה בכיוון זה, מה שמחזק את ההטיה. הסימולציות הראו שהפסקות ארוכות יותר דוחפות את הכבידה היעילה קרוב יותר ל‑1 g של כדור הארץ, וניסויים אישרו ערכים עד כ־0.81 g עם סטייה של רק כ־1% מהתוצאות החזויות בטווח הדיוק הטוב ביותר.
בדיקת הירח, מאדים ומעבר להם
החוקרים בנו קלינוסטט בעל שתי צירים המונע על‑ידי מנועי סרבו מסחריים וניטרו את כיוון הכבידה באמצעות חיישן אינרציאלי המורכב במרכז. הם בדקו טווחי ערכי α וזמני מנוחה, ומדדו כמה מהר הכבידה הממוצעת התייצבה וכמה קרובים הניסויים היו לסימולציות. עבור ערכי α מתונים המקבילים ל־0.33–0.63 g, חוסר ההתאמה היה בדרך כלל סביב 1% או פחות. סימולציות וניסויים עבור תנאים דמויי ירח ודמויי מאדים הניבו משיכות ממוצעות בסמוך ל־0.17 g ו‑0.38 g, תוך שמירה על נתיבי כבידה משתנים מריצה לריצה. המחברים גם חקרו מגבלות מעשיות הנובעות מרזולוציית מנוע ועיכובי תגובה, והציעו הנחיות פשוטות לבחירת מפעילים ושוליים בטיחותיים כך שמעבדות אחרות יוכלו לשחזר רמות כבידה חלקיות מדויקות.
מה משמעות הדבר לבריאות בחלל בעתיד
במונחים פשוטים, עבודה זו הופכת מערכת ספינינג מורכבת ותלויה חומרה למדמה כבידה חלקית ליותר פלאג‑אנד‑פליי. על‑ידי קשירת מהירות המנוע לזווית והוספת עצירות מבוקרות, השיטה יכולה לחקות בצורה נאמנה טווח רחב של רמות כבידה, ממרחב העמוק עד ירח ומאדים וכיוון כדור הארץ, מבלי צורך בכיוון ידני מתמיד של לולאות בקרה. הגמישות הזו מקלה על קבוצות מחקר רבות לחקור כיצד תאים, רקמות ואורגאנוידים מגיבים לרמות כבידה ספציפיות, ובכך לסייע לנו לחזות סיכוני בריאות ולעצב אמצעי נגד למשימות חלל ארוכות טווח.
ציטוט: Kim, Y.J., Park, S. & Kim, S. Hardware-independent control for partial gravity simulation using a 2-DOF robotic device. Sci Rep 16, 9727 (2026). https://doi.org/10.1038/s41598-026-40665-6
מילות מפתח: דימוי כבידה חלקית, קלינוסטט, ביולוגיה בחלל, מחקר מיקרו‑כבידה, בקרת תנועה רובוטית