Clear Sky Science · he
אומדן כמותי של גרעין טשטוש ממודדי תנועה באמצעות תגובת תדירות מרחבית של קצה מוטה כמדד חדה
למה מצלמות מטושטשות ברכבים חשובות
רכבים מודרניים מסתמכים יותר ויותר על מצלמות לזיהוי הולכי רגל, קריאת שילוט תנועה ושמירה על נתיב הנסיעה. כמו הראייה האנושית, הראייה של מצלמה עלולה להיחלש בהדרגה עם הזמן בשל חום, רעידות או שינויים זעירים בהרכבה. מאמר זה חוקר שיטה חדשה ל"מדוד" עד כמה מצלמת רכב מטושטשת על ידי בחינת שלטי תנועה יומיומיים, דבר שיכול לאפשר ליצרני רכב לנטר את מצב המצלמה לאורך זמן במקום להמתין לכשלים.
הפיכת שלטי תנועה ללוחות בדיקה
במפעלים בודקים את חדי-המבט של מצלמות על דפוסי בדיקה מיוחדים לפני שיחרור היחידה. בכביש, לעומת זאת, אין מטרה מבוקרת כזו — רק העולם האמיתי. הכותבים מנצלים חפץ נפוץ וניתן לשחזור בעולם הזה: שלטי תנועה עם קצוות חדים ובעלי ניגוד גבוה. הם מתמקדים במדד חדה סטנדרטי שנקרא תגובת תדירות מרחבית (SFR), שמצביע בפועל עד כמה מצלמה שומרת על פרטים עדינים בתמונה. על ידי ניתוח של קצוות מעט מוטים ("מוטים") על שלטי תנועה, ניתן לחשב SFR בדומה לבדיקות מעבדה, אך ישירות מתוך תמונות נסיעה אמיתיות.

לתאר איך העדשה מפזרת אור
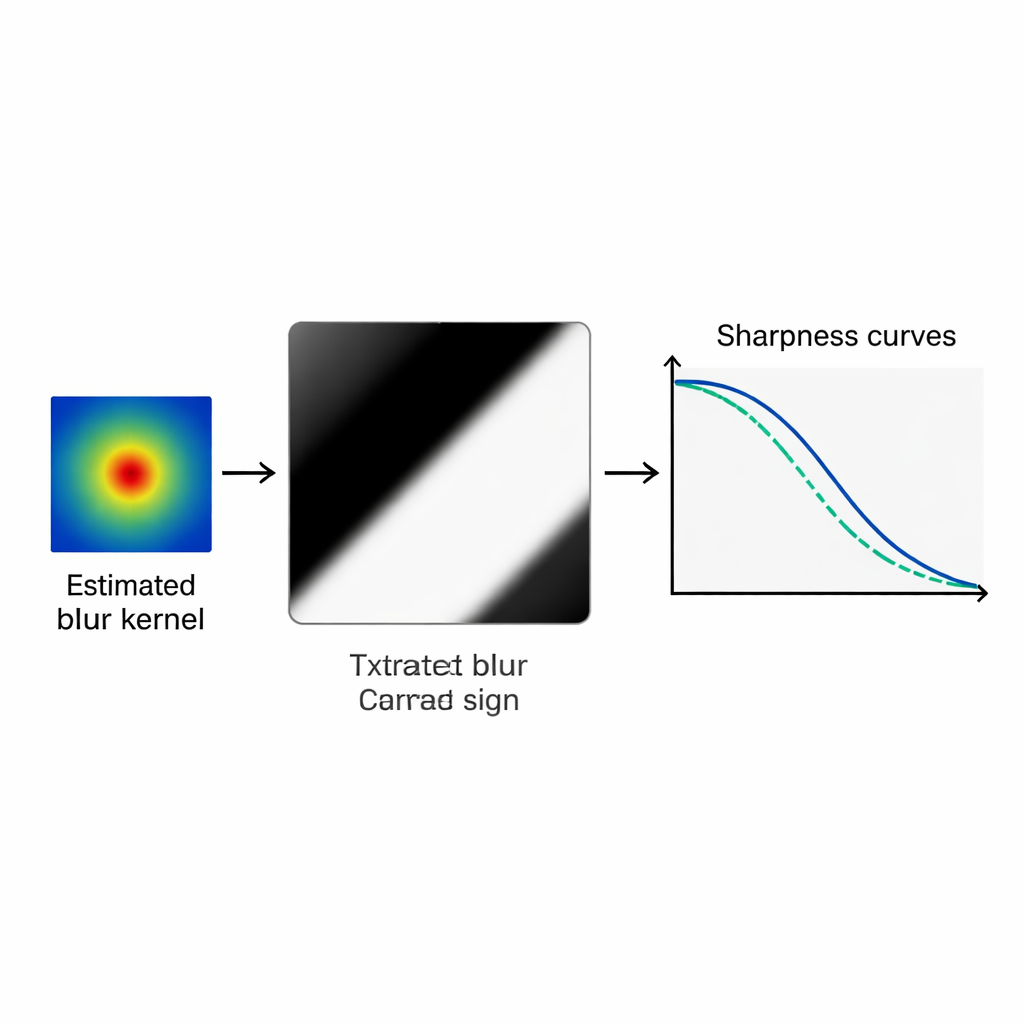
טשטוש במצלמה ניתן לתיאור באמצעות תמונה זעירה הנקראת גרעין טשטוש, או פונקציית התפשטות נקודה. היא מראה כיצד האור מנקודה בודדת בסצנה מתפזר על פיקסלים שכנים על החיישן. הערכה ישירה של גרעין זה מתמונה מטושטשת בדרך-כלל קשה מאוד, כי קומבינציות רבות של תמונה חדה ותבנית טשטוש יכולות להניב תוצאה דומה. כדי להתמודד עם זו, החוקרים משתמשים תחילה בתוכנת עיצוב אופטי כדי לדמות כ־1300 גרעיני טשטוש ריאליסטיים למצלמת רכב ספציפית, עבור מצבי מיקוד ומיקומים שונים בתמונה. אז הם מדחסים אוסף גדול זה לקבוצה קומפקטית של דפוסים מרכזיים באמצעות כלי סטטיסטי שנקרא ניתוח רכיבים עיקריים (PCA), כך שכל טשטוש ריאלי ניתן לתיאור על ידי כמה עשרות מספרים במקום מאות ערכי פיקסל.
להתאים עקומות חדות במקום פיקסלים
לאחר שבנוי "מילון" קומפקטי של טשטוש, תהליך האומדן מתחיל בשני חתכים קטנים, כל אחד בגודל 45 × 45 פיקסלים, שנחתכים מתמונת שלט תנועה מטושטשת, יחד עם חתכים תואמים מתמונה חדה של אותו שלט. עבור גרעין טשטוש מועמד הנלקח ממודל ה‑PCA, החתכים החדים מטושטשים באופן מלאכותי וחישובי עקומות ה‑SFR שלהם מתבצעים. עקומות אלו משווים לעקומות ה‑SFR שנמדדו מהחתכים המטושטשים האמיתיים. שיטת אופטימיזציה גלובלית הידועה כהתפתחות דיפרנציאלית מגיעה לפרמטרי הגרעין כדי למזער את ההבדל בין שתי קבוצות העקומות. למעשה, האלגוריתם מחפש את תבנית הטשטוש שגורמת לעקומות החדה הסינתטיות להתיישר ככל האפשר עם אלה הנמדדות מתמונת המצלמה האמיתית.
עד כמה השיטה עובדת?
הכותבים בודקים תחילה את שיטתם על נתונים סינתטיים, שבהם הם יודעים בדיוק את גרעיני הטשטוש האמיתיים. בעשר רמות טשטוש שונות, מחדה מאוד ועד אינו ממוקד באופן מורגש, הגרעינים המוערכים תואמים את האמת הקרקעית בצמוד על־פי כמה מדדי דמיון עצמאיים, עם ערכי דמיון מבניים (SSIM) טיפוסית מעל 0.95 ושגיאות ממוצעות נמוכות מאוד. הם משווים גם את גישתם לשיטות עדכניות של "הסרת טשטוש עיוורה" ממחשבי ראייה, שמטרתן העיקרית לשפר מראה תמונות ולא לשחזר בדיוק את צורת הטשטוש. במשימת שחזור מדויק של הגרעין הבסיסי למצלמה הספציפית הזו, השיטה החדשה המבוססת PCA עולה בבירור על קווי הבסיס האלה. לבסוף, הם מיישמים את האלגוריתם על תמונות אמיתיות ממצלמת רכב מותאמת שביכולת החיישן שלה להיסט להעביר במרחקים זעירים כדי לגרום לטשטוש ידוע. אף על פי שגרעיני הטשטוש האמיתיים אינם זמינים כאן, הגרעינים המוערכים מייצרים קצוות סינתטיים שעקומות החדה ומראהם החזותי נשארים קרובים מאוד לקצוות המטושטשים האמיתיים על פני טווח רחב של הגדרות מיקוד.
מטכניקת מעבדה לבדיקת בריאות המצלמה
לא־מומחים יכולים להסיק שהתוצאה המרכזית היא שהכותבים יכולים להפוך כעת שלטי תנועה רגילים לכלי דיאגנוסטיקה שמגלה כיצד האופטיקה של מצלמת רכב משתנה עם הזמן, ולא רק האם תמונה נראית חדה או מטושטשת. במקום מספר בדיקה חד־ערכי של מעבר/כישלון, גרעין הטשטוש המוערך מקודד מידע מפורט על אופן פיזור האור בתוך העדשה, שניתן לקשר בחזרה לאי־מיקוד או לסטיות אופייניות באופטיקה. בעוד שהשיטה הנוכחית כבדה חישובית ופועלת רק על חתכים קטנים סביב קצוות ברורים, היא מצביעה לכיוון מערכות עתידיות שבהן תמונות מזדמנות ישודרו מכלי רכב לשרת שמנטר דעיכה איטית בחדות המצלמה. הדבר יכול ליידע תחזוקה מונעת, לתמוך במערכות סיוע מתקדמות לנהג בצורה בטוחה יותר, ולבסוף לסייע לשמר את ה"עיניים" הדיגיטליות של כלי רכב אוטונומיים בריאותיות לאורך שנות שירות.
ציטוט: Pandey, A., Akhtar, M.Z., Veettil, N.K. et al. Quantitative Kernel estimation from traffic signs using slanted edge spatial frequency response as a sharpness metric. Sci Rep 16, 7387 (2026). https://doi.org/10.1038/s41598-026-40556-w
מילות מפתח: מצלמות רכב, חדות תמונה, גרעין טשטוש, דימות של שלטי תנועה, ניטור בריאות מצלמה