Clear Sky Science · he
מיפוי סמנטי המודע לאובייקטים באמצעות פונקציות צפיפות הסתברותית לאיתור מחדש ולתכנון מסלול פנימי
מדוע מפות פנימיות חכמות יותר חשובות
בזמן שרובוטים לבית ולשירות עוברים ממעבדות לדירות אמיתיות, הם צריכים לעשות יותר מסתם להימנע מקירות ורהיטים. כדי להיות מועיל באמת, הרובוט צריך להבין שמיטה בדרך כלל מצביעה על חדר שינה, או שמקרר מרמז על מטבח. מאמר זה מציג דרך חדשה שבה רובוטים "רואים" מרחבים פנימיים דרך האובייקטים המגדירים כל חדר, המאפשרת להם להבין היכן הם ולבחור מסלולים המתאימים יותר לאופן שבו אנשים משתמשים בבתיהם.
לראות חדרים דרך האובייקטים היומיומיים שלהם
מפות רובוטיות מסורתיות מתמקדות או בגיאומטריה גולמית או בסמלים מופשטים. מפות רשת שנבנות מסריקות לייזר מתעדות צורות בפירוט רב, אך נהיות כבדות לאחסון ואיטיות בחיפוש, ועלולות לדחוף את הרובוטים למסלולים נוקשים בדגם רשת. גרפים ברמה גבוהה של חדרים ודלתות קלים יותר לטיפול, אך הם מפספסים את הפרטים הקטנים הדרושים לנהיגה מדויקת. המחברים גשרים על הפער הזה על ידי ארגון המפות סביב חדרים והאובייקטים הסטטיים המרכזיים שבתוכם – מיטות, ספות, מקררים, שולחנות וכדומה. כל חדר מקבל מתווה בתוכנית הרצפה, ולכל סוג אובייקט חשוב יש שכבה משלו, כך שסוגי ריהוט שונים לא מוחקים זה את זה.
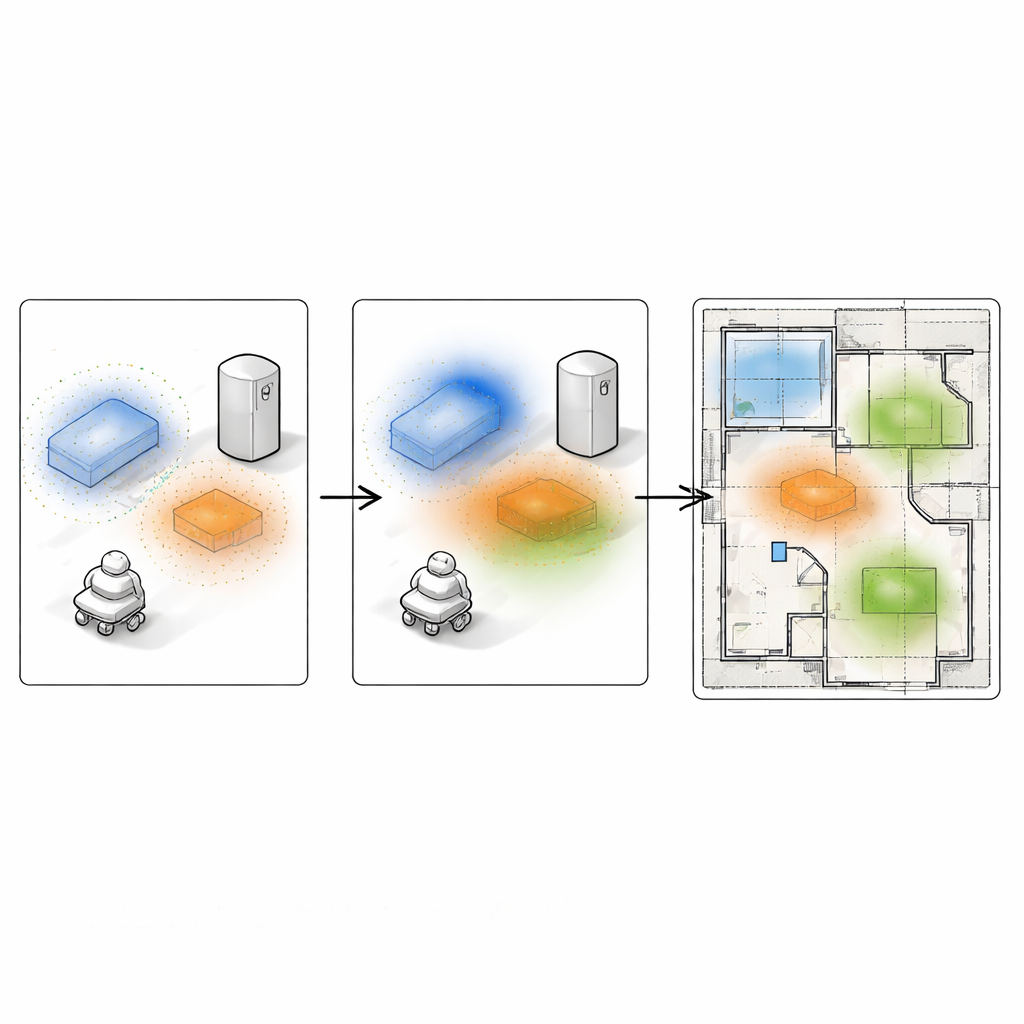
להפוך רהיטים לענני הסתברות רכים
במקום לצייר כל אובייקט כקופסה בעלת קצוות חדים, השיטה ממירה סריקות תלת‑ממד של רהיטים למפות חום חלקות על רצפה. הרובוט קודם כל משחזר כל חדר בתלת־ממד באמצעות מצלמת RGB‑D וכלים סטנדרטיים, ואז מתייג באופן סמנטי נקודות השייכות לאובייקטים כגון קירות, מיטות או כיסאות. עבור כל סוג אובייקט בתוך חדר, מתגלות קבוצות נקודות ומופעלות על הרצפה. מתוך קבוצות אלה המערכת מעריכה פונקציית צפיפות רציפה – כתם רך שהערך שלו גבוה שם שבה הסבירות שתמצא שם את האובייקט גדולה ומתפוגג בעדינות כלפי חוץ. הערמת הכתמים האלו לפי סוג האובייקט מייצרת מפה קומפקטית רב־שכבתית ששומרת הן על משמעות האובייקטים והן על צורתם המשוערת, תוך טיפול טבעי ברעש ובתצפיות חלקיות.
לתת לרובוטים לגלות מחדש היכן הם נמצאים
שימוש מרכזי אחד במפה הממוקדת אובייקטים הוא לעזור לרובוט לאתר את עצמו כשהוא לא יודע היכן הוא במפת הקומות – בעיה נפוצה כשהרובוט מתעורר או הועבר. הרובוט מצלם מחדש באמצעות מצלמת העומק שלו, מזהה אובייקטים בשדה הראייה ובונה סט קטן של כתמי הסתברות לסצנה החלקית הזו. לאחר מכן אלגוריתם חיפוש אבולוציוני חוקר עמדות רובוט אפשריות רבות על פני מפת המבנה. עבור כל תנאי מועמד, הכתמים המקומיים מונחים מעל המפה הגלובלית והדמיון ביניהם נמדד באמצעות מרחק סטטיסטי. גבולות חדרים ובדיקות קו ראייה מפסלים מצבים בלתי אפשריים, כמו לראות מקרר דרך קיר. במשך דורות רבים אוכלוסיית המועמדים מתפתחת לכיוון המיקום שבו האובייקטים הנצפים מתאימים ביותר לשדות ההסתברות המאוחסנים, מה שמניב הערכה חזקה למיקום ולכיוון של הרובוט.
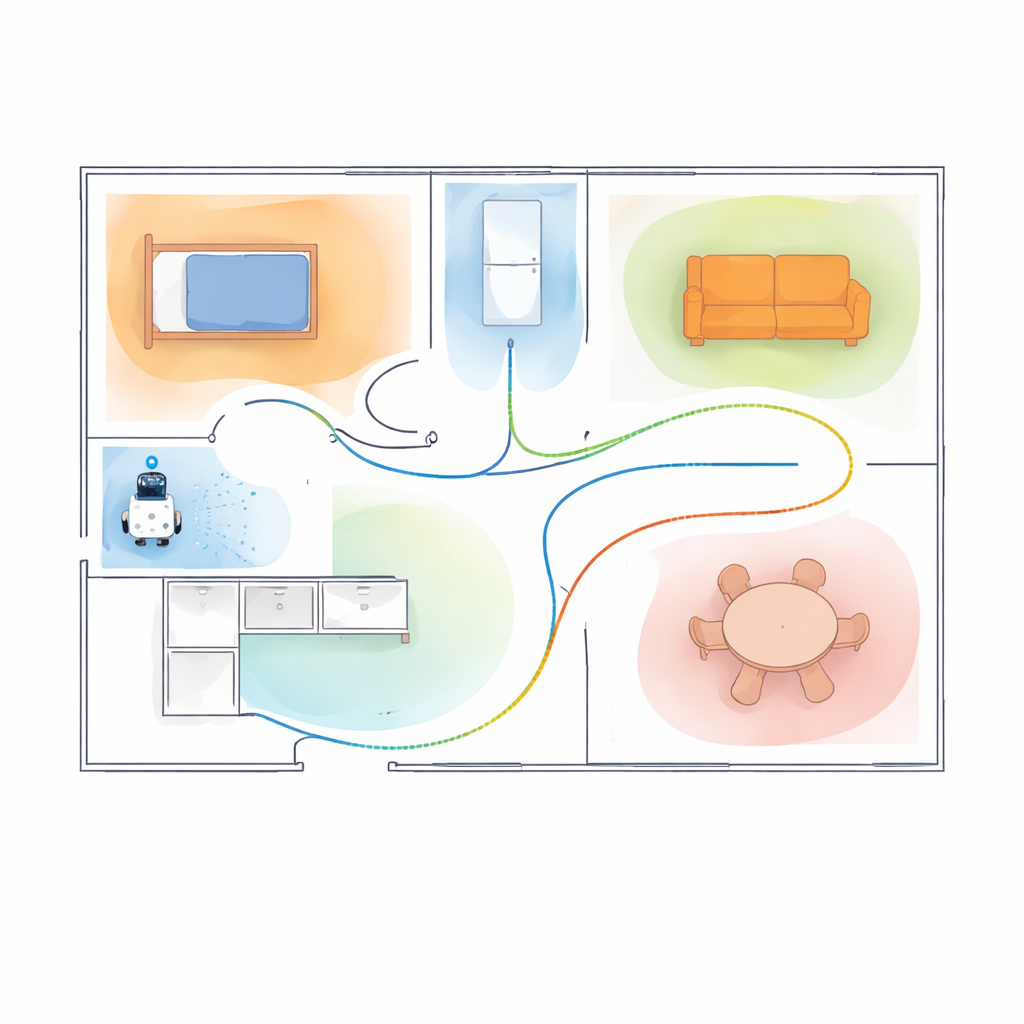
לתכנן מסלולים שמתחשבים באופן שבו אנשים משתמשים במרחב
אותה מפה גם מנחה את תנועת הרובוט. מכיוון שכל סוג אובייקט מיוצג כשדה השפעה חלק, ניתן להורות לרובוט להעדיף או להימנע מאזורים מסוימים על‑ידי התאמת משקלים מספריים. מיטות יכולות להפוך לאזורים להרחיק מהם בלילה, בעוד ששולחנות יכולים למשוך כאשר מחפשים פריטים. העדפות סמנטיות אלו משולבות עם מפה סטנדרטית של מכשולים ושול שול בטיחות מסביב לקירות כדי ליצור משטח עלות יחיד מעל תוכנית הרצפה. מתכנן מסלול קלאסי מוצא אז מסלולים שלא רק חפים מהתנגשות אלא גם עוקבים אחרי ההטיות החברתיות או המשימתיות הרצויות. ניסויים בערכת נתונים ריאליסטית ודירה מרוהטת אמיתית מראים שמסלולים המוטים סמנטית אלו עוקבים טוב יותר אחרי ההעדפות הרצויות, לפעמים על חשבון הגדלה קלה באורך המסלול, ויכולים להיות חלקים יותר בבתים אמיתיים.
מה זה אומר לרובוטים יומיומיים
במילים פשוטות, עבודה זו מלמדת רובוטים לראות בתים כפי שאנשים עושים: כחדרים המוגדרים על‑ידי הריהוט שלהם, לא רק כקופסאות ריקות עם קירות. על ידי עיטוף כל אובייקט מפתח בענן הסתברות רך, מפה קומפקטית אחת יכולה לתמוך הן ב"איפה אני?" והן ב"איך כדאי שאגיע לשם?" מבלי להזדקק למודלים נפרדים למשימות שונות. המבחנים מראים שגישה זו עוזרת לרובוטים להתמגן בצורה אמינה יותר בחדרים עמוסים או דומים זה לזה ולבחור מסלולים שתואמים יותר לציפיות אנושיות. ככל שרעיונות אלה יתפתחו, רובוטים ביתיים בעתיד עשויים לנווט בנימוס ובאינטליגנציה רבה יותר, נעו��ת במרחבינו עם מודעות שמרגישה פחות מכנית הרבה יותר.
ציטוט: Mora, A., Mendez, A., Moreno, L. et al. Object-aware semantic mapping using probability density functions for indoor relocalization and path planning. Sci Rep 16, 9450 (2026). https://doi.org/10.1038/s41598-026-40498-3
מילות מפתח: מיקום רובוטי פנימי, מיפוי סמנטי, ניווט המודע לאובייקטים, מפות רובוטיות הסתברותיות, תכנון מסלולים