Clear Sky Science · he
חציית שטח הסתברותית עמוקה עם התאמה בזמן ריצה לניווט מודע־אי־וודאות של רובר פלנטרי
מדוע נהיגה בטוחה יותר של רובר חשובה
כששולחים רובוטים גלגליים לירח או למאדים, הם חייבים לנסוע על חול, סלעים ומדרונות בלי עזרה אנושית. ניחוש שגוי אחד לגבי רכות הקרקע עלול להשאיר רובר בשווי מיליארדי דולרים תקוע לנצח, כפי שקרה לרובר Opportunity שנתקע בחול מחומצן לשבועות. המחקר הזה מציג שיטה חדשה שתאפשר לרוברים "להרגיש" עד כמה הקרקע שלפניהם מסוכנת, לבחור מסלולים בטוחים יותר, ואפילו ללמוד מטעויותיהם בזמן הנהיגה.
קרקע רכה כמסרב נסתר
בעולמות אחרים, המכשולים המסוכנים ביותר אינם תמיד סלעים או צוקים שניתן לראות בקלות במצלמות, אלא משטחים חלקים מטמונים של אדמה רופפת. כאשר גלגלי הרובר מסתובבים בסוג שטח כזה, הרכב מחליק, מתקדם הרבה יותר לאט ממה שנדרש, מבזבז אנרגיה ועלול להידרם לנעילה תמידית. מערכות ניווט מסורתיות מתמקדות בעיקר בסכנות גיאומטריות גלויות — מה נראה כמכשול ומה לא — בלי לתפוס במלואו כיצד הקרקע תתנהג תחת הגלגלים. באותו הזמן, שיטות למידת מכונה שמנסות לחזות החלקת גלגלים מתמונות וממפות תלת־ממדיות עלולות לטעות בתנאים לא מוכרים, כמו תאורה שונה או מדרונות תלולים יותר, ובדרך כלל אינן מדווחות עד כמה הן בלתי־ודאיות בתחזיותיהן.
ללמד רובר לשקול סיכון
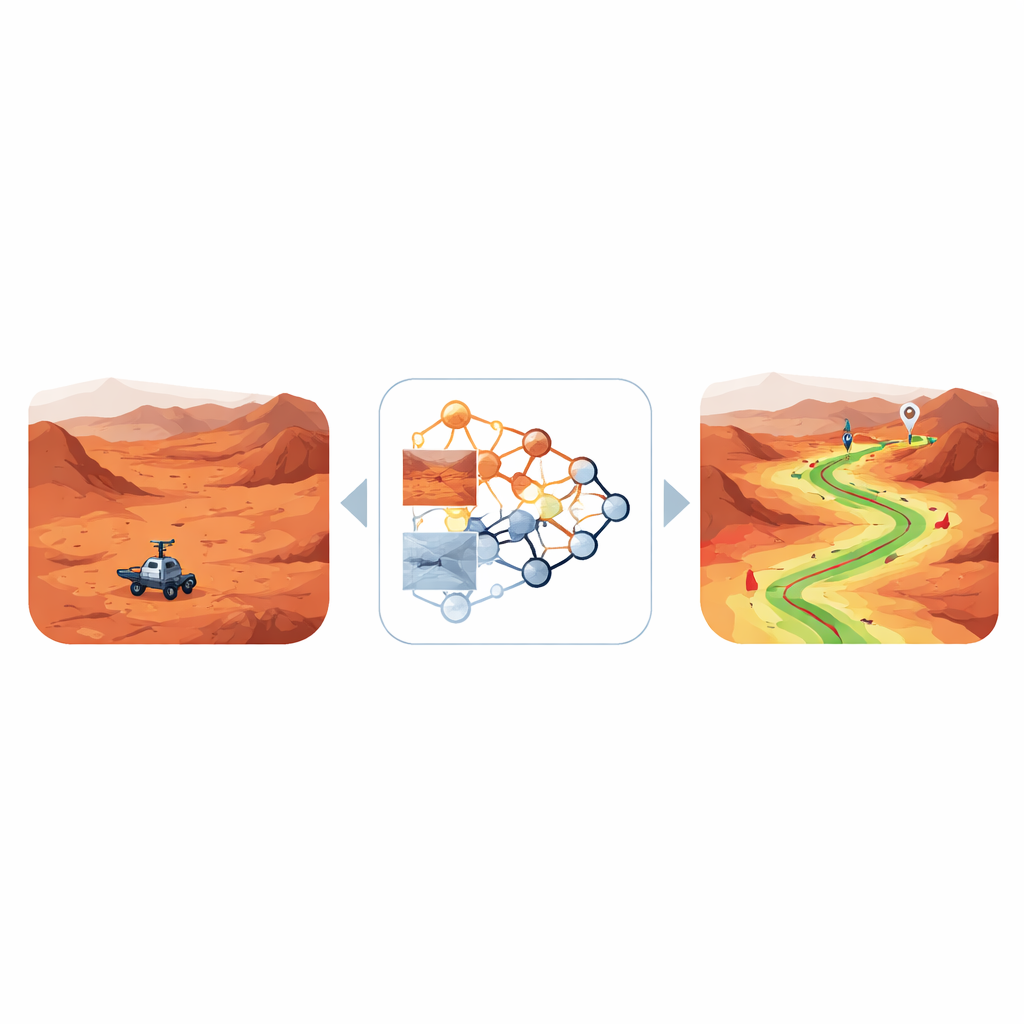
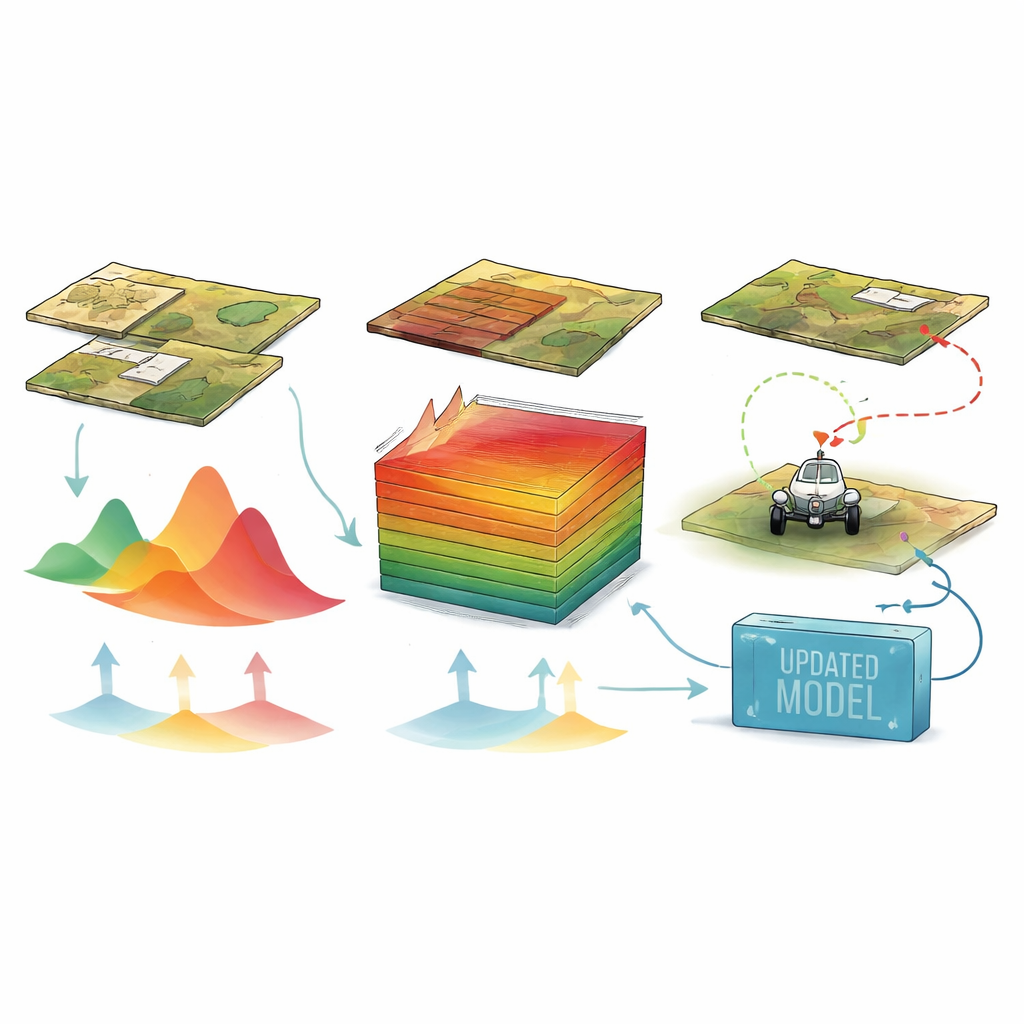
המחברים מציעים מסגרת משולבת של למידה ותכנון שהם קוראים לה חציית שטח הסתברותית עמוקה. במקום להפיק ניחוש יחיד "הטוב ביותר" לגבי מידת ההחלקה של הגלגלים בכל חלק משטח, המודל שלהם מנבא התפלגות הסתברותית מלאה של החלקות אפשריות, על סמך תמונות צבע ושיפוע מקומי. אנסמבל של רשתות עצביות עמוקות מביט בנוף מלמעלה ובעבור כל מהלך אפשרי ברשת מפיק הן ערך צפוי להחלקה והן את חוסר הוודאות שלו. מתוך התפלגות זו המערכת מתרגמת החלקה למהירות נהיגה אפקטיבית ולבסוף לעלות זמן נסיעה לכל צעד. אזורים שבהם סביר שהרובר ייתקע מקבלים עלויות גבוהות מאוד; אזורים שבהם התחזית גם טובה וגם בטוחה מקבלים עלויות נמוכות. אלגוריתם חיפוש מסלול סטנדרטי מוצא אז מסלול שמאזן בין מרחק קצר לסיכון נמוך של ניתוק.
לאפשר לרובר ללמוד תוך כדי תנועה
אתגר מרכזי בחקירה פלנטרית הוא שהתנאים שרובר נתקל בהם בהגעה עשויים להיות שונים במידה ניכרת מנתוני האימון: המדרונות עשויים להיות תלולים יותר, תכונות הקרקע לא מוכרות או התאורה שונה מאוד. כדי להתמודד עם זאת, המסגרת כוללת מנגנון התאמה בזמן ריצה. ככל שהרובר נוסע, הוא מודד את ההחלקה הממשית שהוא חווה. אחרי כל תנועה קצרה, מדידות טריות אלו משמשות לכוונון עדין של שכבות "קנה מידה והזזה" (scale and shift) ברשתות העצביות תוך שמירה על המשקלים המקוריים קבועים. אסטרטגיה זו מאפשרת למודל להסתגל במהירות לקרקעות חדשות באמצעות מספר מצומצם של תצפיות, תוך שמירה על מה שלמד בתנאים שראתה קודם. תחזיות מעודכנות מוזנות חזרה לתכנון מחדש, כך שהמסלול הנבחר יכול להשתפר בזמן אמת.
להעמיד את המערכת למבחנים קשים
מכיוון שמידע של רוברים אמיתיים מכסה רק סוגים מוגבלים של שטחים, הצוות בנה מאגר נתונים סינתטי גדול של נופים בסגנון מאדים. הם שילבו טופוגרפיה מחוספסת שנוצרה במחשב עם עשר כיתות שטח סמויות, שלכל אחת צבע והתנהגות החלקה משלה, ושינו גם את תלילות המדרונות וגם את כיוון התאורה כדי ליצור תרחישים מוכרים ולא מוכרים. באלפי משימות מדומות, שיטה זו הושוותה לשני מתכננים מתקדמים אחרים שהתעלמו מאי־ודאות או השתמשו בה באופן פחות ישיר. בתנאים מוכרים כל הגישות הופיעו בדומה. אך במקרים המאתגרים ביותר — תאורה עמומה ומשטח דמוי קרטר תלול — הגישה ההסתברותית העמוקה לחציית שטח השיגה שיעורי הצלחה גבוהים יותר והחלקת מקסימום נמוכה יותר, תוך שמירה על זמני נסיעה תחרותיים. כשהתאפשרה התאמה תוך כדי תנועה, המערכת צמצמה עוד יותר את שגיאות התחזית ושיפרה את הבטיחות, במיוחד בסביבות שהשתנו באופן ניכר מהאימון.
מה זה אומר למשימות העתידיות
לקורא כללי, המסר המרכזי הוא שעבודה זו מעניקה לרוברים פלנטריים דרך זהירה ומודעת־עצמית יותר לנהוג על קרקע מסוכנת. במקום להאמין בעיוורון בתחזית יחידה לגבי אחיזת גלגליהם, רוברים יכולים כיום לשקול הן את ההתנהגות הצפויה והן את אי־הוודאות, ולבחור מסלולים מהירים אך סביר שלא ישאירו אותם תקועים. על ידי למידה מתמשכת מניסיון ההחלקה שלהם עצמם, הם יכולים להסתגל לחול, מדרונות ותאורה חדשים ללא הצלה אנושית. כשסוכנויות החלל מתכננות משימות קרקע ארוכות ושאפתניות יותר, ניווט מודע־אי־וודאות כזה עשוי לעזור להבטיח שרובוטים יקדישו יותר זמן לחקירת יעדי מדע חדשים ופחות זמן בחילוץ עצמם ממצוקה.
ציטוט: Endo, M., Taniai, T. & Ishigami, G. Deep probabilistic traversability with test-time adaptation for uncertainty-aware planetary rover navigation. Sci Rep 16, 9499 (2026). https://doi.org/10.1038/s41598-026-40109-1
מילות מפתח: ניווט רובר פלנטרי, חציית שטח, תכנון מודע אי־וודאות, למידת מכונה ורובוטיקה, חקירה אוטונומית