Clear Sky Science · he
הכרה חסינה של מקומות תחת שינויים בתאורה באמצעות פזו-ליידאר מתמונות אובימדיקשנליות
רובוטים שמעולם לא הולכים לאיבוד בחושך
דמיינו רובוט שיכול לזהות היכן הוא נמצא בתוך מבנה, בין אם זה בצהריים כשהשמש חודרת דרך החלונות או מאוחר בלילה כשמאירים רק כמה מנורות. המאמר הזה מציג שיטה חדשה להעניק לרובוט תחושת מקום אמינה כזו באמצעות מצלמה יחידה וזולה יחסית. על ידי המרת תמונות שטוחות למידע תלת-ממדי, החוקרים מפחיתים את התלות של הניווט בצללים, סינוורים ושינויים בתאורה שמבלבלים מערכות מבוססות ראייה.
מדוע לזהות את אותו מקום פעמיים קשה
עבור רובוט, "הכרה של מקום" היא היכולת להבין, "כבר הייתי כאן", כדי למקם את עצמו על מפה ולהתנהל בבטחה. מערכות מסורתיות מסתמכות על מצלמות רגילות או על חיישני טווח מבוססי לייזר הידועים כ־LiDAR. מצלמות זולות ותופסות מידע עשיר של צבע ומרקם, אבל המראה שלהן משתנה קיצונית בין יום מעונן, שמש מלאה ולילה. LiDAR יציב יותר כי הוא מודד מרחק ישירות, אך הוא כבד ויקר. חלק מהרובוטים משלבים מספר חיישנים, אך זה מייקר ומסבך את המערכת. מחברי העבודה הזו בחרו גישה אחרת: הם שומרים על חומרה פשוטה — מצלמה אובימדיקשנלית אחת שמקיפה את הרובוט — ומשדרגים את התוכנה כדי שהרובוט יחשוב במונחים של מבנה תלת-ממדי במקום הופעה גולמית.
מתמונות מקיפות לצורות תלת-ממדיות
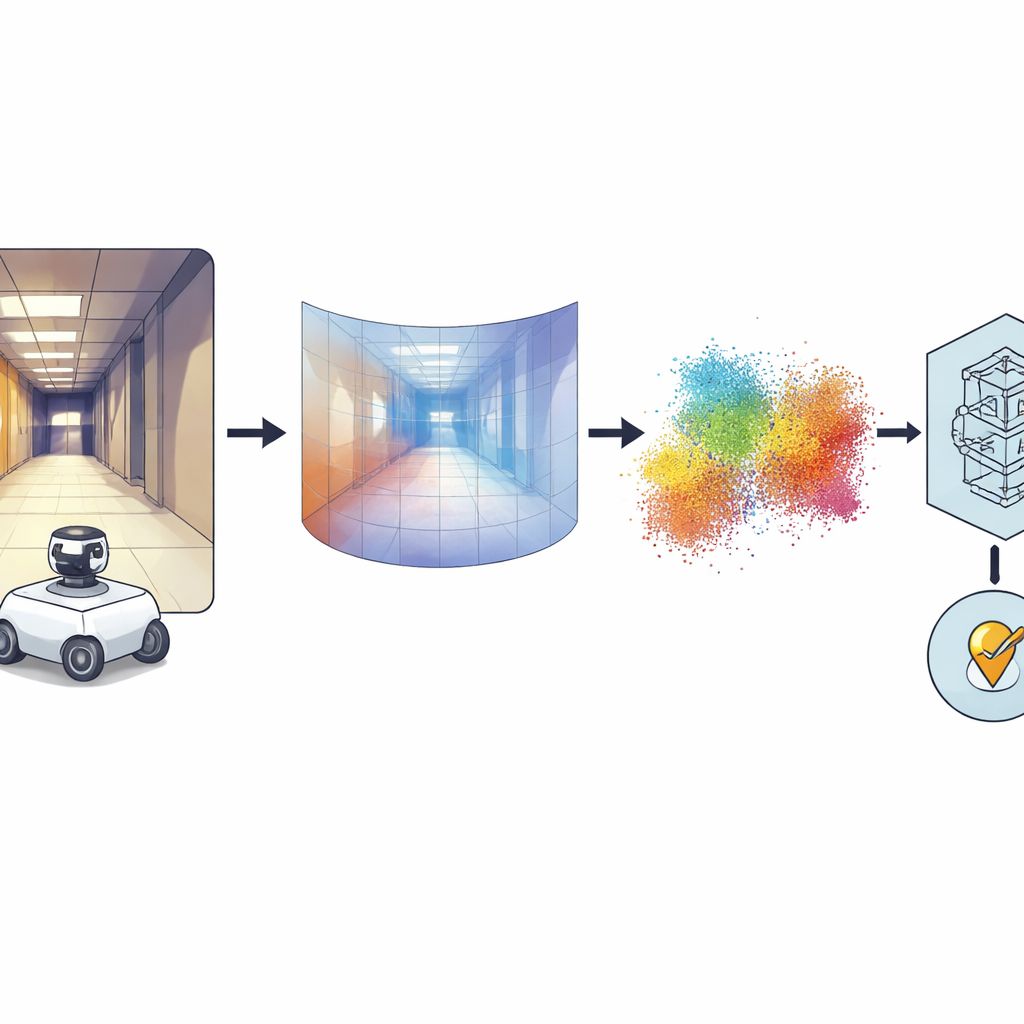
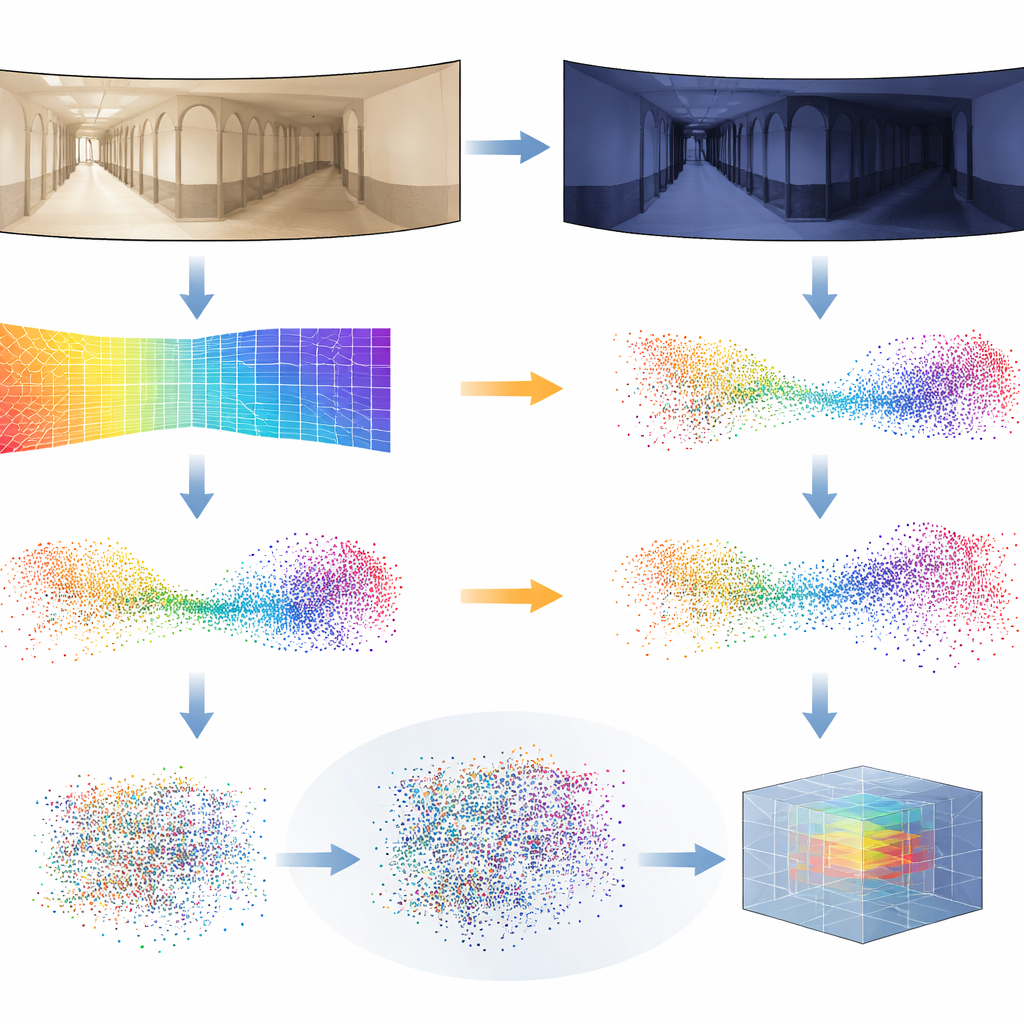
הרעיון המרכזי הוא להמיר כל תמונה פנורמית למפת עומק צפופה, שבה כל פיקסל מקודד כמה רחוק החלק מהסצנה מהמצלמה. לצורך כך המחברים מסתמכים על «מודל יסוד» חזק בשם Distill Any Depth, שלמד להסיק עומק מאוספי תמונות עצומים. מפת העומק המתקבלת מומרת לענן נקודות תלת-ממדי — מעין ליידאר וירטואלי או פזו-ליידאר — מבלי להזדקק לסורק לייזר אמיתי. עיבוד נוסף מנקה ארטיפקטים שהוכנסו על ידי המראה המיוחדת של המצלמה ה־360°, כך שאזורים חסרים או מכוסים מולאים. לבסוף, רשת נוירונים בשם MinkUNeXt, המתוכננת לעבוד ישירות על ענני נקודות תלת-ממדיים, דוחסת כל ענן לטביעת אצבע קומפקטית שתופסת את הפריסת המרחב הכוללת של המקום.
להכשיר את המערכת להתעלם מהטריקים של התאורה
אמדני עומק אינם מושלמים, במיוחד כשהתאורה משתנה בצורה דרמטית מהרגע לרגע. כדי להפוך את המערכת לחסינה, החוקרים מציעים טריק אימון חדש שהם קוראים לו Distilled Depth Variations. במקום להסתמך על מודל עומק יחיד, הם משלבים בכוונה תחזית עומק ממספר גרסאות קטנות ופחות מדויקות של המעריך. "רעש" מבוקר זה מדמה את סוגי העיוותים שמופיעים בתנאי תאורה שונים, וכופה על הרשת התלת-ממדית ללמוד מה באמת חשוב בגאומטריה של המקום ומה ניתן להתעלם ממנו בבטחה. הם גם מעשירים כל נקודה תלת-ממדית במידע על קצוות התמונה ועוצמת המרקם — תכונות שנוטות להיות יציבות יותר בפני שינויים בתאורה מאשר צבע גולמי.
הוכחה שזה עובד במציאות
כדי לבחון את הגישה שלהם, הצוות השתמש במאגרי מידע ציבוריים תובעניים של מסלולי רובוט בתוך מבנים. בקולקציות אלו הרובוט משוטט במסדרונות ובחדרים כמה פעמים בתנאי יום מעונן, שמש בהירה ולילה, בזמן שרהיטים ואנשים זזים. המחברים אימנו את המערכת שלהם רק על תמונות מעוננות מבניין אחד ואז בדקו אותה על כל הבניינים ותנאי התאורה, כולל סצנות שמעולם לא נראו בעבר. שיטת הפזו-ליידאר שלהם התאימה בעקביות או עלתה על שיטות מובילות מבוססות תמונה דו-ממדית ומערכות תלת-ממד אחרות, במיוחד במקרים הקשים ביותר כמו ריצות לילה או העברות לסביבות חדשות לחלוטין. הם גם הראו שהצינור הזה עובד עם מצלמות קדמיות רגילות, לא רק פנורמיות, על ידי החלפת ההיטל המתאים מעומק לתלת-ממד.
מה המשמעות של זה לרובוטים בעתיד
במילים פשוטות, עבודה זו מראה שרובוט יכול להשיג מודעות בסגנון LiDAR לסביבתו באמצעות מצלמה יחידה ותוכנה חכמה. על ידי התמקדות במבנה תלת-ממדי ולא בפרטים הפכפכים של תאורה וצבע, המערכת יכולה לזהות מקומות באופן אמין בין יום, לילה ושינויים במזג האוויר, תוך שמירה על חומרה פשוטה וזולה. זה עלול להפוך ניווט פנימי חסין לנגיש יותר עבור רובוטי שירות, רכבי מחסנים ומכשירי סיוע, ופותח פתח למערכות עתידיות שישלבו עומק עם הבנה סצנית ברמה גבוהה יותר לאוטונומיה אמינה עוד יותר.
ציטוט: Cabrera, J.J., Alfaro, M., Gil, A. et al. Robust place recognition under illumination changes using pseudo-LiDAR from omnidirectional images. Sci Rep 16, 8817 (2026). https://doi.org/10.1038/s41598-026-39848-y
מילות מפתח: מיקום רובוט, ראייה תלת-ממדית, הכרה של מקום, אמידת עומק, מצלמות אובימדיקשנל