Clear Sky Science · he
ACFM: אלגוריתם מיזוג מותאם משוקלל ערוצי לשיפור ביצועי זיהוי אובייקטים קטנים בתעבורת רחפנים
לראות יותר מהשמיים
כשרחפנים עוקבים יותר ויותר אחרי תנועה, בטיחות קהל ואזורי אסון, הם מתמודדים עם בעיה פשוטה אך עקשנית: מלמעלה, הדברים שמעניינים אותנו—מכוניות, אוטובוסים ואפילו אנשים—תופסים לעתים רק כמה פיקסלים. נקודות זעירות אלה קל לאלגוריתמים לפספס, במיוחד ברחובות עירוניים עמוסים בצללים, שלטים וטשטוש תנועה. מאמר זה מציע שיטה חדשה שעוזרת למחשבים "לראות" אובייקטים קטנים כאלה בצורה חדה יותר בצילומי רחפן, מבלי להאט את הגילוי באופן משמעותי.
למה נקודות זעירות חשובות
מצלמות רחפן לוכדות סצנות רחבות מגבהים גבוהים, כך שתמונה אחת יכולה להכיל כבישים מהירים, מבנים, עצים ועשרות כלי רכב. רוב כלי הרכב הללו מופיעים קטנים מאוד ועלולים להסתיר זה את זה או חפפים זה את זה. גלאי־למידה עמוקה מסורתיים מצטיינים בזיהוי אובייקטים גדולים וברורים, אך הם נוטים לאבד פרטים דקים כאשר המידע עובר דרך שכבות עמוקות יותר ברשת. התוצאה היא שכלי רכב קטנים נבלעים ברקע, במיוחד בצומת צפופות, בתאורה חלשה או בצילומים מעט מטושטשים. שיטות רב־קנ"מ קיימות עוזרות במידה מסוימת על ידי שילוב מידע משכבות שונות של הרשת, אך בדרך כלל הן מסתמכות על כללים קבועים מראש וקשות להסתגל כשהסצנה הופכת מסורבלת או מורכבת במיוחד.
דרך חכמה יותר למזג רמזים
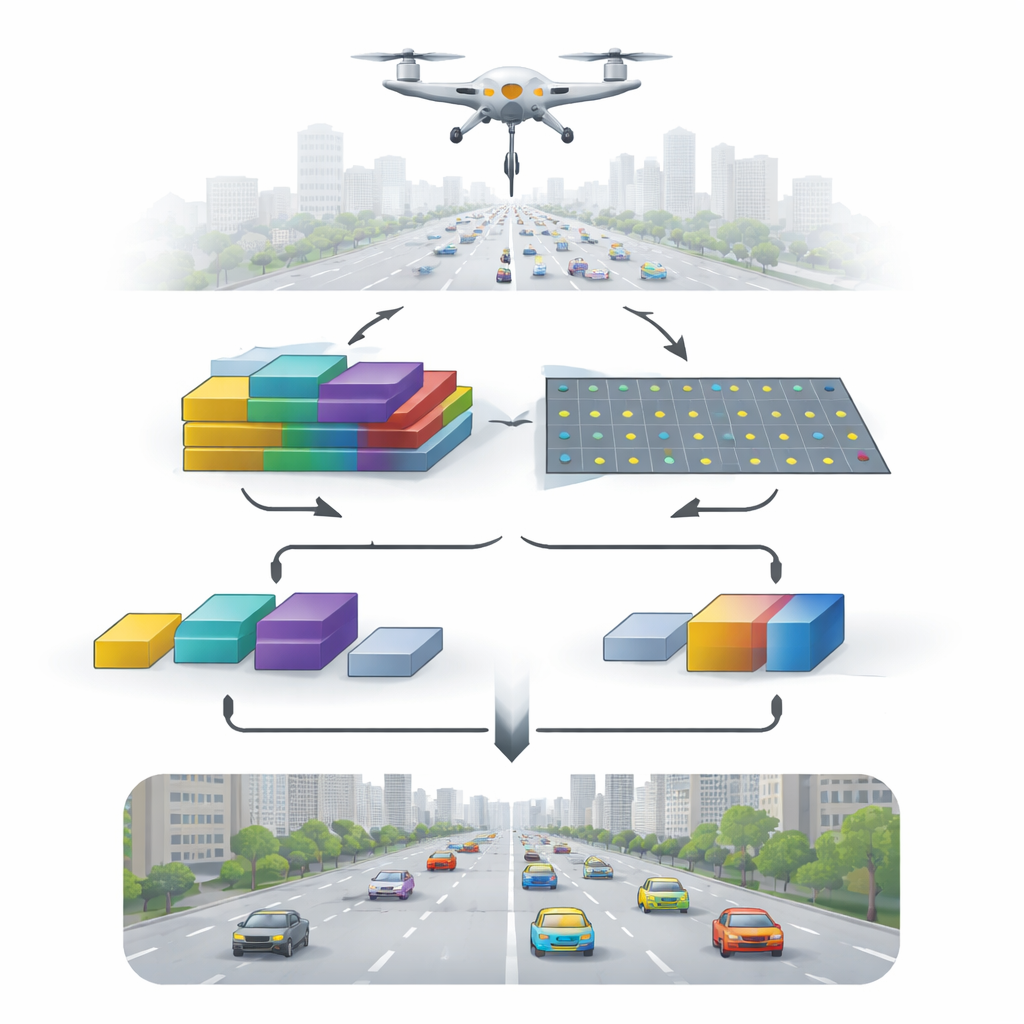
המחברים מציעים מודול מיזוג משוקלל ערוצי מותאם, או ACFM, שנועד להתחבר לגלאים קיימים ולהפוך אותם טובים יותר בזיהוי מטרות קטנות בסצנות תעבורה מרחפנים. במקום להתייחס לכל המידע הוויזואלי כשווה, ACFM מריץ שני סניפים מיוחדים במקביל ולאחר מכן ממזג את הפלטים שלהם בצורה התלויה בסצנה. סניף אחד משפר את אופן הטיפול במאפיינים על פני קנ"מ כדי שפרטים מרחביים עדינים לא ייטשטשו. הסניף השני פועל כמו אביזר אור, ומגביר רמזים חשובים של אובייקטים קטנים תוך הדחקת דפוסי רקע מסיטים. באופן מהותי, המיזוג בין הסניפים הללו אינו קבוע. ACFM מתאים כמה הוא סומך על כל סניף בהתאם לתמונה הנוכחית, ומאפשר למערכת להגיב אחרת לכביש שקט מאשר לצומת צפופה.
שמירה על פרטים על פני קנ"מ
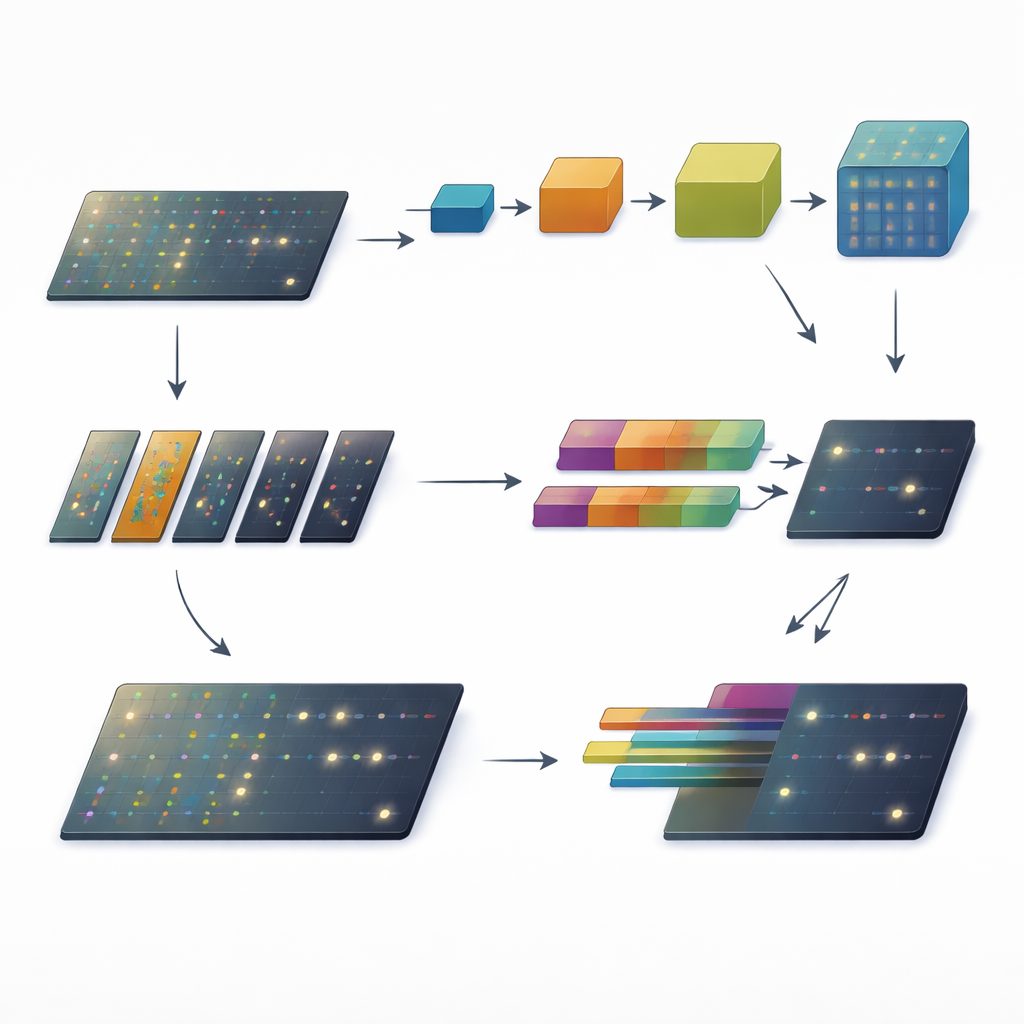
בסניף הראשון, המכונה יחידת השיפור רב־הקנ"מ, הרשת מעבירה מאפיינים דרך זוג מסלולים. מסלול אחד שומר פשוט על המידע המקורי, ומבטיח שפרטים חדים ברזולוציה גבוהה ישרדו. המסלול השני מדחס ואז מרחיב את ייצוג התמונה, ועוזר למודל להבין את ההקשר הרחב יותר של מיקום כלי הרכב הקטנים בתוך הסצנה. בסוף, מסלולים אלו מתמזגים כך שכל פיקסל ביציאה נהנה הן מפרט מקומי חד והן מהבנת הסביבה. הדבר מקל על הגלאי לצייר קופסאות חופפות צרות ועקביות סביב מכוניות ואוטובוסים קטנים בגדלים שונים, גם כאשר הרקע עמוס או חלקית מוסתר.
הנמכת רעש הרקע
הסניף השני מתמקד בקשב. הוא מפצל את ערוצי המאפיין לקבוצות ולומד, עבור כל קבוצה, "מסיכה" דלילה המבליטה רק את האזורים המבטיחים ביותר. אזורים שנראים כרקע—משטחי כביש, גגות בניינים, צמרות עצים—מודלקים כלפי מטה, בעוד אותות זעירים אך משמעותיים, כגון השתקפויות וקצוות של כלי רכב, מוכללים. על ידי שילוב פרטים מחודדים אלה חזרה עם המאפיינים המקוריים באופן מבוקר, סניף הקשב הדליל המקובץ מייצר מבט נקי ומבדיל יותר על הסצנה. כך קטן הסיכוי שהגלאי יבלבל דפוסים על האספלט או צללים של בניינים עם כלי רכב אמיתיים.
לתת לסצנה לבחור את התערובת
החלק הסופי של ACFM הוא מנגנון משקלות מותאם ברמת הערוץ שמחליט, ערוץ-על-ערוץ, כמה להסתמך על כל סניף. הוא מסכם תחילה מה קורה בכל התמונה, ואז משתמש בפעולה קלת משקל כדי להסיק סט משקולות בין אפס לאחד. אם הסצנה פשוטה והאובייקטים מופרדים היטב, הרשת עשויה להישען יותר על השיפור רב־הקנ"מ. אם הסצנה צפופה, מסורבלת או רועשת, היא יכולה להזיז יותר דגש לסניף הקשב שמדכא הסחות רקע. האיזון הדינמי הזה מחליף כללים קשיחים מעשה יד אדם באסטרטגיה אוטומטית ומונחית־נתונים, ומאפשר לגלאי להגיב באופן גמיש כשהתנאים משתנים מפריים לפריים.
עיניים חדות יותר לתעבורת רחפנים
כאשר הוטמעה בתוך גלאי פופולרי בשם GFL ונבחנה על שלוש מערכות נתונים ציבוריות של תעבורת רחפנים, ACFM שיפרה בעקביות ציוני זיהוי, במיוחד במערכות מאתגרות עם כלי רכב רבים וקטנים החופפים זה את זה. השיפורים בדיוק הגיעו בעלות חישובית נוספת מזערית, כלומר המערכת המורחבת עדיין יכולה לפעול קרוב לזמן אמת—דרישה קריטית לניטור תנועה מעשי. עבור קהל שאינו מומחה, המסקנה ברורה: על ידי שמירה על פרטים, דיכוי רעש והתאמה של אופן שילוב המאפיינים לפי הסצנה, ACFM עוזר לרחפנים לפעול יותר כמו צופים אנושיים קשובים ופחות כמו מתאמי תבניות קשיחים, ומהווה בסיס אמין יותר ליישומי עיר חכמה וניטור אווירי בעתיד.
ציטוט: Liu, S., Zhu, H., Yuan, Z. et al. ACFM: adaptive channel weighted fusion algorithm for improving small object detection performance in UAV traffic. Sci Rep 16, 8366 (2026). https://doi.org/10.1038/s41598-026-39789-6
מילות מפתח: ניטור תנועה באמצעות רחפנים, זיהוי אובייקטים קטנים, ראייה ממוחשבת, מנגנוני קשב, מיזוג מאפיינים רב-קנ"מ