Clear Sky Science · he
CGDFNet: רשת סמנטית בזמן אמת בעלת סניפים כפולים ומיזוג פרטים מונחה‑קונטקסט
ללמד מכוניות לראות את הרחוב במלואו
מכוניות ורובוטים מודרניים מסתמכים יותר ויותר על מצלמות כדי להבין את העולם שסביבם — לזהות בזמן אמת כבישים, מדרכות, אנשים, רכבים ושלטים. מאמר זה מציג את CGDFNet, מערכת ראייה ממוחשבת חדשה המיועדת לבצע סוג זה של "הבנת סצינה" במהירות ובדייקנות גבוהה יותר, במיוחד ברחובות עירוניים צפופים. על‑ידי למידה לשמור בו‑זמנית גם על פרטים עדינים (כמו עמודי רמזורים או גלגלי אופניים) וגם על המבנה הכולל (כמו כבישים ובניינים), CGDFNet שואפת להפוך נהיגה אוטומטית ומשימות ראייה בזמן אמת לבטוחות ומהימנות יותר.
מדוע ראייה ברמת פיקסל דורשת כל כך הרבה
בסגמנטציה סמנטית, המחשב מקצה קטגוריה לכל פיקסל בתמונה: כביש, רכב, הולך רגל, שמים וכו'. זה תובעני הרבה יותר מאשר ציור תיבה סביב רכב, כי המערכת חייבת לעקוב אחרי גבולות עצמים וצורות קטנות בדיוק גבוה. קיימות שיטות רבות בעלות דיוק גבוה, אך רבות מהן איטיות וצורכות חשמל רב — דבר שאינו מתאים למערכות בזמן אמת במכוניות, רחפנים או מכשירים לובשים. מצד שני, שיטות קלות ומהירות לעיתים מקריבות פרטים או מאבדות את התמונה הכוללת, מתקשות לזהות עצמים קטנים, מבנים דקים או סביבות עירוניות צפופות.
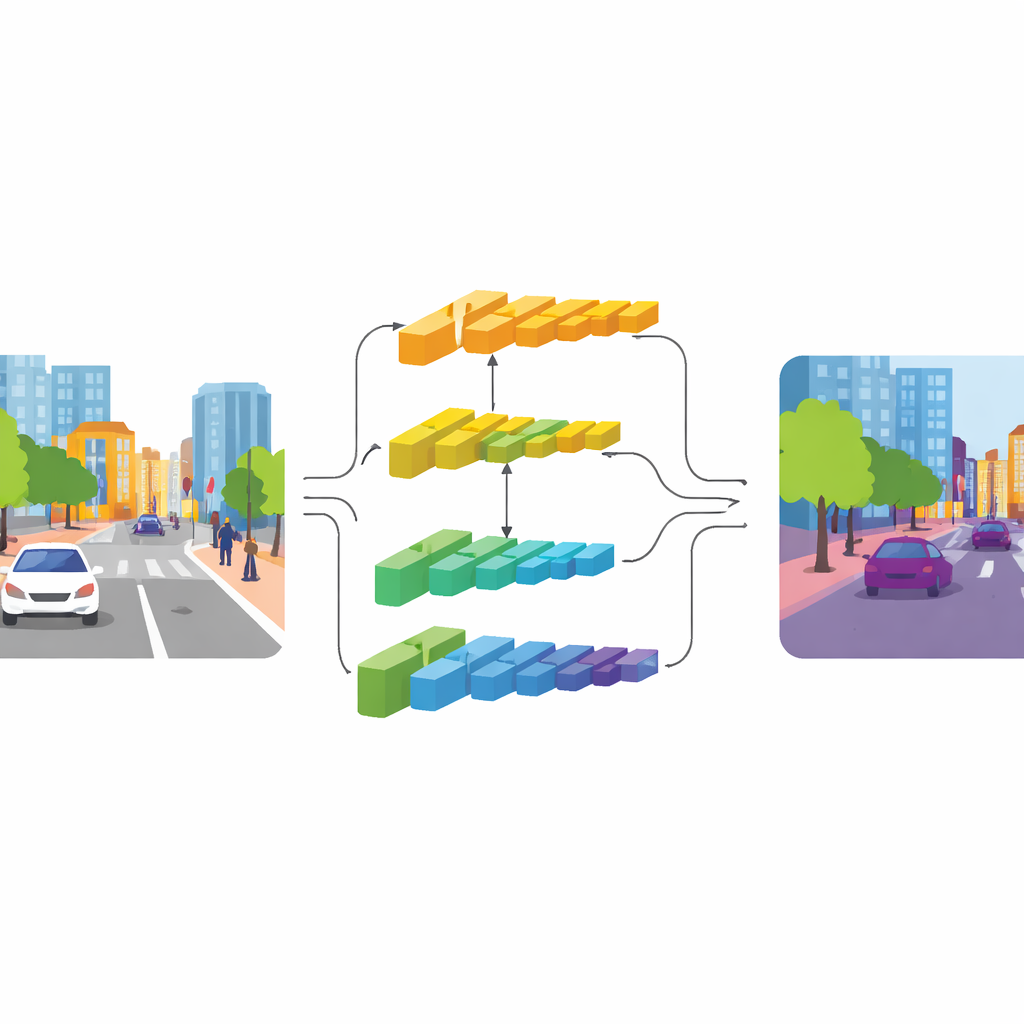
שני מסלולים: אחד לפרטים ואחד להקשר
CGDFNet מתמודדת עם המתחים האלה בעיצוב בעל שני סניפים: סניף אחד מתמקד בפרטים חדים, והשני לוכד הקשר רחב. מבוסס על גרעין יעיל, שכבות נמוכות מוזנות ל"סניף הפרטים" ששומר על רזולוציה גבוהה לשימור קצוות ומרקמים. שכבות עמוקות יותר מוזנות ל"סניף ההקשר" שמתבונן בסצינה בצורה דחוסה יותר, מתאים להבנת מבנה כללי ויחסים בין עצמים. בשונה מעיצובים מוקדמים של שני סניפים ששמרו על זרמים נפרדים ואז פשוט שילבו אותם באופן גס, CGDFNet מעודדת תקשורת ביניהם במהלך כל העיבוד, כך שפרטים עדינים נבחנו כל הזמן ביחס למה שהרשת יודעת על הסצינה כולה.
להנחות פרטים בעזרת משמעות
שני רכיבים מרכזיים מחזקים את האינטראקציה הזו. בסניף ההקשר, מודול שימור סמנטי (Semantic Refinement Module) לומד להדגיש אזורים וערוצים המידעיים ביותר במפות התכונה שלו. הוא עושה זאת על‑ידי שילוב רמזים מקומיים (אילו חלקים של הסצינה פעילים קרוב זה לזה) עם רמזים גלובליים (מה שהרשת רואה בכל התמונה), כך שהייצוג נושא הן פרטי שכונה והן משמעות ברמת הסצינה. בסניף הפרטים, מודול פרטים מונחה־הקשר (Context‑Guided Detail Module) משתמש במידע הסמנטי הזה כדי לכוון תשומת לב לקצוות ולמבנים עדינים שחשובים, כגון קווי המתאר של אוטובוס או שלדת אופניים. הוא נשען על סוג מיוחד של קונבולוציה הרגיש יותר לשינויים בין פיקסלים סמוכים, שמדגישה באופן טבעי קונטורים וחפצים קטנים מבלי להוסיף פרמטרים רבים.
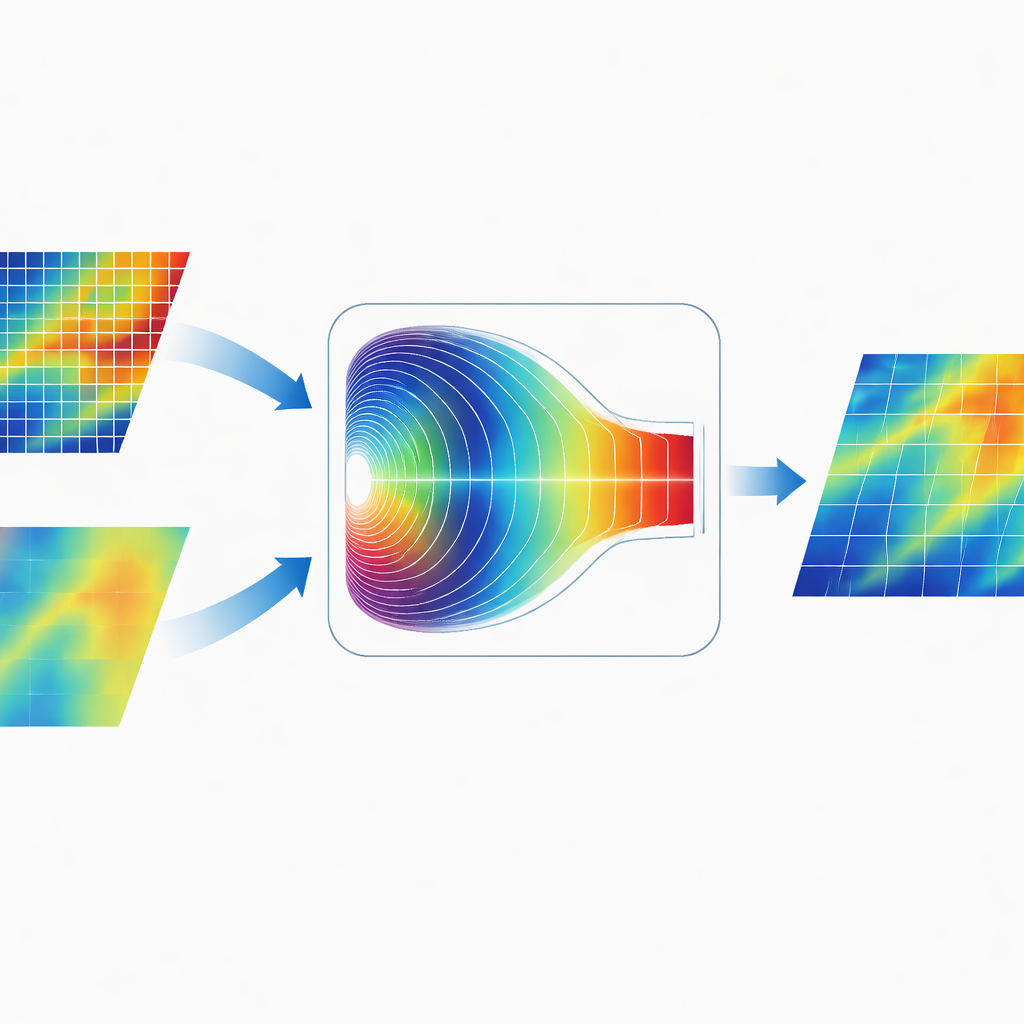
מיזוג מידע בעולם התדירויות
מאפיין מובחן של CGDFNet הוא האופן שבו היא משלבת את שני הסניפים. במקום פשוט לחבר את המפות במרחב התמונה, המחברים תכננו מודול מיזוג אדפטיבי במרחב פורייה. מודול זה ממיר זמנית את התכונות המשולבות לתחום התדרים, שבו דפוסים מיוצגים מבחינת שינויים איטיים ורחבים ושינויים מהירים וחדים. מנגנון סינון אדפטיבי לומד אז אילו רכיבי תדר להדגיש מהסניף הפרטים ואילו להדגיש מהסניף ההקשר. לאחר המשקלול הזה, התכונות מומרות חזרה, ומתקבל ייצוג המאחד קצוות חדים עם מבנה גלובלי עקבי ביעילות רבה יותר מאשר מיזוג שטחי בלבד.
תוצאות ברחובות אמיתיים
הצוות בחן את CGDFNet על שתי מערכות מבחן נפוצות לסצנות נהיגה עירוניות: Cityscapes, שנאסף מערים אירופאיות, ו‑CamVid, שצולם מנקודת מבט הנהג בבריטניה. CGDFNet עיבדה תמונות גדולות במהירויות בזמן אמת — כ‑88 פריימים לשנייה ב‑Cityscapes וכ‑129 פריימים לשנייה ב‑CamVid — תוך השגת דיוק סגמנטציה שמתקרב או עולה על מערכות מתקדמות רבות. היא הצטיינה במיוחד בקטגוריות שקשה בדרך כלל לסגמנט, כגון גדרות, תמרורים, אוטובוסים ואופניים, שבהן שמירה על גבולות מדויקים ומבנים קטנים קריטית.
מה זה אומר לטכנולוגיה בחיי היומיום
מבחינה מעשית, CGDFNet מראה שניתן לבנות מערכות ראייה שהן גם מהירות די־הכרה לשימוש בזמן אמת וגם מדויקות מספיק לכבד פרטים קטנים הקריטים לבטיחות בסצנות עירוניות מורכבות. על‑ידי שילוב סניף ממוקד‑פרטים, סניף ממוקד‑הקשר ושלב מיזוג חכם במרחב התדרים, הרשת שומרת על מבט מאוזן של הרחוב: היא יודעת היכן הכל נמצא והיכן כל עצם מתחיל ונגמר. אמנם נשארו אתגרים — כגון המונים צפופים או מזג אוויר קשה — אבל הגישה מציעה מתווה מבטיח לראייה עתידית על‑המכשיר, מאוטונומיה ברכב ועד מצלמות תנועה חכמות ורובוטים מסייעים.
ציטוט: Zhao, S., Fu, W., Gao, J. et al. CGDFNet: a dual-branch real-time semantic segmentation network with context-guided detail fusion. Sci Rep 16, 9191 (2026). https://doi.org/10.1038/s41598-026-39370-1
מילות מפתח: סגמנטציה סמנטית בזמן אמת, חזון לנהיגה אוטונומית, רשת נוירונים בעלת שני סניפים, מיזוג תכונות מבוסס פורייה, הבנת סצנות עירוניות