Clear Sky Science · he
מחקר על שיטת זיהוי חכמה לחלקי מכונה עם דמיון תכונות גבוה בסביבת שטח תעשייתית
מדוע חשוב לזהות חלקים שנראים זהים
מפעלים מודרניים מסתמכים על רובוטים שימצאו, יארימו ויירכיבו אלפי חלקי מתכת קטנים. רבים מהחלקים — גלגלי שיניים, מסבים, כונסים, אגוזים וברגים — נראים דומים באופן מטעה, במיוחד בתאורה קשה או כאשר הם חופפים על מסוע. אם רובוט יטעה ביניהם, התוצאה יכולה להיות תקיעות, פגמים או אפילו נזק למכונות. המחקר הזה מתמודד עם שאלה שנראית פשוטה אך בעלת השלכות תעשייתיות רחבות: כיצד מערכת ראייה קומפקטית ומהירה יכולה להבחין באופן מהימן בין חלקים כמעט זהים בתנאי סדנה ממשיים?
אתגרים בראייה בסביבה מפעלית
על רצפת המפעל, מצלמות לעיתים רחוקות נהנות מהנופים הנקיים שמופיעים בסרטוני הדגמה. התאורה אינה אחידה, ויוצרת השתקפויות חזקות על מתכות מבריקות וצללים עמוקים באזורים אחרים. חלקים נשפכים לתוך תיבות או מפוזרים על מסועים, לעתים מכסים זה את זה חלקית. להחמיר את המצב, רבים מהרכיבים המתכתיים חולקים צורות, צבעים ומרקמים דומים, כך שנותרות מעטים רמזים חזותיים ברורים. תוכנה מסורתית שמתאימה תבניות או תכונות מעשה ידי אדם מתקשה קשות בתנאים אלה: היא איטית, שבירה לשינויי תאורה ולעתים נכשלה כאשר חלקים חופפים או סובבו בזוויות בלתי צפויות.
בנייתה על גלאים חד־פעמיים מהירים
בשנים האחרונות, משפחת מודלים של אינטיליגנציה מלאכותית בשם YOLO (You Only Look Once) הפכה לפופולרית בזיהוי עצמים בתמונה בעברה אחת ומהירה. YOLOv8, אחת הגרסאות האחרונות, מאזנת כבר היטב בין דיוק למהירות ויכולה לפעול בזמן אמת. אך כאשר חלקים שונים נראים כמעט זהים, גם YOLOv8 עלול להחמיץ רמזים עדינים או לצייר תיבות לא מדויקות. ניסיונות מוקדמים לצמצם את מודלי YOLO למכשירים קטנים נטו לקצץ בפרמטרים אך גם להחליש את יכולתם לייצג פרטים עדינים — בדיוק מה שנדרש להבחין בין חלקי מכונה דומים־למראה.
רשת זיהוי צרה אך חדה יותר
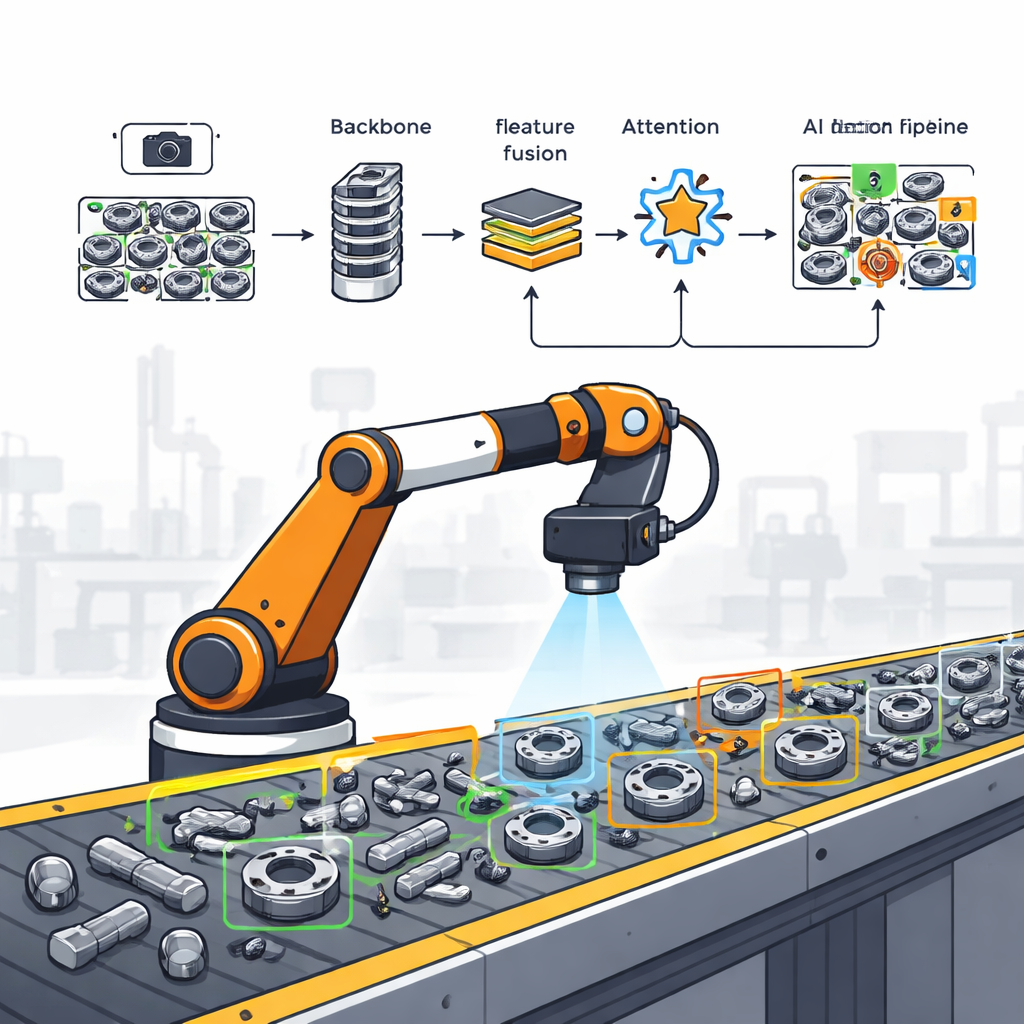
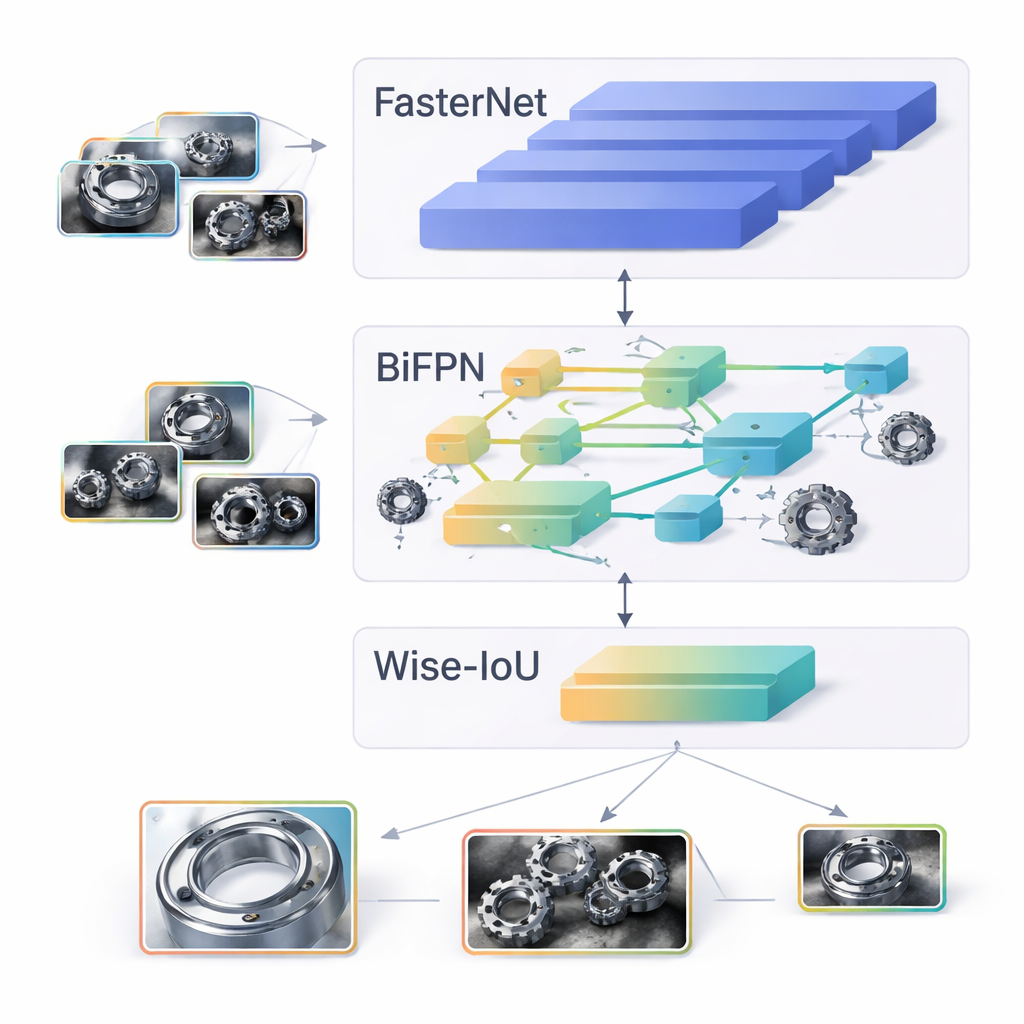
המחברים מציעים גרסה משודרגת של מודל YOLOv8 הקטן ביותר, הנקראת YOLOv8n, המותאמת במיוחד לחלקים תעשייתיים מבלבלים ולחומרה עם כוח חישוב מוגבל. ראשית, הם מחליפים את הליבה הסטנדרטית של הרשת בעיצוב חדש יותר בשם FasterNet, המשתמש בתכסיס של קונבולוציה "חלקית" כדי לעבוד רק על האזורים המועילים ביותר בתמונה בכל שלב. זה מצמצם עבודה חוזרת בזיכרון מבלי לאבד מידע חזותי מפתח. שנית, הם מעצבים מחדש את ה"צוואר" האמצעי של הרשת כדי להשתמש בפירמידת תכונות דו־כיוונית (BiFPN), שמאפשרת זרימת מידע הן מהתצפיות הגסות והגלובליות כלפי פרטים עדינים והן מהפרטים הקטנים כלפי מעלה, כך שחלקים קטנים ומוסתרים נהנים מהקשר ולהפך.
ללמד את הרשת להתעלם מרמזים רעים
מעבר למבנה הרשת, הדרך שבה היא לומדת לכוונן את ההגדרות הפנימיות שלה — מובל על ידי פונקציית אובדן — משפיעה במידה רבה על מה שהיא שמה לב אליו. שיטות אימון סטנדרטיות מתייחסות לכל הדוגמאות פחות או יותר באופן שווה, מה שאומר שתיבות אימון באיכות נמוכה (מושמעות או עמומות) יכולות להטעות את המודל. המחברים מחליפים את חוק התאמת התיבות הרגיל בשיטה בשם Wise‑IoU. במילים פשוטות, גישה זו מדרגת כל דוגמה לא רק לפי חפיפה, אלא לפי עד כמה היא "חריגה", ואז מפחיתה בשקט את השפעת אותן דוגמאות לא מהימנות. עם הזמן, המערכת לומדת בעיקר מדוגמאות ברורות ומתויגות היטב, מה שמוביל לתיבות זיהוי חדות ומהימנות יותר, במיוחד כאשר חלקים חופפים או מופיעים בתאורה קשה.
שמירת המערכת למבחן
כדי להעריך את העיצוב שלהם, הצוות בנה מאגר תמונות משלו של שישה חלקי מכונה נפוצים, כל אחד ביחס של 1,250 תמונות תחת רמות תאורה שונות ובדרגות שונות של חסימה הדדית. הם השוו את המודל המשופר שלהם ל‑YOLOv8n הסטנדרטי ולכמה גלאים קלים אחרים. המערכת החדשה השיגה איכות זיהוי כוללת גבוהה יותר תוך שימוש בפחות משני שלישים מהחישוב וצמצום מספר הפרמטרים בכ־42%. באופן ספציפי, היא שיפרה מדד מפתח בשם mean average precision בסף מקובל ב־1.5 נקודות אחוז, ועדיין רצה ביעילות מספיקה לשימוש בזמן אמת על חומרה צנועה.
מה זה אומר עבור מפעלים חכמים
במונחים פשוטים, המחקר מראה שרובוטים מפעליים יכולים להיות גם חכמים וגם קומפקטיים יותר. עם ליבת רשת מעוצבת מחדש, מיזוג תכונות חכם יותר וכלל למידה סלקטיבי יותר, מודל AI קטן יכול להבחין באופן מהימן יותר בין גלגלי שיניים, מסבים וחלקים דומים אחרים בסצנות אמיתיות ומבולגנות, אפילו כאשר התאורה לקויה והחלקים חופפים. שילוב של דיוק מוגבר ועומס חישובי נמוך מקל על פריסת ראייה חזקה במכשירי קצה זולים, ומסלל את הדרך לקווי ייצור אוטומטיים גמישים יותר ללא צורך בשרתים מסיביים או בסביבות מבוקרות לחלוטין.
ציטוט: Lu, C., Ye, X., Wu, J. et al. Research on intelligent recognition method of mechanical parts with high feature similarity in industrial field environment. Sci Rep 16, 7640 (2026). https://doi.org/10.1038/s41598-026-39036-y
מילות מפתח: זיהוי עצמים תעשייתי, חלקי מכונה, למידת עומק קלת משקל, YOLOv8, אוטומציה במפעלים