Clear Sky Science · he
מהירות תנועה של גף פוסטטי אוטונומי מעצבת הגשמה, שימושיות ותכונות חברתיות רובוטיות במציאות מדומה
למה האופן שבו זרוע רובוטית נעה באמת משנה
גפים פוסטטיים רובוטיים נעשים יותר מתקדמים בכל שנה, ומבטיחים לא רק לשחזר תנועה לאחר אובדן גפה אלא גם להרגיש כחלק טבעי מהגוף. עם זאת, שאלה הפשוטה בצורה מפתיעה שלא נחקרה היטב היא: האם המהירות שבה זרוע פוסטטית אוטונומית נעה משנה עד כמה היא מרגישה "טבעית", בטוחה ונוחה לשימוש עבור האדם שלובש אותה? המחקר הזה השתמש במציאות מדומה כדי לבדוק כיצד מהירויות תנועה שונות מעצבות את תחושת השייכות של הזרוע לאדם, את התחושה שהיא פועלת מטעמם, ואת האופן שבו היא נתפסת כשותפה אמינה במקום כמכונה רועדת.
לנסות זרוע רובוטית וירטואלית
כדי לענות על שאלה זו, החוקרים הניחו מתנדבים בסביבת מציאות מדומה סוחפת ונתנו להם גוף דיגיטלי עם לפני-זרוע שמאלית שאבדה. בעולם הווירטואלי, החלק החסר של הזרוע הוחלף בידית רובוטית אלגנטית שיכלה לכופף את עצמה. המשתתפים שלטו בכתף ובחלק העליון של הזרוע, אך כאשר המרפק הווירטואלי שלהם התקרב מספיק למטרת זוהר, האמה הפוסטטית התנדנדה אוטומטית כדי להשלים את ההושגה. התנועה התבצעה לפי מסלול חלק של "מינימום זעזוע" (minimum-jerk), סוג של מסלול מעוקל בעדינות הידוע כקרוב לתנועת אדם טבעית.

שש מהירויות שונות, משימה אחת פשוטה
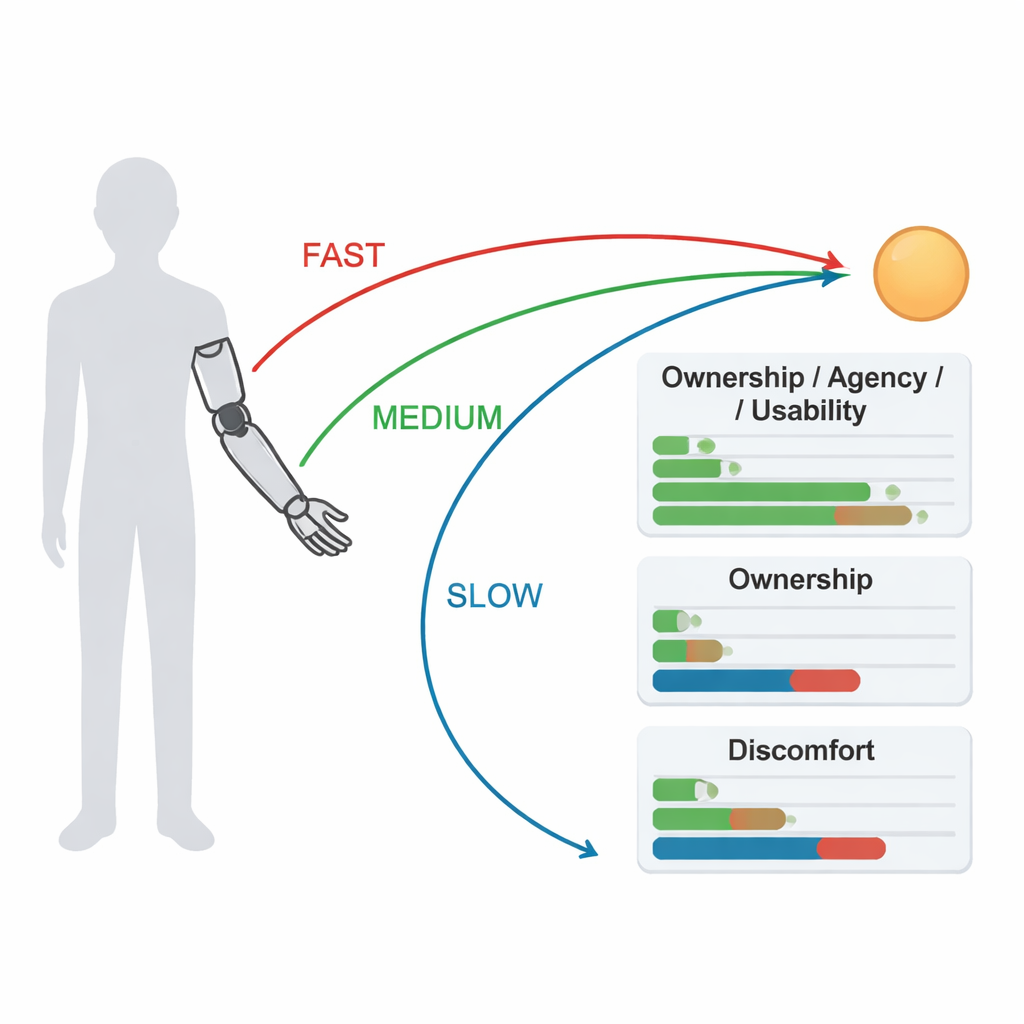
ההבדל המרכזי היה שהכיפוף האוטומטי של האמה הפוסטטית יכול להיות מהיר מאוד או איטי מאוד. הצוות בדק שש משכי תנועה, מ-125 מילי־שניות מהירות מאוד ועד 4 שניות נינוחות, עם מספר שלבים באמצע. בכל תנאי מהירות, המתנדבים ביצעו סדרת ניסויי הגעה, וניסו לגעת במטרות שמופיעות מהר ככל האפשר. לאחר כל בלוק של ניסויים הם דרגו עד כמה חזק הרגישו שהזרוע שייכת להם (בעלות על הגוף), עד כמה הרגישו שהתנועות הן "התנועות שלהם" (תחושת סוכנות), עד כמה המערכת ניתנת לשימוש, וכיצד הזרוע מדורגת בתכונות חברתיות רובוטיות כמו כשירות, חביבות ולא נוחות. החוקרים גם מדדו כמה מהר אנשים הזיזו את החלק העליון של הזרוע האמיתי שלהם לעבר המטרה לפני שהפוסטטיק השתלטה.
מהירות בינונית מרגישה הכי כחלק מהגוף
התוצאות ציירו תמונה ברורה: משך תנועה בינוני של בערך שנייה אחת ייצר את תחושת בעלות וסוכנות החזקות ביותר, כמו גם את ניקוד השימושיות הגבוה ביותר. כאשר הפוסטטיקה נעה מהר הרבה יותר (125 מ"ש) או לאט הרבה יותר (4 שניות), אנשים הרגישו פחות שהיא חלק מגופם ופחות שהיא פועלת מטעמם. תנועה מעט מהירה יותר של חצי שנייה גם עבדה היטב, ושמרה על בעלות וסוכנות גבוהות יחסית לקצוות. הדפוס הזה מציע שיש נקודת איזון במהירות שבה גף אוטונומי מרגיש גם טבעי וגם מועיל, ושמהירות יתר או איטיות גורמות למוח להתקשות לשלב את המכשיר בדימוי הגוף.
נוחות, כשירות, וכיצד אנשים מתאימים את עצמם
הדרך שבה מהירות הזרוע עיצבה את "האישיות" שלה הייתה חשובה לא פחות. תנועות במהירויות מתונות הוערכו ככישרוניות יותר מהתנועות האיטיות ביותר, בעוד שהתנועות המהירות ביותר יצרו את תחושת חוסר הנוחות הגדולה ביותר, מה שמתחבר לממצאים קודמים עם רובוטים עצמאיים. מעניין כי דירוגי החביבות — בערך עד כמה הזרוע נראתה ידידותית וניתנת לגישה — לא השתנו הרבה עם המהירות. אנשים גם שינו במעט את ההתנהגות שלהם: כאשר הפוסטטיקה נעה לאט, הם נטו להזיז את הזרוע האמיתית שלהם לאט יותר לעבר המטרה, כאילו מותאמים באופן לא מודע לקצב הרובוט. הסתגלות זו מרמזת שברגע שגף אוטונומי מוכלל חלקית, המשתמש עשוי לכוון את תנועותיו כדי לתאם טוב יותר איתו.
מה משמעות הדבר עבור גפים פוסטטיים עתידיים
ללא מומחיות מיוחדת, המסקנה פשוטה: כמה מהר גף פוסטטי אוטונומי זז הוא לא רק הגדרה טכנית; זה מעצב ישירות האם המשתמש מרגיש שהמכשיר באמת חלק ממנו והאם הוא מרגיש בטוח ובעל כשירות. במחקר במציאות מדומה זה עם משתתפים בריאים, תנועות שאורכן כעשירית שנייה — בערך שנייה אחת — מצאו את האיזון הטוב ביותר, והגדילו את תחושות הבעלות, השליטה והשימושיות תוך הימנעות מהאי־נוחות שמפעילות תנועות מהירות מדי. ככל שמכשירים פוסטטיים ורובוטיים ניידים מתקדמים יותר יחדרו לחיי היום־יום, כוונון זהיר של מהירות התנועה — ושמירה על טווח אנושי ונוח — עשוי להיות חשוב לא פחות מהוספת חיישנים או אלגוריתמים חכמים אם נרצה שהמכשירים האלה יהיו גם כלים יעילים וגם תוספות חיות ונוחות לגוף.
ציטוט: Hapuarachchi, H., Inoue, Y., Shigemasu, H. et al. Movement speed of an autonomous prosthetic limb shapes embodiment, usability and robotic social attributes in virtual reality. Sci Rep 16, 7750 (2026). https://doi.org/10.1038/s41598-026-38977-8
מילות מפתח: גפים פוסטטיים, מציאות מדומה, הגשמה, אינטראקציה בין אדם ורובוט, מהירות תנועה