Clear Sky Science · he
אסטרטגיית שיקום של נתוני מסלולי כלי רכב לזיהוי וידאו המבוססת על שיטת ביניים דו‑שלבית של סינון אינטרפולציה
למה ניקוי נתוני תנועה דיגיטליים חשוב באמת
כל פעם שמצלמת תנועה צופה ברכבים עוברים בצומת, היא מייצרת זרם נתונים נסתר שמתאר לאן כל רכב נוסע, כמה מהר הוא נע וכיצד מאט או מגביר מהירות. המידע הזה הוא נכס לשיפור הבטיחות בדרכים, לתפעול חכם של רמזורים ולנהיגה אוטונומית עתידית. במציאות, הנתונים האלה מלוכלכים: רכבים מוסתרים מאחורי משאיות, פנסים מהבהבים בגשם ומערכות ראייה ממוחשבת טועות. המחקר הזה מתמודד עם שאלה מעשית: איך להפוך את נתוני הווידאו הפגומים לרשומה מהימנה של תנועת הרכבים בפועל?
כשמצלמות קוראות תנועת רכבים בצורה שגויה
מעקב מבוסס־וידאו מושך בגלל עלותו הנמוכה, היותו לא חודרני וכיסויו אזורים נרחבים. עם זאת, התוצר הגולמי מלא בשתי בעיות עיקריות. הראשונה היא שגיאות בולטות, כגון רכב שנראה שקופץ אחורה, נעצר באופן מיידי במהירות כביש מהיר או מציג דפיקות תאוצה בלתי אפשריות. שגיאות אלה בדרך כלל נובעות מהסתרה (occlusion), טשטוש תנועה, או איבוד מעקב רגעי על ידי התוכנה. הבעיה השנייה היא רעידות אקראיות—תזוזות קטנות ומהירות בדיווח על המיקום. כאשר מחשבים מהירות ותאוצה מנקודות אלה, הרעידות מופרזות והופכות נהיגה נורמלית לנראית כאילו אינה יציבה. אם לא מתקנים זאת, הבעיות עלולות לעוות מודלים תחבורתיים ביותר מ‑40 אחוזים, מה שעלול להטעות מחקרי בטיחות ומערכות נהיגה אוטומטיות.
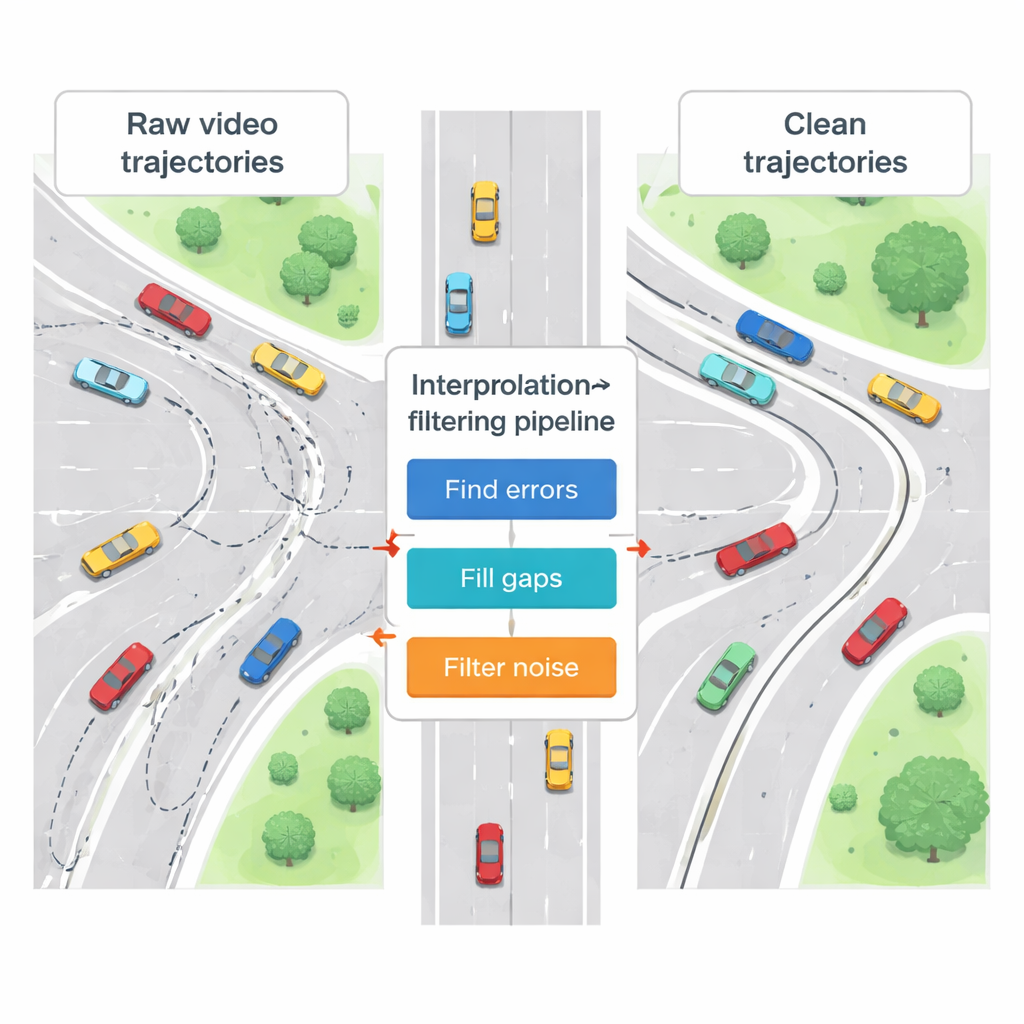
תוכנית ניקוי דו‑שלבית
כדי לתקן את הנזק, המחברים מציעים אסטרטגיית שיקום דו‑שלבית שפועלת כמו מכונאי דיגיטלי קפדני. שלב ראשון מתמקד בשגיאות בולטות: הוא סורק את רשומת כל רכב לחיפוש מהירויות ותאוצות החורגות מגבולות פיזיקליים פשוטים, כגון "ג'רק" גבוה מאוד (שינויים פתאומיים מאוד בתאוצה) או תאוצה שמעבר למה שרכב ונוהג אמיתיים יכולים לעמוד בו. ברגע שמוצאים נקודות חריגות אלה, הן מוחלפות באמצעות כלים מתמטיים שנקראים אינטרפולציה—אומדן ערכים חסרים מתוך נקודות סמוכות ואמינות יותר. המחקר משווה מספר שיטות אינטרפולציה ומגלה ששיטת הרמיט שומרת טוב יותר על הצורה הטבעית של המסלול לעומת שיטת לגראנז', בעיקר כאשר התנועה מורכבת.
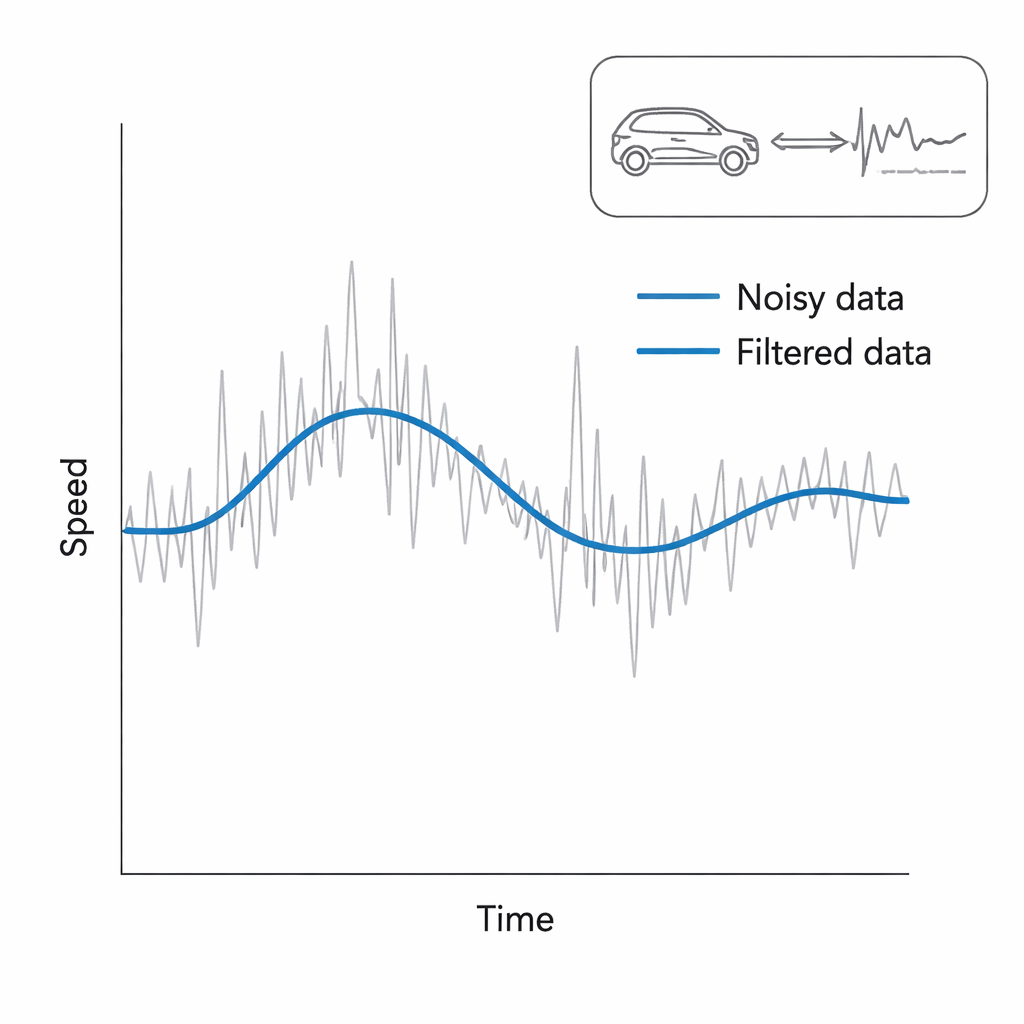
החלקת הנסיעה הדיגיטלית
שלב שני מתמודד עם הבעיה העדינה יותר של רעש. גם לאחר תיקון שגיאות גסות, העקבות הנותרות יכולות להיראות רעועות במעט. כאן החוקרים בוחנים שתי דרכים להחלקת הנתונים: שיטת ממוצע נע משופרת שנותנת משקל גדול יותר לנקודות האחרונות, וטכניקה סטטיסטית הידועה כמסנן קלמן, שמעדכנת באופן רציף את האומדן הטוב ביותר שלה לגבי מיקומו ומהירותו האמיתיים של הרכב ככל שמתקבלים מדידות חדשות. שתי הטכניקות מצמצמות את הרעידה, אבל מסנן קלמן עושה עבודה טובה יותר במעקב אחר שינויים אמיתיים בנהיגה—למשל בלימה קלה או שינוי נתיב—מבלי לטשטש אותם. התוצאה היא תיאור חלק ומציאותי יותר של אופן התנהגותו של כל רכב לאורך זמן.
בדיקת השיטה בשטח
הצוות מיישם את המסגרת על וידאו אמיתי שצולם בצומת עירוני צפוף בנז'נגג'ו, סין, באמצעות תוכנת זיהוי ומעקב עצמים מודרנית להוצאת מסלולי רכבים. לאחר מכן הם מעבירים עשרות מסלולי רכבים שונים דרך התהליך הדו‑שלבי ושופטת ההצלחה נעשית באמצעות מדדי פיזיקה פשוטים: כמה משתנה התאוצה וכמה פעמים ה"ג'רק" חורג מרמה שנחשבת לאמצעית בלתי סבירה לרכבי נוסעים. הם משווים גם את המסלולים המתוקנים לנתוני אמת שנרשמו ישירות ממכשירי הלוח מחוונים של רכב. על פני דפוסי נהיגה רבים—נסיעה יציבה, בלימה חזקה, שינוי נתיב—האסטרטגיה המשולבת של אינטרפולציה וסינון מצמצמת את תנודתיות התאוצה בכ־85 אחוז וכמעט מבטלת קפיצות ג'רק בלתי סבירות, תוך התאמה טובה יותר לרשומות המכשירים מאשר מספר שיטות מתחרות.
מה משמעות הדבר לנסיעה היומיומית
במלים פשוטות, מאמר זה מראה כיצד להפוך צילומים פגומים ממצלמות תנועה רגילות לנתונים שהמהנדסים והרכבים האוטומטיים יכולים באמת לסמוך עליהם. על‑ידי תיקון תקלות בולטות תחילה ולאחר מכן החלקה מדוקדקת של הרעש, השיטה המוצעת מפיקה עקבות דיגיטליות ריאליסטיות של תנועת רכבים, מבלי לדרוש חומרה אקזוטית או כוח מחשוב כבד. התמונה הנקייה הזו יכולה לתרום לתזמון רמזורים טוב יותר, סימולציות מדויקות יותר של עומסי תעבורה ואלגוריתמים בטוחים יותר לנהיגה אוטונומית התלויים בהבנה של התנהגות נהיגה במציאות. בעוד שהמחקר ממוקד בעיר אחת ולא מכסה עדיין את כל תנאי מזג האוויר או הכביש, הוא מציב דרך ברורה ומעשית לשימוש ברשתות וידאו קיימות כחיישנים מהימנים לדור הבא של מערכות תחבורה חכמות.
ציטוט: Ding, S., Zhang, S., Peng, F. et al. Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering. Sci Rep 16, 7428 (2026). https://doi.org/10.1038/s41598-026-38947-0
מילות מפתח: מסלול רכב, נתוני וידאו תנועה, הפחתת רעש בנתונים, תחבורה חכמה, נהיגה אוטונומית