Clear Sky Science · he
בקרה עצבית אדפטיבית מבוססת ESO לרחפן ארבע-רוטורי מול הפרעות רוח והטען
שמירה על רחפנים יציבים בעולם אמיתי מלא הפרעות
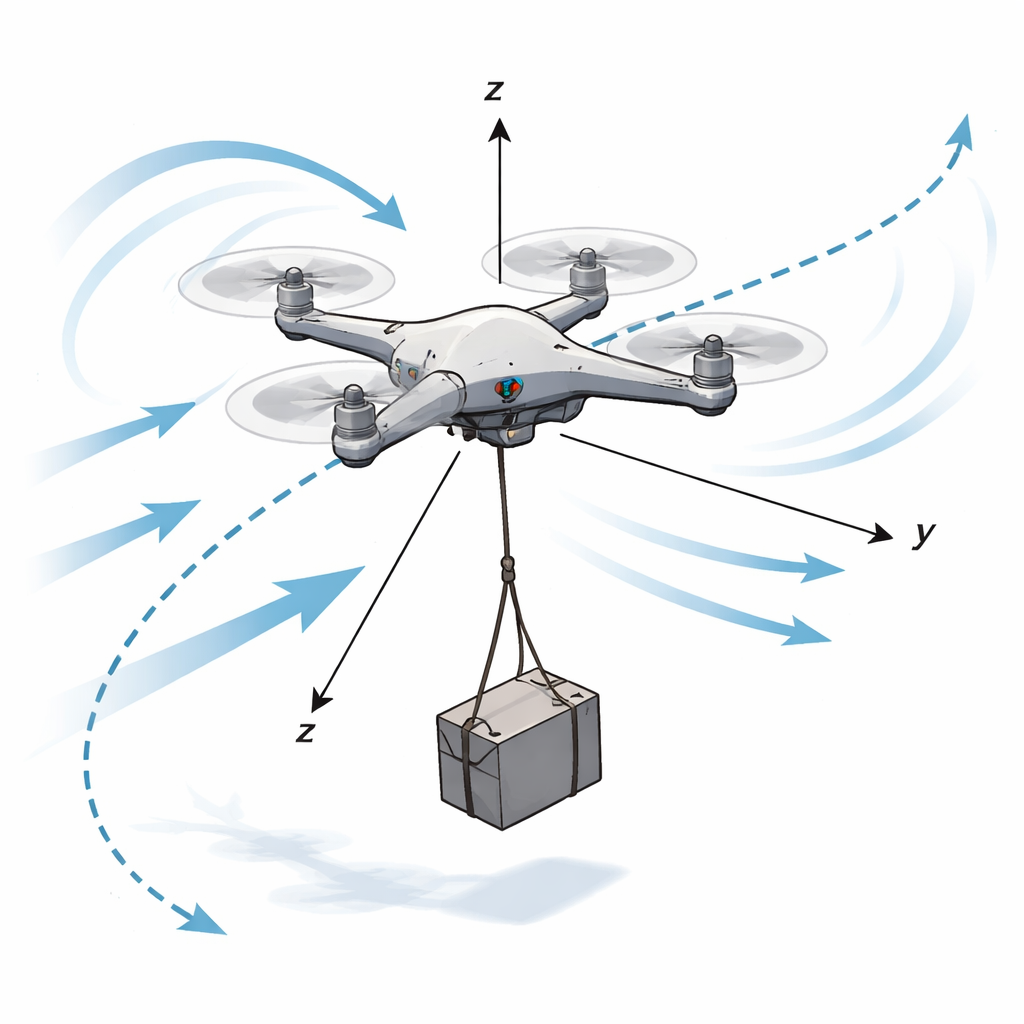
רחפנים קטנים עם ארבע רוטורים משמשים יותר ויותר למשימות כמו בדיקת גשרים, ניטור יבולים או נשיאת חבילות קטנות. אבל בעולם האמיתי, רובוטים מעופפים אלה נתקלים ברוחות פרועות ובמטענים מתנדנדים התלויים מתחתם — שני גורמים שיכולים בקלות להוציאם מהמסלול. מאמר זה מציג גישה חדשה לשמירה על טיסת הרחפן לאורך נתיב מתוכנן בצורה חלקה, גם כאשר האוויר סוער והמטען המתנדנד מושך אותו הצידה.
מדוע רוח ומטענים תלויים כל כך מטרידים
רחפן ארבע-רוטורי קשה לשליטה מטבעו. הוא קל, מגיב במהירות לשינויים קטנים במנועים והתנועה שלו בכיוונים שונים מקושרת בחוזקה. כאשר רוח חזקה או משתנה במהירות פוגעת ברחפן היא דוחפת אותו באופן לא צפוי. הוספת מטען התלוי בכבל, כמו מתקן מצלמה או בקבוק נוזל, מחמירה את המצב: המטען עלול להתנדנד כמו מטוטלת ולהעביר כוחות נוספים חזרה אל הרחפן. בקרים מסורתיים, כגון PID הנפוץ או שיטות מתקדמות כמו שחליקה מודולרית (sliding-mode) ובקרת backstepping, עובדים טוב רק כאשר מהנדסים מכירים את המודל הפיזי של הרחפן במדויק וכאשר ההפרעות מתונות. אם המודל המתמטי לא מדויק, או אם כוחות הרוח והמטען משתנים בצורה מסובכת, שיטות אלו עלולות לתת תגובות איטיות, לייצר גלישה מעבר ליעד או רעידות ניכרות במהלך הטיסה.
כלב שמירה חכם להפרעות חבויות
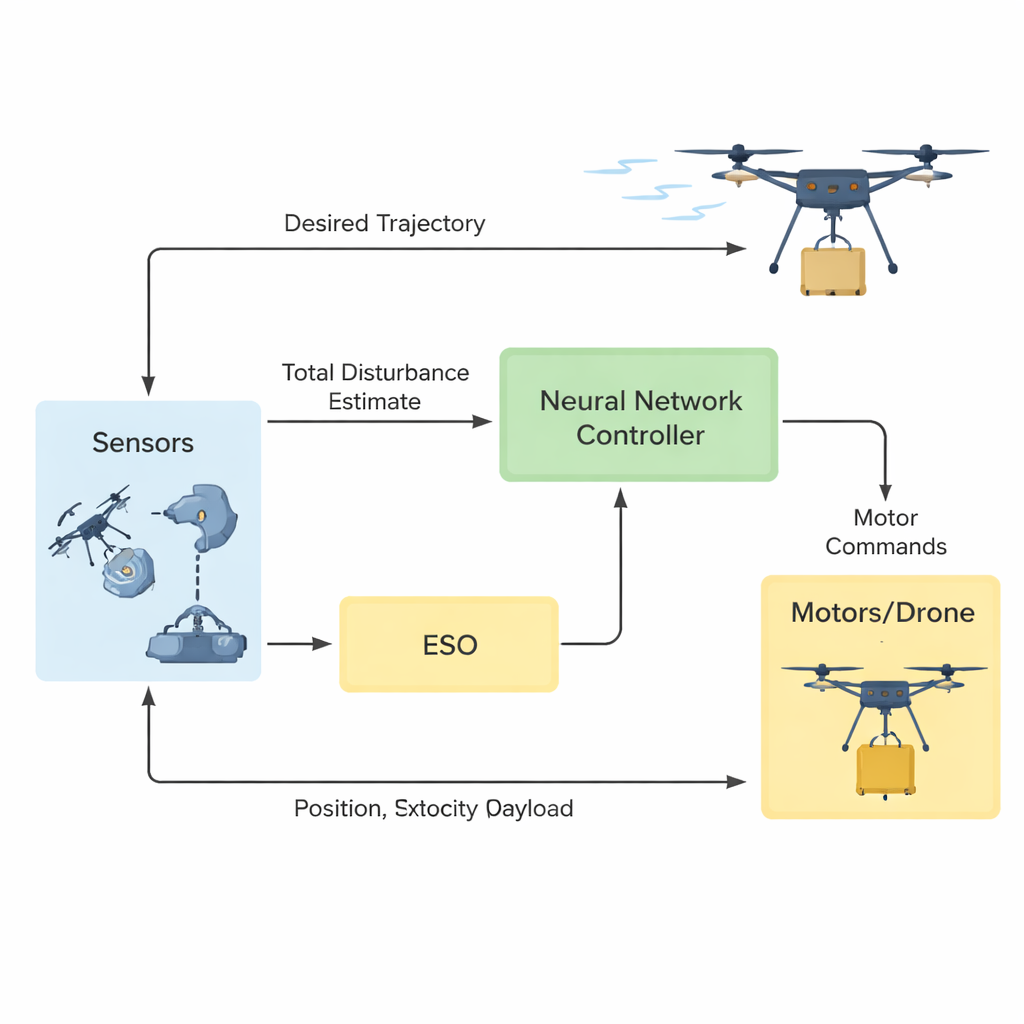
כדי להתמודד עם זאת, המחברים בונים על מושג הקרוי דחייה פעילה של הפרעות (active disturbance rejection). במקום לנסות לדמות כל פרט ברוח ובמטען המתנדנד, הם מטפלים בכל ההשפעות הבלתי ידועות יחד כ"הפרעה מצטברת" אחת. צופה מצב מורחב (extended state observer) שעוצב במיוחד פועל כמו כלב שמירה מתמטי, ומסיק ברציפות את ההפרעה הכוללת מתוך תנועת הרחפן. מה שמייחד את הצופה שלהם הוא כוונון עם פרמטר עיקרי אחד בלבד, מה שמפשט מאוד את ההקמה בהשוואה לעיצובים רבים קיימים. התיאוריה מראה כי עם כוונון נכון, האומדן של הצופה לגבי ההפרעה מתכנס במהירות ונשאר בקבוצה קשיחה, כלומר ניתן להסתמך עליו כתיקון חזיתי בזמן אמת ולא רק כשערוך גס.
לתת לרשת עצבית ללמוד את החלקים הקשים
אפילו עם אומדנים טובים להפרעה, הבקר עדיין צריך לדעת כיצד הפקודות למנועים מתורגמות לתנועה ממשית — יחס התלוי במסה, בגיאומטריה ובפרטים פיזיקליים אחרים שעשויים להשתנות עם הזמן. במקום להישען על מודל מזוהה בקפדנות, המחברים מציגים רשת עצבית מבוססת פונקציות יסוד רדיאליות (RBF) שלומדת את היחס הזה ישירות מתוך אותות הטיסה. הבקר צריך רק לדעת את מיקום הרחפן, את היעד שאליו עליו להגיע ואת הנגזרת השנייה של המסלול הרצוי (מהירות שינוי התאוצה של הנקודה הרצויה). חוק אדפטיבי מעדכן ברציפות את המשקלים הפנימיים של הרשת העצבית כדי לצמצם שגיאות מעקב. באמצעות ניתוח מבוסס ליאפונוב, המחברים מוכיחים שבמסגרת הסכמה אדפטיבית זו שגיאות המעקב נשארות חסומות באופן אחיד וניתן להקטינן ככל שירצו, בעוד עדכוני המשקלים נשארים יציבים.
בדיקה של השיטה במבחן מעשי
הצוות מאמת את הגישה שלהם הן בסימולציות ממוחשבות והן בניסויים מעשיים. בסימולציות נדרש הרחפן לעקוב אחר מסלולי ספירלה תלת־ממדיים מאתגרים בזמן שהוא נדחף על ידי משבי רוח אקראיים וכוחות מטען שמשתנים עם הזמן. הבקר החדש משווה לשלוש שיטות מתקדמות אחרות: דחייה פעילה לינארית של הפרעות, בקרה בסגנון sliding-mode, בקרה ללא מודל מסוג terminal sliding-mode, ובמבחן קשה יותר — בקרה אדפטיבית מסדר־שבר. בתרחישים מרובים, השיטה המוצעת משיגה מסלולים חלקים יותר ושגיאות מיקום RMS קטנות יותר, במיוחד לאחר הכנסת הפרעות. בניסויים פיזיים טסו המחברים ברחפן במרחב פנימי כאשר שני מאווררים תעשייתיים נשאו אוויר אליו ובקבוק מים במשקל 200 גרם היה תלוי מתחתיו. מצלמות תפיסת תנועה הקליטו את מיקום הרחפן. גם תחת רוח רציפה ומשיכות ידניות על המטען, הרחפן החזיק את נקודת היעד במרחק של כמה סנטימטרים בלבד והפקודות למנועיו נשארו בסדר, מה שמעיד על כך שהשיטה מעשית לחומרה אמיתית.
מה המשמעות לכך לשימוש יומיומי ברחפנים
לאנשי חוץ־תחום, המסקנה העיקרית היא שעבודה זו מציעה דרך להפוך רחפנים ליותר אמינים בתנאים קשים מבלי לדרוש ידע מושלם של הפיזיקה הפנימית שלהם. בשילוב צופה הפרעה פשוט אך חזק עם בקרה מבוססת למידה, המערכת יכולה להסתגל בזמן טיסה למשבי רוח ומטענים מתנדנדים, ולשמור על הרחפן במסלול עם מאמץ כוונון מינימלי. בקרת חזקה וקלה למודל מסוג זה עשויה להקל על פריסת רחפנים למשימות שגרתיות בערים, בחוות ובמפעלים, והרעיונות עשויים בסופו של דבר להתפתח לצוותי רחפנים ולעיצובים חסינים לתקלות ששומרים על טיסה בטוחה גם כאשר חלק מהרכיבים נכשלים.
ציטוט: Cai, X., Dai, J., Liu, F. et al. ESO based adaptive neural network control for a quadrotor against wind and payload disturbances. Sci Rep 16, 7758 (2026). https://doi.org/10.1038/s41598-026-38931-8
מילות מפתח: בקרת רחפן ארבע-רוטורי, יציבות רחפן, הפרעת רוח, בקר רשת עצבית, מעקב מטען