Clear Sky Science · he
הלבנה ב-PCA משפרת את הסובלנות לתאורה בזיהוי מקומות חזותי עם חתימות פורייה
רובוטים שמוצאים את דרכם בתוך מבנה
דמיינו רובוט הנע בבית או במשרד שבו יש שמש חזקה ביום אחד ולפידים עמומים ביום אחר. כדי לדעת היכן הוא נמצא, הרובוט משווה את מה שמצלמתו רואה עכשיו לתמונות שאחסן קודם. אבל כאשר התאורה משתנה באופן דרמטי, מקומות עלולים להיראות כמעט בלתי ניתנים לזיהוי. עבודה זו בוחנת שיטה מתמטית חפופה לזיהוי מקומות מתמונות פנורמיות, ומציגה כיצד טריק סטטיסטי הנקרא הלבנת PCA הופך שיטה זו לעמידה הרבה יותר לשינויים בתאורה.
לראות את העולם כגלים, לא כפיקסלים
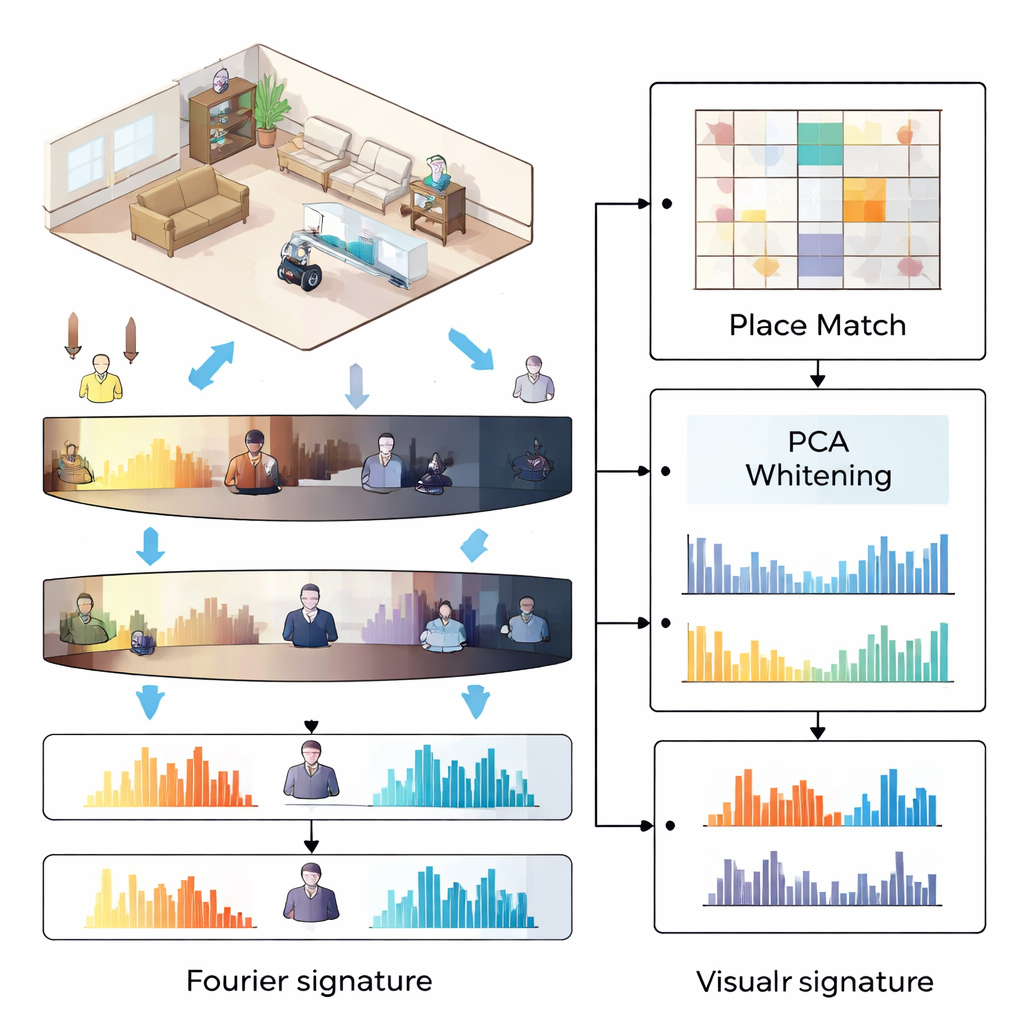
רוב מערכות זיהוי המקומות המודרניות משתמשות בפרטים קטנים רבים בתמונה—קצוות, פינות ומרקמים—ואז מסכמות אותם ל"טביעת אצבע" קומפקטית. לעומתם, עבודה זו מתבססת על חתימות פורייה, שמתייחסות לתמונה פנורמית לא כאל רשת פיקסלים אלא כאל תערובת של גלים בתדרים שונים. המצלמה לוכדת תצפית סיבובית של 360 מעלות; הפנורמה מחולקת לרצועות אופקיות, וכל רצועה מומרת לספקטרום תדירות חד־ממדי. נשמרות רק העוצמות (אמפליטודות) של התדירויות הנמוכות ומסודרות לתיאורן. מאחר שהשיטה זנחה מידע על מיקום התכונות לאורך המעגל, התיאור כמעט שלא משתנה כשהרובוט מסתובב, מה שהופך אותו לעמיד באופן טבעי לסיבוב.
מדוע תאורה שוברת חתימות פשוטות
למרות שחתימות פורייה קומפקטיות ומהירות לחישוב, הן עדיין מתקשות כאשר התאורה משתנה משמעותית בין הקלטות של אותו מקום. תמונות טבעיות נוטות להכיל אנרגיה רבה יותר בתדירויות נמוכות מאשר גבוהות, וחוסר האיזון הזה מושפע מתנאי התאורה. כתוצאה מכך, חלקים מסוימים בתיאור דומיננטיים במדד הדמיון, והרבה ערכים קשורים זה בזה בחוזקה כי שורות סמוכות בפנורמה נראות דומות. בלי תיקון, ההחלטה של המערכת האם שתי תמונות מציגות את אותו מקום מונעת על ידי תת־קבוצה קטנה ומעודפת של ערכים, דבר שהופך אותה לשברירית בתנאי תאורה שונים.
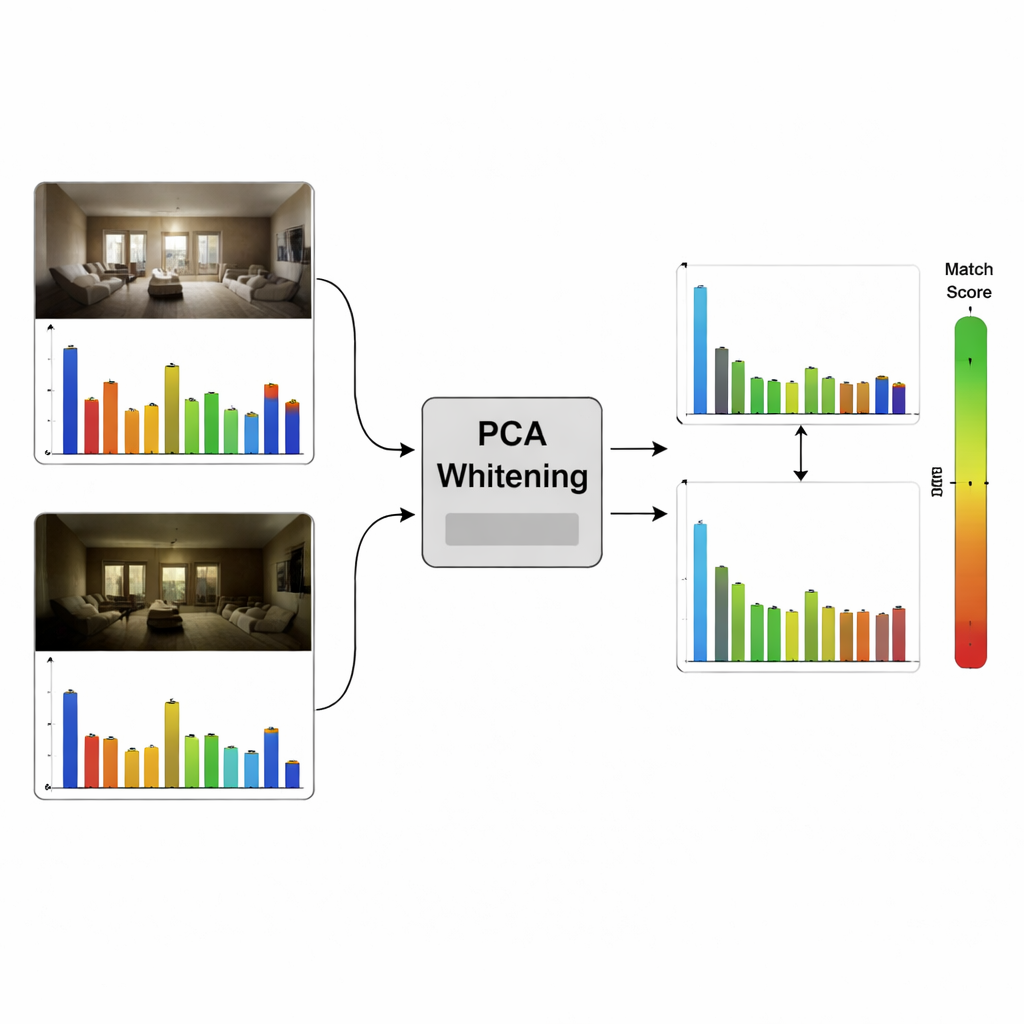
לנקות את האות עם הלבנת PCA
המחבר מציע להוסיף הלבנת PCA כשלב עיבוד לאחר מכן לתיאורים מבוססי פורייה. באמצעות אוסף פנורמות אימון משבעה סביבות פנים, המערכת לומדת כיצד ערכי התיאור נוטים להשתנות ולהיות קשורים זה לזה. הלבנת PCA מאתחלת מחדש את מרכזיות התיאור, מסובבת אותו לכיוונים של שונות בלתי תלויה, ומקנה סקייל אחיד לכל כיוון כך שלכולם תהיה השפעה שווה. זה מסיר קורלציות מיותרות ומאזן את תרומת התדרים השונים. מאחר שהערכים המומרצים ממוינים לפי חשיבות, ניתן גם לקצר בבטחה את התיאור על ידי חיתוך הזנב. ניסויים בשלוש סביבות חדשות עם וריאציות תאורה מרובות מראים שההלבנה מגדילה בעקביות את הסיכוי שהמקום הנכון יופיע בין המועמדים המובחרים, במיוחד במקרה המעשי של החזרת רשימה קצרה של התאמות סבירות.
קל משקל אך תחרותי לעומת למידה עמוקה
כדי להעריך כיצד גישה מלוטשת זו מתמודדת מול הטרנדים הנוכחיים, המאמר משווה אותה ל-AnyLoc, שיטת זיהוי מקומות חזותי עדכנית המבוססת על רשת טרנספורמר חזותית רבה־ממדים. AnyLoc גם משתמש בדחיסה מבוססת PCA, אך מתחיל מתכונות בממד גבוה שמניבות רשתות למידה עמוקה. על מערך פנורמי פנימי, חתימות פורייה מוארות (whitened) משתוות ולעתים עוקפות את AnyLoc כאשר המערכת מורשת להציע עד כעשר תמונות מועמדות, נקודת תפעול ריאליסטית עבור רובוטים רבים. והחשוב מכל, השיטה מבוססת פורייה זולה בהרבה להפעלה: היא מסתמכת על ממירי פורייה מהירים ועל פעולות מטריצה פשוטות ב-CPU, בעוד AnyLoc זקוקה ל-GPU עוצמתי ולזמן עיבוד משמעותי יותר לכל תמונה.
מה זה אומר לרובוטים יומיומיים
לקורא שאינו מומחה, המסר המרכזי הוא ששימוש חכם במתמטיקה קלאסית יכול עדיין להתחרות בבינה מלאכותית כבדה במשימות מסוימות. על ידי המרה של תמונות פנורמיות לתיאורים מאוזנים וללא קורלציות, הלבנת PCA הופכת שיטה פשוטת מבוססת תדרים לעמידה הרבה יותר לשינויים בתאורה. רובוטים המשתמשים בגישה זו יכולים למקם את עצמם באופן אמין בבתים ובמשרד תחת טווח רחב של תנאי תאורה, תוך שימוש במשאבי חישוב צנועים. הדבר הופך ניווט חזותי עמיד לנגיש יותר לרובוטים קטנים וזולים שעשויים יום אחד לשתף את החללים היומיומיים שלנו.
ציטוט: Offermann, L. PCA whitening improves the illumination tolerance for visual place recognition with Fourier signatures. Sci Rep 16, 6148 (2026). https://doi.org/10.1038/s41598-026-38929-2
מילות מפתח: זיהוי מקומות חזותי, רובוטים ניידים, דימות פנורמי, חתימות פורייה, הלבנת PCA