Clear Sky Science · he
שיפור שיטת Pure Pursuit עם בקרה דינמית על ההיגוי לרובוטים ניידים אוטונומיים ויישום לניווט בטוח במפעלי כימיה
רובוטים שנשארים על המסלול
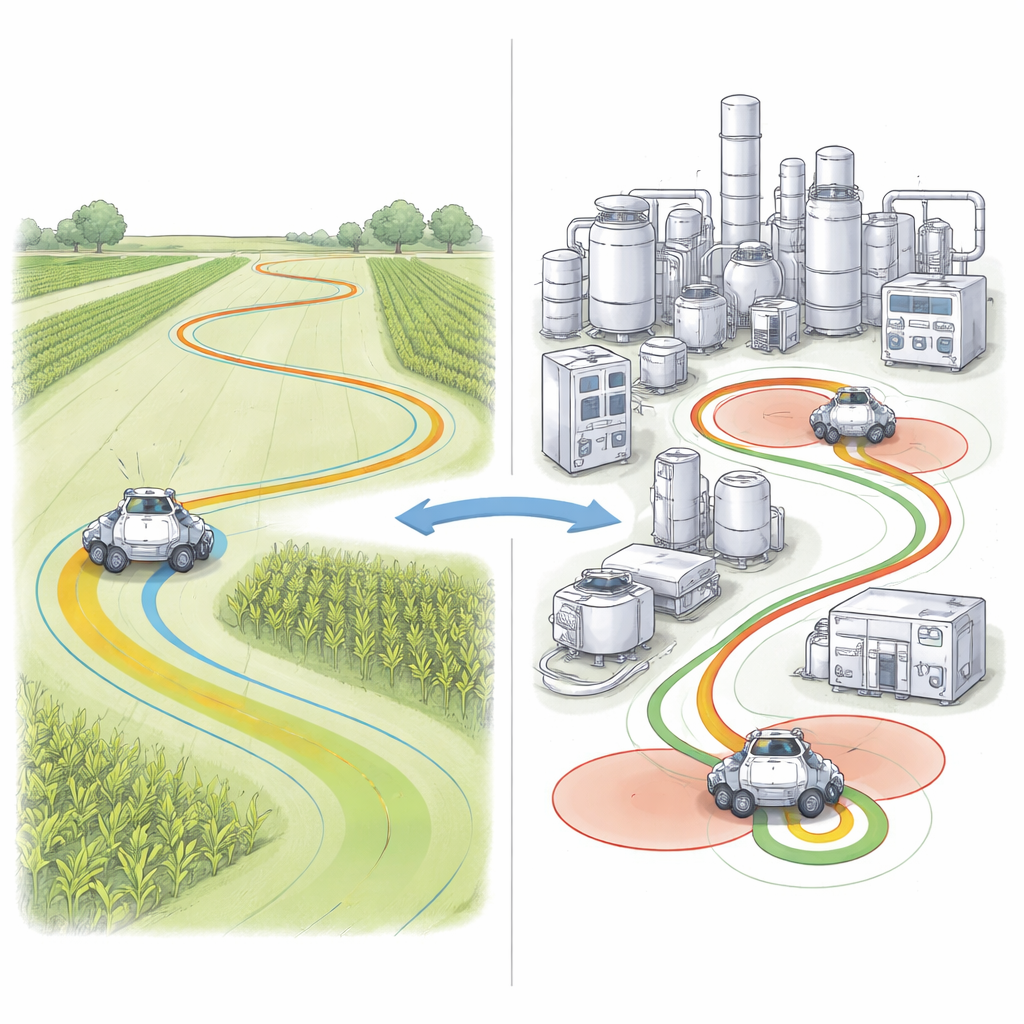
כשהרובוטים יוצאים מהמפעלים המסודרים ונסחפים לשדות ואל מפעלים כימיים, הם חייבים ללכת על מסלולים צרים בדיוק רב. סטייה קטנה עלולה למעוך יבולים, לפגוע בצינורות או להתגלגל לאזור בו יש גזים דליקים. מאמר זה מתאר שיטה חדשה לרובוטים גלגליים להיגוי ולבקרת מהירות, שמאפשרת להם להישאר קרובים לנתיב המתוכנן הן במרחבים פתוחים והן באתרים תעשייתיים צפופים.
מדוע הנחיית רובוט קשה
רוב הרובוטים הניידים האוטונומיים היום משתמשים בכלל פשוט שנקרא “pure pursuit” לעקיבת מסלול. הרובוט מסתכל כמה מטרים קדימה לאורך הנתיב, מכוון לנקודה ההיא וחוזר על התהליך במהירות. במציאות, המהנדסים צריכים להחליט מה המרחק שהרובוט “מסתכל” ומתי הוא זז. אם המרחק קצר מדי, הרובוט תגובתי ויכול להתנודד מצד אל צד. אם הוא ארוך מדי, התגובה איטית והוא קוצץ פינות, במיוחד בפניות חזקות או במהירויות גבוהות. בחוץ נוצרת עוד בעיה: מיקום הרובוט מוערך משילוב של אותות לוויין, חיישני תנועה ומדידת הסיבוב בגלגלים, שלכל אחד מהם שגיאות ועיכובים משלו.
דרך חכמה יותר להיגוי וקביעת מהירות
המחברים מציעים שיטה משופרת הנקראת Pure Pursuit with Dynamic Steering Control (PP-DSC). במקום להשאיר את מרחק המבט ומהירות הנסיעה קבועים, הרובוט מתאים את שניהם בזמן אמת בהתאם לחדות הסיבוב. כאשר זווית ההיגוי קטנה והדרך כמעט ישרה, הרובוט משתמש במרחק מבט ארוך ומהירות גבוהה לנסיעה חלקה ויעילה. ככל שזווית ההיגוי עולה בפניות, מרחק המבט מתקצר ומהירות הנסיעה יורדת אוטומטית, מה שנותן לרובוט יותר זמן להגיב ומפחית החלקה צידית. ההתנהגות הזו ממומשת על רובוט ארבע-גלגלי בדמות רכב שמשתמש במסגרת תוכנה רובוטית מודרנית יחד עם מיקום לווייני מדויק, חיישן תנופה ומצפני גלגלים לאמידת תנועתו.

בדיקות בשדות ובמפעלים כימיים וירטואליים
כדי לבדוק את ביצועי PP-DSC הצוות ערך ניסויים חיצוניים על שלושה מסלולים בסיסיים: קו ישר, לולאה ודמות שמונה, במהירויות של 1 עד 5 מטר לשנייה. השוו את השיטה החדשה לגישת pure pursuit הסטנדרטית. הבקר המתקדם שמר על הרובוט קרוב הרבה יותר לנתיב המיועד בכל המקרים. בקווים ישרים טעות הצידה הממוצעת ירדה לכדי כ־5 סנטימטרים, ובמסלולים מעוקלים הטעות נשמרה מתחת ל־8 סנטימטרים. לעומת זאת, השיטה המסורתית יכולה להתרחק לעשרות סנטימטרים והציגה שיאים גבוהים יותר בעת כניסה ויציאה מפניות, במיוחד במהירויות גבוהות.
הוספת בטיחות באיזורי סיכון
החוקרים גם בדקו כיצד רובוט כזה עלול להתנהג בתוך מפעל כימי, שם הוא יכול לבצע בדיקות על מיכלים חמים או לשאת דגימות. במקום לבנות מגרש ניסוי תעשייתי מלא, השתמשו במודל מחשב מפורט של מפעל ביודיזל שכלל מיקומי ציוד ואזורים בסיכון גבוה לשרפה ולהתפוצצות. הם הרחיבו את הבקר עם גורם בטיחות שמאט את הרובוט אוטומטית כשנכנס לאזורים מסוכנים, בהתבסס על מדד אש והתפוצצות סטנדרטי בבטיחות תהליכים. סימולציות הראו שגרסה זו המודעות לבטיחות הגבירה מעט בלבד את טעות העקיבה — פחות מאחוז בממוצע — תוך שמירה על הפחתת מהירות הרובוט סביב ציוד מסוכן.
בחירת הכלי המתאים לכל משימה
ממצא מעניין הוא שלא הייתה אסטרטגיית היגוי אחת הטובה בכל מקום. בשדות פתוחים עם עיקולים מתונים, השיטה הדינמית הצטיינה על הגישה המסורתית, ושמרה על מסלול הדוק וחלק גם במהירויות גבוהות. בגיאומטריה הצפופה של מפעל כימי, עם זאת, pure pursuit הפשוטה עם מרחק מבט קבוע לפעמים התנהגה טוב יותר, במיוחד על לולאות צרות ומסלולי “שמונת” עם חצייה עצמית שבהם מרחק המבט הדינמי עלול להעביר בטעות את הרובוט לסניף הלא נכון של המסלול. המחברים מסכמים כי יש להחליף בין אסטרטגיות בהתאם לצורת הנתיב: להשתמש בבקר המשודרג המשולב בבטיחות לעיקולים מתונים ולנסיעה מודעת סיכונים, ולחזור לסכמת מרחק־מבט קבועה למסלולים צפופים או חבוטים מאוד. עבור שאינם מומחים, המסר המרכזי הוא שניווט רובוטי בטוח ומהימן במפעלים ושדות אמיתיים אינו עניין של מפות וחיישנים בלבד — אופן בחירת הנקודה שהרובוט “מסתכל” אליה וקביעת מהירותו חשובים לא פחות.
ציטוט: Promkaew, N., Junhuathon, N., Phuphaphud, A. et al. Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants. Sci Rep 16, 8820 (2026). https://doi.org/10.1038/s41598-026-38695-1
מילות מפתח: רובוטים ניידים אוטונומיים, עקיבת מסלול, בקרת היגוי, ניווט GNSS-RTK, בטיחות במפעל כימיקלי