Clear Sky Science · he
זיהוי מטרות קל משקל ומעקב מרובה מטרות לבדיקת כלי טיס בלתי מאוישים במכרות פתוחים
עיניים חכמות יותר בשמיים
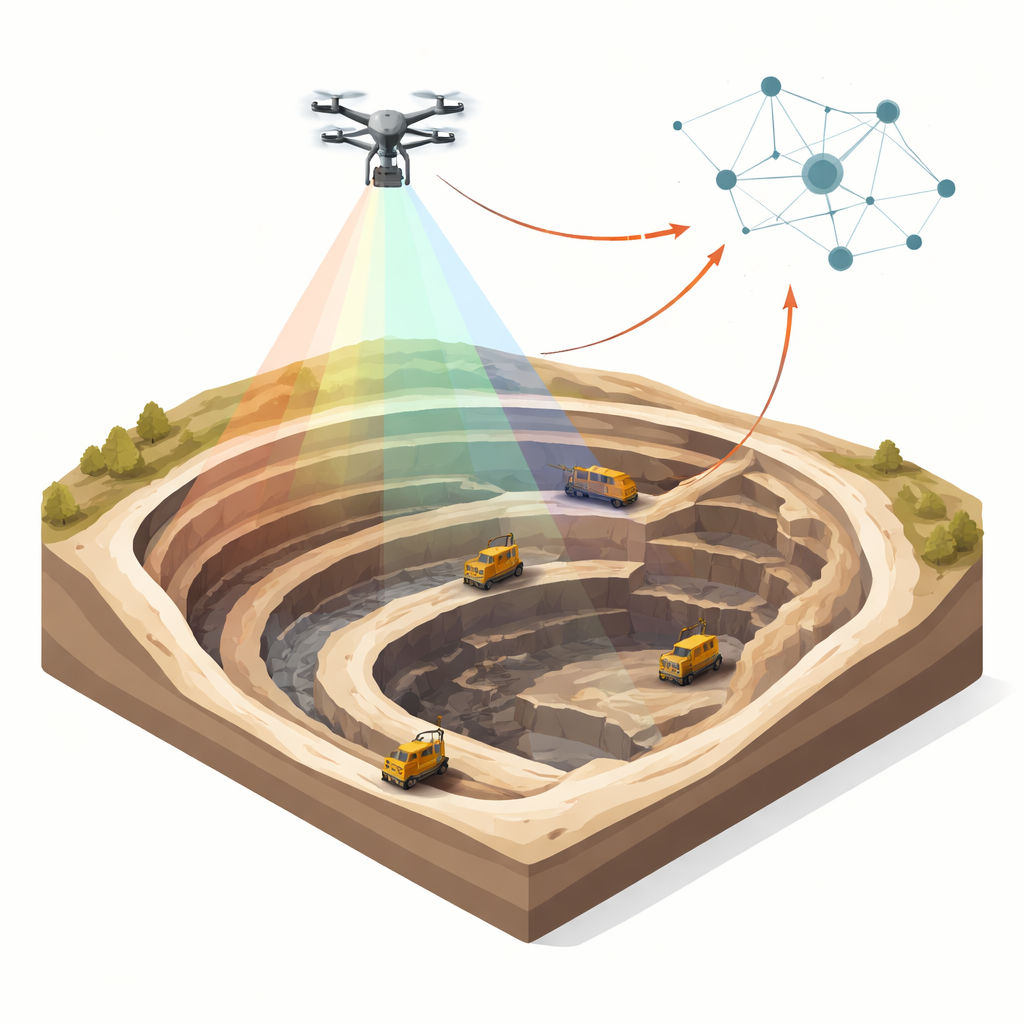
מכרות פתוחים הם מקומות עצומים וקשים, שבהם משאיות כבדות, מחפרים ואנשים נעים כל הזמן. שמירה על בטיחות ותפעול חלק דורשת בדרך כלל עובדים רבים בשטח וציוד מיקום יקר, ועדיין תקלות קטנות ומפריעים עלולים לחמוק. מאמר זה חוקר כיצד רחפנים חכמים וקלי משקל יכולים לסייר במכרות אלה מהאוויר, לזהות אוטומטית ציוד, אנשים ובעיות בזמן אמת תוך כדי עמידה במגבלות החישוב הקפדניות של האלקטרוניקה על הלוח.
למה למכרות צריך שומרי ראש טובים יותר
מכרות מודרניים כבר מסתמכים על כלים כמו מיקום לווייני ומקלטי רדיו מיוחדים כדי לעקוב אחרי משאיות ומכונות. אך מערכות “אקטיביות” אלה סובלות מנקודות עיוורון: אותות יכולים להיחסם על ידי קירות תלולים, אבק או הפרעות, והן פועלות רק על כלי רכב ואנשים הנושאים את המכשירים המתאימים. הן גם אינן יכולות להראות כיצד נראית תקלה בפועל. לעומת זאת, רחפנים יכולים לטוס מעל שטחים קשים, לצלם תמונות וסרטונים עשירים ולעקוב אחרי מטרות לא משתפות פעולה כמו כלי רכב פולשים. האתגר הוא שאלגוריתמי ראייה חזקים בדרך כלל דורשים מחשבים כבדים, בעוד שלרחפנים יש מגבלות משקל, צריכת חשמל וקיבולת עיבוד. המחברים שואפים לתכנן מערכת זיהוי ומעקב שהיא גם מדויקת וגם קלה מספיק כדי לרוץ ישירות על הרחפן.
ללמד רחפנים לראות מטרות קטנות ומוסתרות
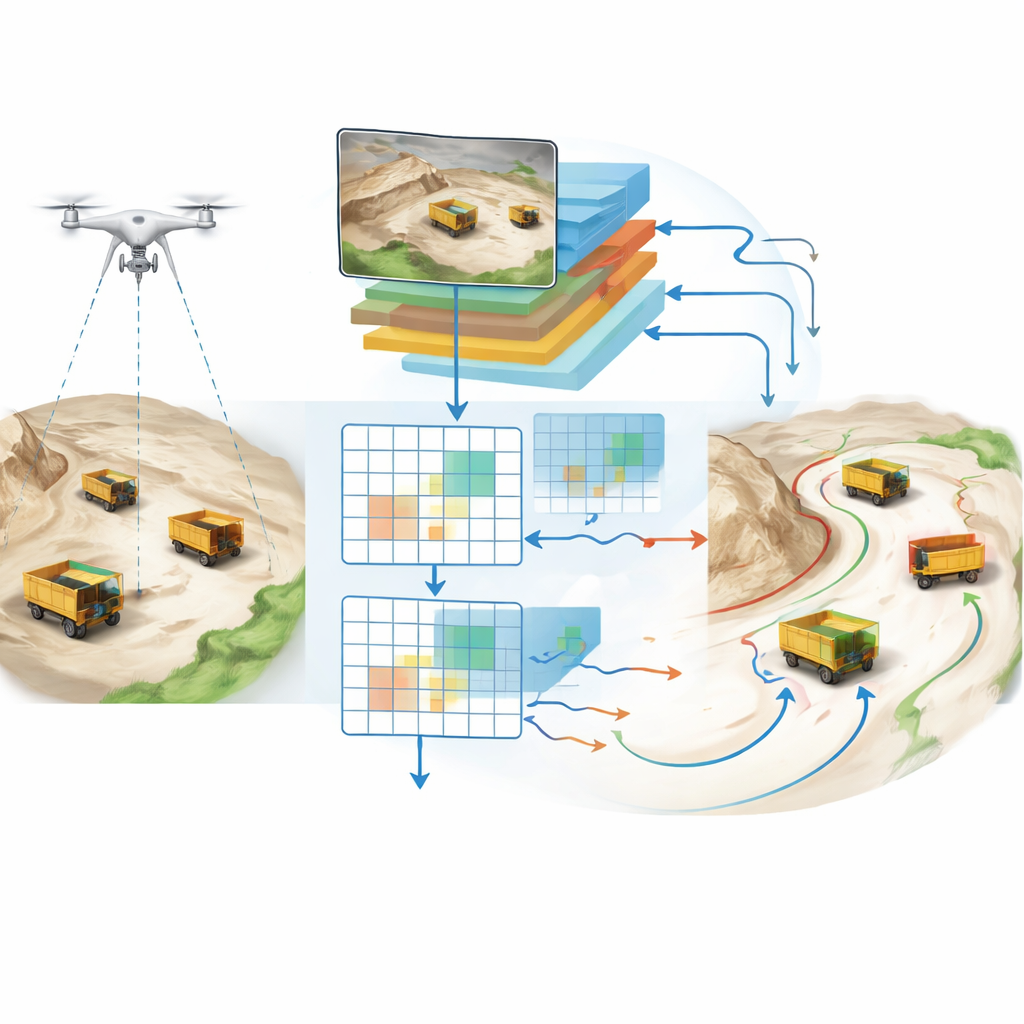
בלב העבודה עומדת גרסה משודרגת של מודל ראייה פופולרי בשם YOLO, מכווננת במיוחד למכרות פתוחים. החוקרים מעצבים מחדש את ה"גב" של המודל כדי שיוכל לעקוב אחרי קווי המתאר הלא סדירים של משאיות, מחפרים וצברי סלע, במקום להסתמך על מסננים קשיחים בדמות מטריצה. הם גם משנים את החלק ברשת שממזג מידע מסולמות תמונה גסות ועדינות, כך שמכונות קטנות מרחוק וגדולות בקרבה נתפסות יחד בלי בלבול. בנוסף, מודול החלטה חדש וקל משקל ממקד את תשומת הלב בפרטים המידעיים ביותר בסצנה, ועוזר למערכת להבחין בנקודות כשל קטנות ומכונות החצי-מוסתרות מהרקע העמוס.
להתאים מודלים חזקים לרוץ על רחפן
גם עם שיפורים אלה, מודל ראייה עלול לגדול במהירות להיות כבד מדי עבור חומרת הרחפן. כדי לפתור זאת, הצוות מיישם אסטרטגיית גזיזה מדויקת שבוחנת אילו חיבורים פנימיים תורמים הכי הרבה לביצועים ואז גוזרת את השאר. תהליך זה מצמצם את מספר הפרמטרים וכמות החישובים תוך שמירה על מסלולים חזקים ברשת. ברמת גזיזה מיטבית, המערכת שומרת על דיוק זיהוי גבוה אך מקטינה את גודל המודל, כמות הפעולות וזמן התגובה מספיק כדי לרוץ על מעבד ממוקם קומפקטי, באמצעות פחות צריכת חשמל והארכת זמן הטיסה. ניסויים על מערך נתונים מותאם למכרה ועל מבחן דרון ציבורי מראים שהמודל המזוצץ עולה על מספר חלופות מוכרות, במיוחד עבור מטרות קטנות וחלקית מוסתרות.
מצילומי סטילס למסלולים חלקים
זיהוי עצמים בתמונה אחת הוא רק חצי מהסיפור; מכרות גם צריכים לדעת כיצד כל משאית או אדם נעים לאורך הזמן. לשם כך, המחברים משפרים גישת מעקב מרובה עצמים קיימת כך שתטפל טוב יותר בסצנות צפופות, בכלי רכב דומים ובשינויים חדים בתנועה. הם יוצרים מדד דמיון משולב שמתחשב במיקום המטרה, במראה שלה ואפילו האם היא נראית עמוסה או ריקה. כמו כן הם מתקנים את תחזיות התנועה כדי להתחשב בשינויים בתאוצה, למשל כאשר משאית פונה או מטפסת מדרון. צעדים אלה יחד מקטינים החלפות זהות—כאשר כלי רכב אחד משתנה באבחנה לכלי רכב אחר—ומשמרים קווי מעקב חלקים ואמינים, וכל זאת בשמירה על מהירות מספקת לשימוש בזמן אמת על חומרת רחפן.
לקראת סיורי שמירה בלתי מאוישים ותמיד-פעל
לבסוף, המחברים משלבים את מודולי הראייה והמעקב שלהם בתוך מערכת בדיקה רב-שכבתית שיכולה לתאם מספר רחפנים, להזרים נתונים דרך 5G וקישורים אד-הוק ולהזין תוצאות אל מרכז פיקוד קרקעי. בניסויים מעל מכרות אמיתיים, ההתקנה הזו משפרת באופן דרמטי את הדיוק והיציבות של ניטור הציוד בהשוואה לשיטות מסורתיות. עבור קהל שאינו מומחה, המסקנה המרכזית היא שהמחקר מראה נתיב מעשי להפעלת רובוטים מעופפים קטנים ויעילים המשגיחים בעקביות על אתרי תעשייה עצומים, ומזהים תקלות קטנות, מבקרים לא רשומים ומצבי סיכון לפני שהם מתדרדרים—בלי צורך במחשבים מגושמים או ברשת צפופה של משדרים על כל כלי רכב.
ציטוט: Liu, G., Zhang, L., Lei, J. et al. Lightweight target detection and multi target tracking for UAV inspection in open pit mines. Sci Rep 16, 8084 (2026). https://doi.org/10.1038/s41598-026-38676-4
מילות מפתח: בדיקת רחפנים, כרייה פתוחה, זיהוי עצמים, מעקב מרובה עצמים, מודלים קלים של בינה מלאכותית