Clear Sky Science · he
ממשק מוח‑מכונה תוך־קורטיקלי המבוסס על פעילות הפרה־מוטורית הוונטראלית של מקאק
ללמד את המוח להזיז מצביע
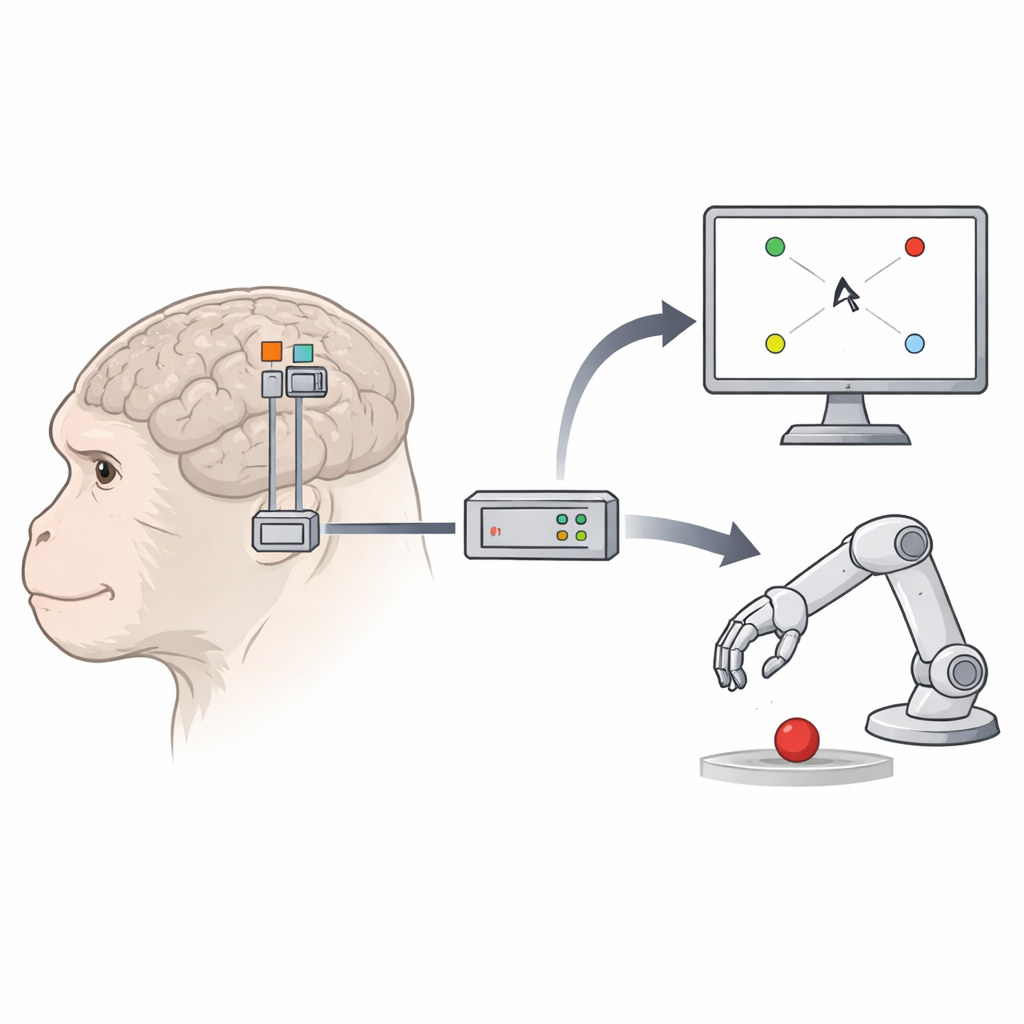
דמיינו שתוכלו להנחות מצביע מחשב או זרוע רובוטית באמצעות מחשבות בלבד, גם אם השרירים שלכם כבר אינם פועלים. ממשקי מוח–מכונה (BMI) שואפים להגשים זאת על־ידי תרגום פעילות מוחית לפקודות המיועדות למכשירים חיצוניים. רוב המערכות עד כה שאבו אותות מאזור־מפתח יחיד בתנועה המוטורית של המוח, אבל מה יקרה אם אזור זה פגוע, כפי שקורה בשבץ או ב‑ALS? במחקר זה נשאל האם אזור שכונתי אחר, בדרך‑כלל מקושר לתכנון פעולות יד ולצפייה בתנועות של אחרים, יכול גם להניע באופן אמין ממשק מוח–מכונה.
אזור מוחי חדש מצטרף לצוות
ממשקי BMI קלאסיים קוראים בעיקר אותות מקורטקס המוטורי הראשי, רצועת רקמת המוח השולטת ישירות בתנועות רצוניות, ומאזור תכנון שכונתי שנקרא הפרה‑מוטור דורסלי. החוקרים פנו לשכן אחר: הפרה‑מוטור הוונטראלי, ובאופן ספציפי אזור הנקרא F5c. במקאקים, F5c עשיר בתאים שמתפרצים בפעילות כאשר בעל החיים מושיט לוחץ ואוחז חפצים ואף כאשר הוא פשוט צופה בפעולות על מסך. התערובת הזו של תגובות לתנועה ולצפייה רמזה ש‑F5c עשוי להתאים לשליטה במצביע או ב"אווטאר" רובוטי מבלי שהגוף יצטרך לזוז.
מקאקים, מיקרואלקטרודות ומטרות נעות
שני מקאקים הושתלו בהם רשתות זעירות של 96 אלקטרודות בשלושה מקומות: בקורטקס המוטורי הראשי, בפרה‑מוטור דורסלי וב‑F5c. במפגשים יומיים ביצעו בעלי החיים משימות ויזואליות פשוטות אך תובעניות מבחינה התנהגותית. באחת מהן נגעו למרכז המסך ואז הגיעו לאחת משמונה מטרות חיצוניות, בעוד ריבוע קטן על המסך זז מהמרכז לאותה המטרה. במשימה שנייה הם שמרו על ידם במקום וצפו פשוט במעבר המצביע אל המטרות. בתרחיש שלישי, מציאותי יותר, הוחלף המצביע בידי אווטאר של זרוע רובוטית תלת־ממדית המגיעה לעבר מטרות בסצנה וירטואלית. לאורך המשימות יכל הצוות להשוות באיזו מידה כל אזור מוחי הניע את תנועת המצביע או האווטאר.
כיצד אותות מוח הפכו לתנועה חלקה
במהלך שלב האימון המצביע או האווטאר נעו לפי מסלולים מעוקלים בעדינות שנוצרו על‑ידי המחשב בזמן שהמקאקים או זזו או צפו. במקביל תיעדו האלקטרודות פרצי פעילות עצבית מהירים. החוקרים אימנו לאחר‑מכן מפענח — כלי מתמטי שלומד למפות דפוסי יריית תאים למהירויות של המצביע או האווטאר על המסך. כדי ללכוד רק את הערוצים המודיעים ביותר בחרו באלקטרודות שפעילותן עקבה אחר כיוון ומהירות התנועה. השתמשו בשיטה שמבודדת דפוסים עצביים הקשורים ביותר להתנהגות והעשירו אותה בצעד לא‑קווי, שאיפשר למערכת ללכוד יחסים מורכבים יותר בין פעילות עצבית ותנועה. בשלב הפענוח הפסיק המחשב להניע את המצביע או האווטאר; במקום זאת השתמש המפענח באותות מוח חיים, שמתעדכנים כל 50 מילישניות, כדי לנווט את התנועה על המסך. המפענח הוכשר שוב באופן תקופתי ב־background כדי שיוכל להסתגל כאשר תגובות עצביות השתנו עם הזמן.

כמה טוב עבד האזור "החדש"?
השאלה המרכזית הייתה האם F5c יכול להשוות או להתקרב ביצועית לאזורים המסורתיים. בשני המקאקים, פענוח המבוסס על F5c בתחילה נותר מאחורי השאר כשנע הזז המצביע, במיוחד כאשר בעלי החיים רק צפו ולא הזיזו את ידיהם. אך ככל שהמפגשים התקיימו — וכאשר יותר אלקטרודות סיפקו אותות מהימנים הקשורים לתנועה — F5c הספיק להתקרב. בכמה תנאים ביצועו השווה לזה של הקורטקס המוטורי הראשי ואפילו עלה עליו במפגשים מאוחרים יותר בשליטה פסיבית על המצביע. בעת שליטה באווטאר הרובוטי, ההצלחה הכוללת הייתה נמוכה יותר בכל האזורים, אך F5c עדיין איפשר שליטה משמעותית, במיוחד כאשר שילבו אלגוריתם מסייע עדין שהכווין בעדינות את האווטאר לעבר המטרה. חשוב לציין כי נוירונים בכל שלושת האזורים הראו דפוסים דומים של כוונון כיווני ופעילות אוכלוסייתית במהלך שלב האימון המונע על־ידי המחשב ושלב השליטה הפעילה, ורק תת‑קבוצה שינתה את הכיוונים המועדפים שלה ככל שהמקאקים למדו להניע את ה‑BMI.
מה משמעות זה עבור נו־טכנולוגיה עתידית
לא־מומחה, הממצא החשוב הוא שאזור הפרה‑מוטור הוונטראלי F5c — שהיה נחשב בעבר בעיקר כמוקד תכנון וצפייה בפעולות — יכול גם לשמש כצומת בקרה מעשית עבור ממשקי מוח–מכונה. כאשר זמינים מספיק אותות הקשורים לתנועה, מפענחים שאומנו על פעילות F5c יכולים להנחות מצביע מסך או רובוט מסייע כמעט באותה מידה כמו מפענחים המבוססים על אזור התנועה הקלאסי. זה מצביע על כך שממשקי BMI קליניים עתידיים לא יצטרכו להישען על אזור קורטיקלי יחיד. עבור אנשים שבהם הקורטקס המוטורי הראשי נפגע, אזורי תכנון שכנים כמו הפרה‑מוטור הוונטראלי עשויים להציע מסלול חלופי לשיקום שליטה בכלים דיגיטליים, במכשירים פרוטטיים או בעזרים לניידות.
ציטוט: De Schrijver, S., Garcia Ramirez, J., Iregui, S. et al. An intracortical brain-machine interface based on macaque ventral premotor activity. Sci Rep 16, 8407 (2026). https://doi.org/10.1038/s41598-026-38536-1
מילות מפתח: ממשק מוח‑מכונה, קורטקס מוטורי, קורטקס פרה‑מוטורי, פענוח עצבי, בקרת פרוטזה