Clear Sky Science · he
מערכת פאזית מסוג-3 מבוססת מבנה וירטואלי לאיתור, פיצוי ובקרה על תקלות חיישנים ומבצעים במערכות לא־לינאריות
שמירה על פעילות המנועים כשחלקים מתקלקלים
הטכנולוגיות המודרניות — ממנופי רובוט במפעלים ועד מתקנים כימיים שמווסתים חומציות — תלויות בחיישנים ובמבצעים שמחזיקים את המערכת בפעולה. אך כאשר רכיבים אלה נדרים, נתקעים או מתקלקלים, המערכת עלולה להפוך לבלתי בטוחה זמן רב לפני שמישהו מבחין בכך. מאמר זה מציג דרך חדשה לאפשר למכונות לזהות ולתקן בעיות כאלה בעצמן, גם כאשר למהנדסים אין מודל מתמטי מדויק של ההתנהגות הפנימית של המערכת.
מדוע בעיות נסתרות כל כך קשות לגילוי
בהקשרים רבים בעולם האמיתי, התנהגות המערכת היא מאוד לא־לינארית: שינויים קטנים בקלט עלולים לגרום לשינויים גדולים ובלתי צפויים ביציאה. שיטות בקרה מסורתיות מניחות שהמעצבים מכירים את המשוואות המנחות את ההתנהגות ושהחיישנים והמבצעים פועלים כמצופה. למעשה, רכיבים מתבלים, הופכים לרועשים או מוחלפים בחומרה מעט שונה. בקרים חסיני־תקלות קונבנציונליים או שמטמיעים מרווחי בטיחות קבועים (שיטות פסיביות) או נסמכים על מודלים מדויקים כדי לזהות ולהתאים לתקלות (שיטות אקטיביות). שתי הגישות מתקשות כאשר המערכת משתנה עם הזמן או כאשר מבנה הפנימי שלה אינו ידוע במלואו. המחברים טוענים שהתעשייה זקוקה לבקרים שלומדים מנתוני אמת, מזהים מתי חיישנים או מבצעים מתנהגים באופן שגוי ומתקנים תקלות אלה בזמן אמת ללא הצורך בתוכנית מפורטת של המערכת.
בקר לומד שטורף את המערכת כקופסה שחורה
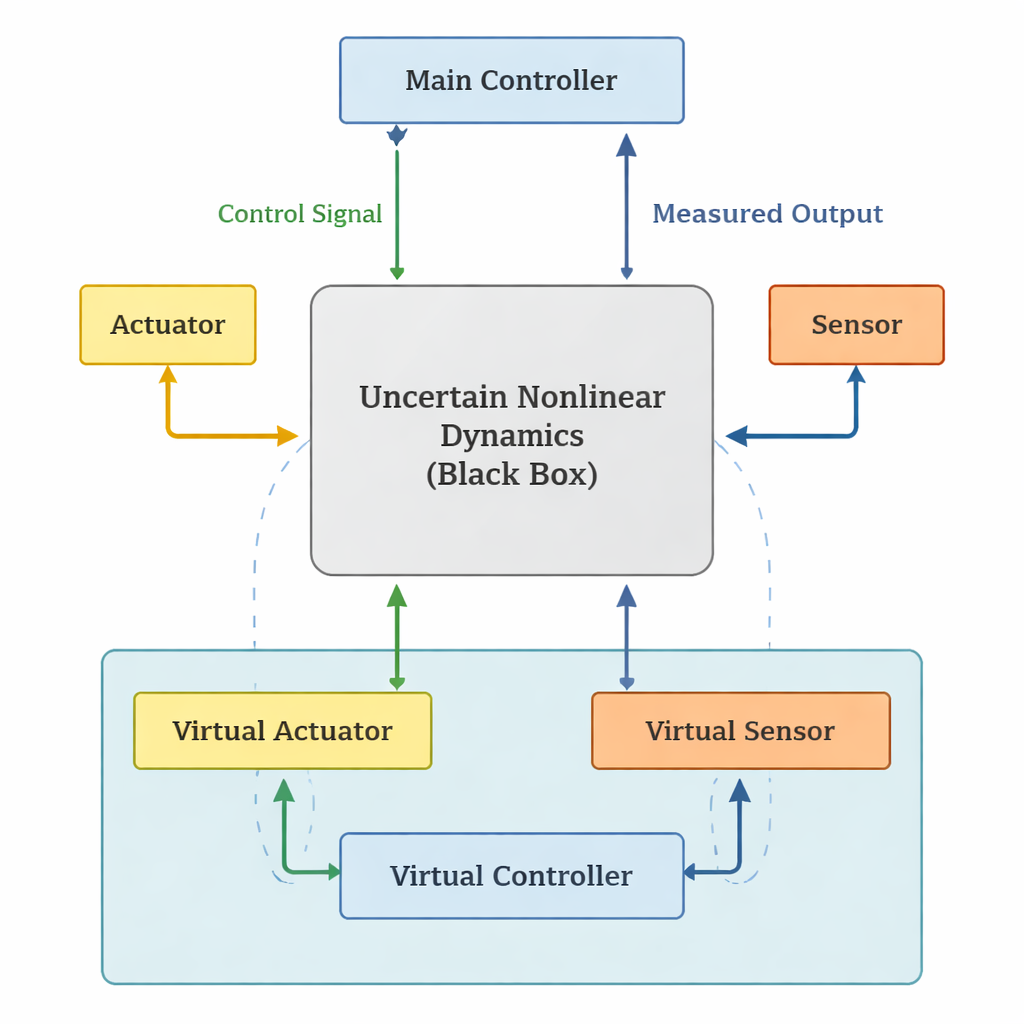
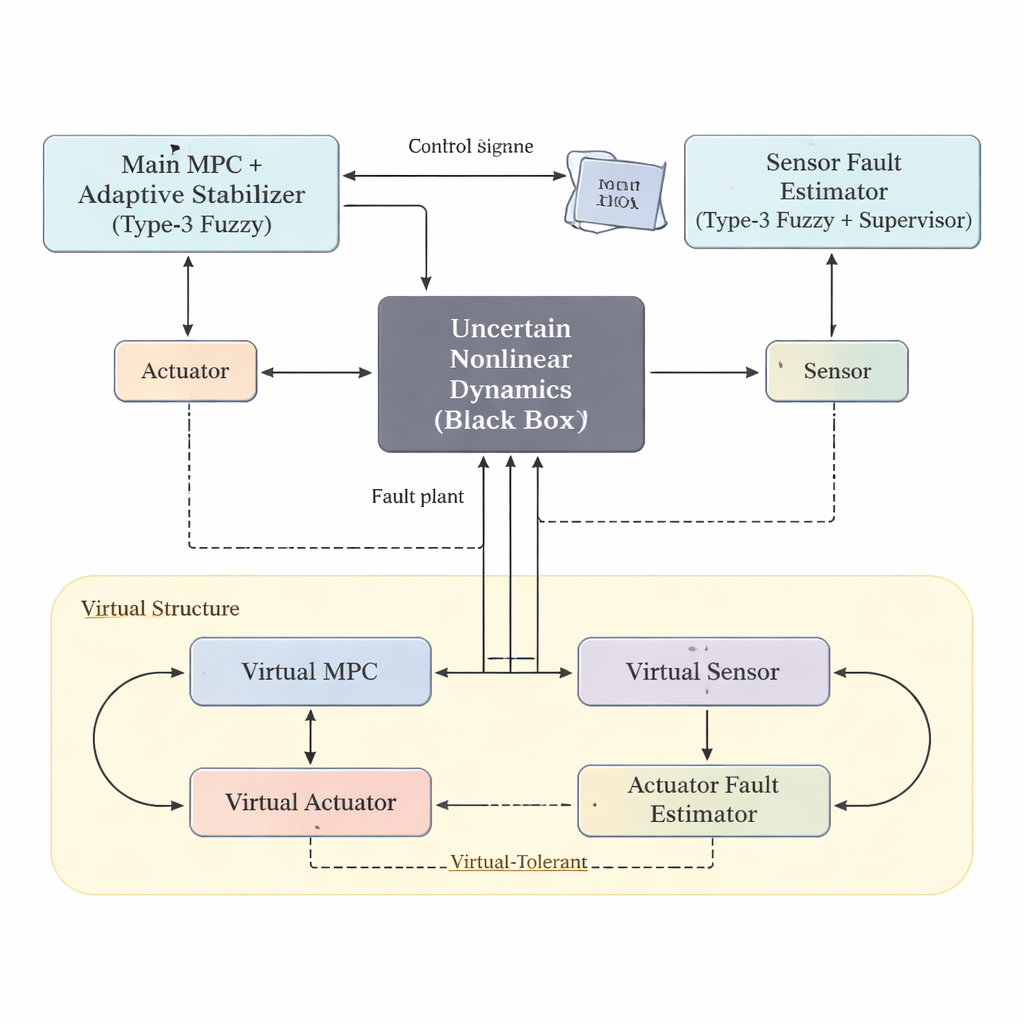
המסגרת המוצעת מתייחסת לצמח (המערכת) כקופסה שחורה: היא רואה רק את אותות הבקרה שנשלחים ואת התוצאות הנמדדות על ידי החיישנים. בלב המערכת נמצא מודל לוגיקה פאזית מסוג-3, צורה מתקדמת של מידול פאזי שנועדה להתמודד עם אי־ודאיות חזקה ורעשי מדידה. מערכת פאזית זו לומדת תיאור קומפקטי של יחס קלט–פלט של הדינמיקה הלא־ידועה באופן מקוון, בעוד שבקר חיזוי מודלי (MPC) משתמש במודל הנלמד כדי לתכנן מהלכי בקרה עתידיים על פני אופק קצר. יחידת ייצוב אדפטיבית פועלת במקביל, ומבטיחה שגם אם המודל אינו מושלם או פרמטרים מסטים, המשוב המשולב משמורש את שגיאות המעקב בתחומים מגבילים ומוביל אותן בסופו של דבר לאפס.
צופים בצופים: זיהוי תקלות בחיישנים ובמבצעים
המסגרת מחלקת את הטיפול בתקלות לשני חלקים מתואמים. ראשית, יחידת תקלה בחיישן עושה שימוש בשני מאמדי פאזי מסוג-3 נוספים בתוספת בלוק מפקח כדי להסיק עד כמה קריאת החיישן סטתה מהערך היציב הצפוי שלה. מכך היא מייצרת אות תיקון שמיישר למעשה את המדידה התקולה כך שהבקר הראשי ממשיך לראות יציאה מהימנה. שנית, השיטה בונה מבנה וירטואלי שמשקף את המערכת האמיתית: הוא כולל חיישן וירטואלי, מבצע וירטואלי, מזהה פאזי משלו ו‑MPC וירטואלי. מפני שהלולאה הוירטואלית אינה סובלת מהדרדרות של המבצע האמיתי, ההבדלים בין מסלולי הבקרה הוירטואליים והאמיתיים חושפים עד כמה המבצע האמיתי נכשל. נוסחה פשוטה ממירה את הפער הזה לרמת תקלה מוערכת, שמפצה אחר כך באות הבקרה הראשי.
הוכחת יציבות ובדיקות על רובוטים ומכלים כימיים
כדי להראות שהגישה היא לא רק אינטואיטיבית אלא גם מבוססת מתמטית, המחברים בונים פונקציית ליאפונוב — מעין מדד אנרגיה — שכוללת את שגיאות המעקב, שגיאות המידול והפרמטרים הפאזיים שניתנים לכוונון. הם גוזרים חוקים לעדכון המונחים האדפטיביים כך שאותה אנרגיה תמיד פוחתת, מה שמדגים ששגיאות מצטמצמות עם הזמן גם בנוכחות הפרעות ותקלות. סימולציות בודקות את השיטה על שני דוגמאות שונות מאוד: זרוע רובוטית חד‑קישורית ותהליך נטרול pH במכל כימי. בשני המקרים הדינמיקה האמיתית מטופלת כלא ידועה לחלוטין, הפרמטרים משתנים, ותקלות בחיישנים ובמבצעים מוזרקות במהלך הפעולה. הבקר שומר על מעקב מדויק, לומד במהירות את גודל התקלות ושומר על מדדי סיכון ושגיאה נמוכים, ומציג ביצועים טובים יותר מבקרים פאזיים פשוטים ומסכמות מתקדמות אחרות מהספרות.
מה המשמעות של זה למערכות אמיתיות
לקורא שאינו מומחה, המסר המרכזי הוא שהשיטה מעניקה למערכות מורכבות מעין מודעות עצמית מובנית. במקום להסתמך על מודל מושלם או על כוונון ידני על־ידי מהנדסים, הבקר לומד ברציפות מן הנתונים שהוא רואה, מבחין מתי חיישנים או מבצעים מתחילים לשקר או להיחלש, ומתאים אוטומטית את פעולותיו כדי לשמור על ביצועים יציבים. מאחר שהוא זקוק רק לנתוני קלט ויציאה, ניתן, עקרונית, ליישם אותו על מכונות רבות שונות בלי לעצב מחדש את הכל מהתחלה. בעוד שהתוצאות מבוססות על סימולציות ועדיין יש צורך לבחון סוגיות חומרה, העבודה מצביעה על כיוונים לרובוטים תיישבותיים, תהליכים תעשייתיים ומערכות אוטונומיות עמידות יותר שישמרו אמינות גם כאשר הרכיבים והסביבות אינן אידיאליות.
ציטוט: Hong, X., Zhakiyev, N., Yedilkhan, D. et al. A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems. Sci Rep 16, 7153 (2026). https://doi.org/10.1038/s41598-026-38456-0
מילות מפתח: בקרת חסינות לתקלות, לוגיקה פאזית, בקרת חיזוי מודלית, תקלות בחיישנים ובפעילים, מערכות לא־לינאריות