Clear Sky Science · he
רשת YOLOv11 משופרת לזיהוי פסולת ימית בסביבה תת-ימית
למה חשוב לזהות אשפה תת-ימית
הרחק מתחת לפני הים נאספים באיטיות שקיות פלסטיק, בקבוקים, חוטי דיג ופסולת אחרת. הזוהמה הזו פוגעת בחיי הים, חוסמת בתי גידול רגישים ואף יכולה להפריע לרובוטים תת-ימיים שמשתמשים בהם מדענים כדי לחקור ולהגן על הים. המאמר המתואר כאן מציג מערכת ראייה ממוחשבת חכמה יותר שעוזרת למצלמות ולרובוטים למצוא ולתייג אוטומטית פסולת תת-ימית בזמן אמת, אפילו במים עכורים ומלאי הפרעות.
האתגר של ראייה ברורה מתחת למים
בניגוד לתמונות יומיומיות ברורות על היבשה, תמונות תת-ימיות הן לעתים קרובות חשוכות, מטושטשות ובגוון כחול או ירוק. האור דועך במהירות עם העומק, חול ופיטופלנקטון מעכירים את המים, והפריטים הפסולתיים לעתים קטנים, מוסתרים חלקית או נראים דומים לסלעים וצמחים. שיטות עיבוד תמונה מסורתיות מתקשות בתנאים אלה, ואף גלאי למידה עמוקה מודרניים עלולים לפספס עצמים זעירים או לטעות בין מרקם רקע לפסולת. עם זאת, דיוק ומהירות בזיהוי הם קריטיים למיפוי זיהום, להכוונת רובוטי ניקוי ולעקיבה אחרי שינויים בכמות הפסולת הימית לאורך זמן.
בניית על עוגן ראייה מהיר
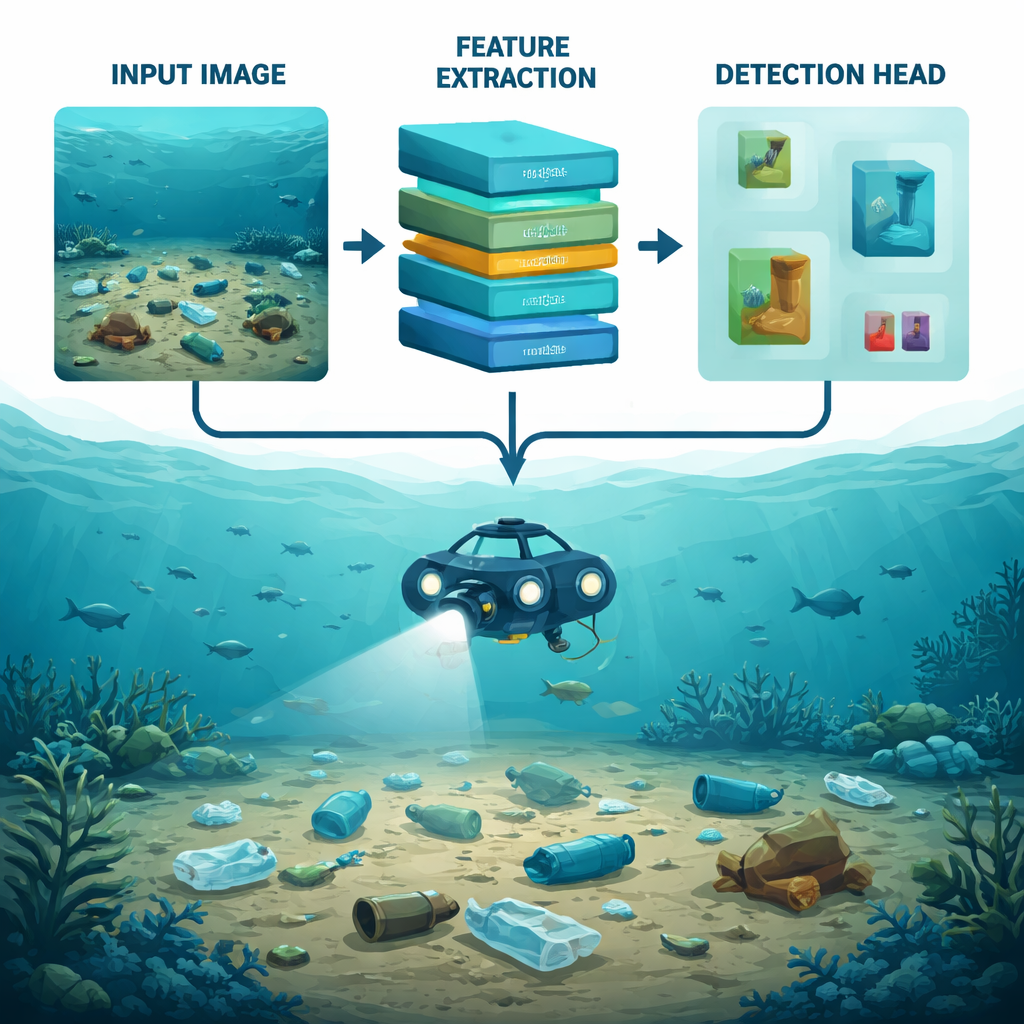
המחברים בונים על YOLOv11, חבר עדכני במשפחת הגלאים "You Only Look Once". דגמי YOLO פופולריים מכיוון שהם סורקים תמונה פעם אחת ומנבאים מיקומים וסוגים של עצמים רבים בזמן אמת. עם זאת, תכנון ה-YOLOv11 הסטנדרטי נוצר לסצנות טיפוסיות יותר, כמו רחובות או תמונות פנימיות, ולא לעולם התת-ימי החזותי הקשה. כדי לצמצם את הפער הזה, החוקרים מחדש שני חלקים מרכזיים ברשת: כיצד היא שולפת תחילה דפוסי ויזואליים מהתמונה, וכיצד היא מאוחר יותר מחליטה אילו חלקים הם עצמים פסולת חשובים ואילו הם רק רקע רעשי.
דרך חדשה להבחין בפרטים ברב-קנה מידה
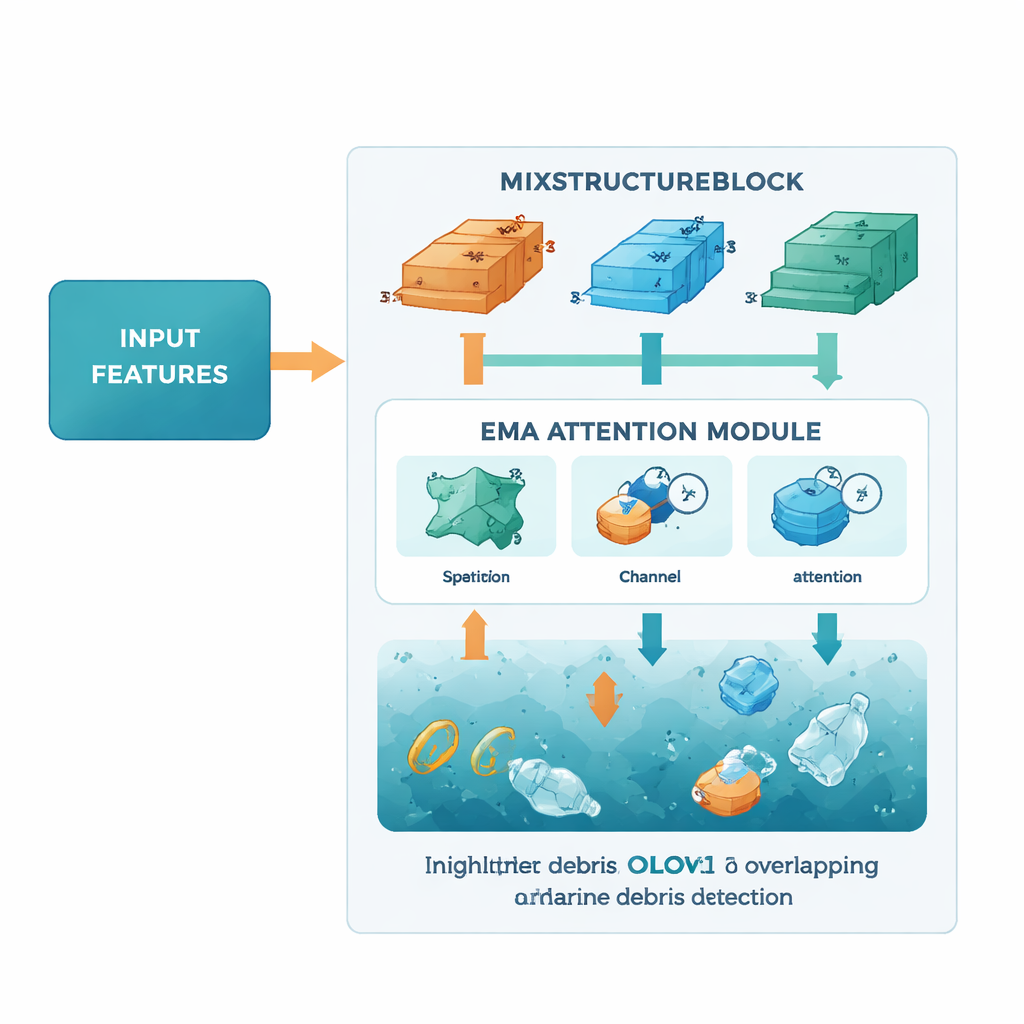
שיפור ראשון הוא מודול הנקרא MixStructureBlock, שמחליף בלוק בנייה סטנדרטי בגב הרשת של YOLOv11. במקום להשתמש בדפוס קבוע אחד של מסננים, MixStructureBlock מריץ מספר סניפים במקביל המתבוננים בסצנה ב"גודל חלון" וריווח שונים. זה מסייע לרשת להבחין גם בפרטים עדינים, כמו קצה פקק בקבוק, וגם בצורות גדולות יותר, כמו שקית צפה. בנוסף, הבלוק כולל מנגנוני תשומת לב פשוטים שלומדים להדגיש צבעים ומיקומים מידעיים תוך דיכוי ריבוי טלאי רקע לא מועיל. התוצאה היא סט תכונות עשיר ונקי יותר שמקל על זיהוי חלקים קטנים וחיוורים של פסולת.
ללמד את הרשת היכן להתמקד
השדרוג השני הוא מודול Efficient Multi-scale Attention (EMA), שנוסף בשלב מאוחר יותר ברשת שבו מתבצעים הזיהויים. EMA מסתכל על מפת התכונות הן במרחב והן בערוצים, ושואל למעשה שתי שאלות בו־זמנית: "איפה בתמונה מתרחש משהו חשוב?" ו"אילו סוגי דפוסים רלוונטיים כרגע?" על ידי ריכוז מידע בקני מידה מרובים ושימוש באופרטורים מתמטיים קלים משקל, EMA מחדד את המיקוד של הרשת לאזורי פסולת צפויים — כגון עצמים חופפים או פריטים עמומים מרחקים מהמצלמה — תוך שמירה על מודל קומפקטי ומהיר מספיק לשימוש בזמן אמת על חומרה משובצת.
בדיקת המערכת במבחן
כדי לשפוט את העיצוב שלהם, הצוות אימן והעריך את המודל על TrashCan, מאגר גדול של תמונות תת-ימיות שפורסם ביפן. גרסה אחת של המערך מתייגת פסולת לפי סוג עצם ספציפי (למשל כוס, שקית או צינור מתכת), בעוד שגרסה אחרת מקבצת פריטים לפי חומר (כמו פלסטיק או בד). בשתי הגרסאות, הרשת המשופרת גוברת על מספר בסיסים חזקים, כולל ה-YOLOv11 המקורי, מערכות פסולת ימיות קודמות וגרסאות YOLO ממוקדות תת-ימיות אחרות. היא לא רק מזהה יותר פסולת נכונה, במיוחד פריטים קטנים וצפופים, אלא עושה זאת עם גודל מודל מרשים של כ-5 מגהבייט, שמתאים היטב לכלי רכב תת-ימיים בעלי הגבלת צריכת כוח.
מה זה אומר למען אוקיינוסים נקיים יותר
במילים פשוטות, המחקר מראה שתכנון מחושב מחדש של האופן שבו בינה מלאכותית "מביטה" בתמונות תת-ימיות יכול לעשות הבדל ממשי בזיהוי פסולת מתחת לגלים. על ידי שילוב של חילוץ דפוסים במרבב-קני מידה ותשומת לב חכמה לאזורים חשובים, המערכת המוצעת מזהה יותר פסולת תוך שמירה על יעילות שמאפשרת שימוש בזמן אמת. פריסת הטכנולוגיה על מערכות מצלמה ורובוטים תת-ימיים יכולה לעזור למדענים ולסוכנויות סביבתיות למפות מוקדי זיהום, להנחות מאמצי ניקוי ולעקוב האם מדיניות להפחתת פסולת ימית אכן עובדת — צעד נוסף לקראת אוקיינוסים בריאים יותר.
ציטוט: Yuanwei, J., Yijiang, D., Xuemei, W. et al. An improved YOLOv11 network for marine debris detection in underwater environment. Sci Rep 16, 7074 (2026). https://doi.org/10.1038/s41598-026-38305-0
מילות מפתח: זיהוי פסולת ימית, רובוטיקה תת-ימית, זיהוי עצמים, למידה עמוקה, זיהום אוקיינוס