Clear Sky Science · he
מחקר על שיטת מיקום במיון חבילות בלוגיסטיקה מבולגנת
מדוע מיון חבילות חכם יותר חשוב
כל הזמנה מקוונת שמבצעים יוצרת בלט חסוי של קופסאות במרכזי לוגיסטיקה ענקיים. לפני שהחבילה יכולה להיאץ לכיוון פתח הדלת שלכם, חייבים לאתר אותה, להרים אותה, למדוד אותה, לסרוק אותה ולנתב אותה — לעתים קרובות מתוך ערימה כאוטית של חבילות מעורבות. כיום, חלק גדול מהשלב הראשון של "פיענוח הכאוס" עדיין נשען על עובדים אנושיים המבצעים משימות חזרתיות ומעייפות. מאמר זה מציג שיטה חדשה מבוססת ראייה שעוזרת לרובוטים למצוא בצורה אמינה היכן לתפוס כל חבילה בערימה, צעד אחד לקראת מיון חבילות מהיר יותר, אוטומטי ופחות תובעני מבחינת עבודת יד.
מערמות מבולגנות לנתונים ידידותיים לרובוט
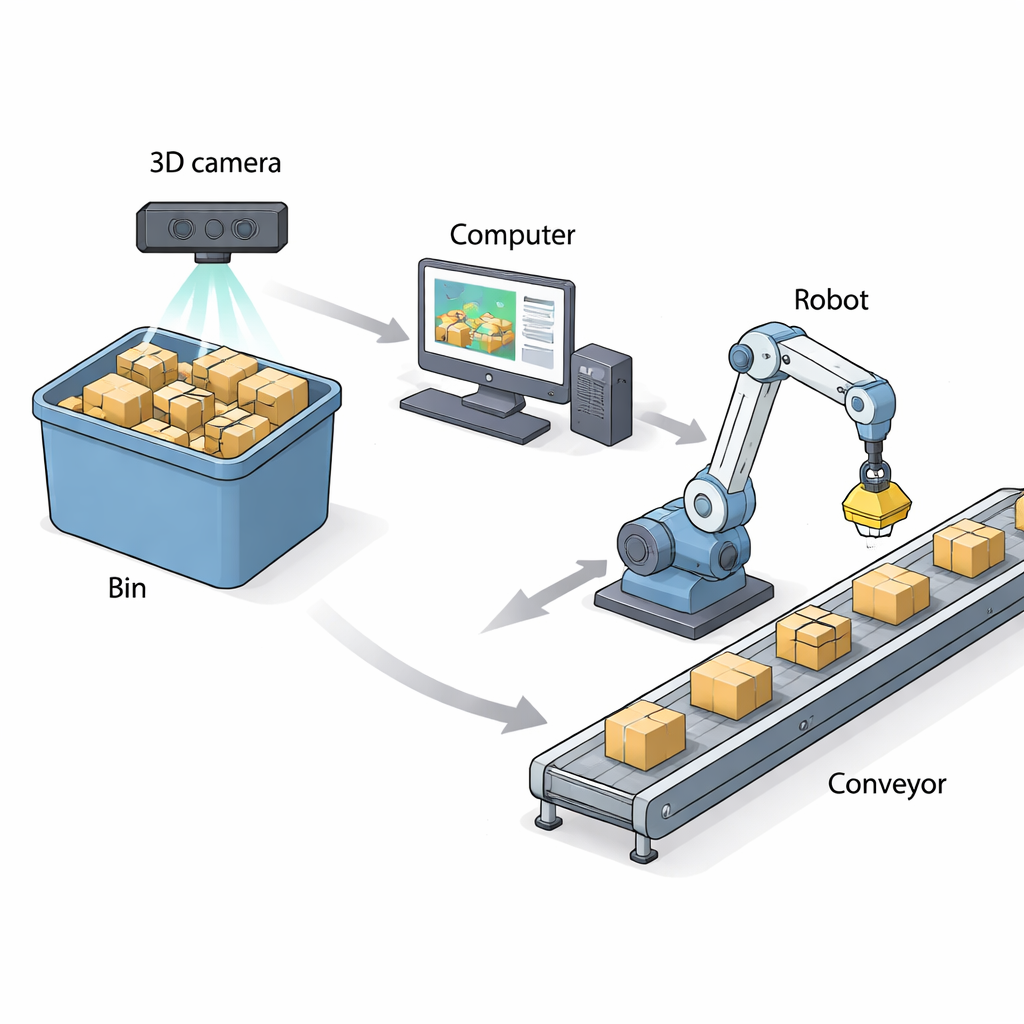
החוקרים מתמקדים במה שהם קוראים חבילות לוגיסטיות "מבולגנות": קופסאות יומיומיות ושקיות רכות המושלכות למיכלים ללא סדר מיוחד, שלעיתים נמעכות או מתעקמות מהצמדה בערימות. כדי להחליף עובדים אנושיים בסביבה מבולגנת זו, על הרובוט לדעת תחילה בדיוק היכן להגיע וכיצד לכוון את האחיזתו על פני שטח החבילה הנבחרת. הצוות בונה מערכת סביב מצלמת 3D שתופסת גם תמונת צבע וגם מפת עומק של השכבה העליונה של החבילות. רשת זיהוי מודרנית (מבוססת YOLOv8) מאתרת חבילות בודדות בתמונת הצבע, בעוד שמפת העומק חושפת את צורתן התלת־ממדית. שילוב זה מאפשר למחשב לבחור את החבילה הטובה ביותר לתפיסה הבאה — כזו שאינה מכוסה יתר על המידה ומרוחקת מספיק מקצוות המיכל — לפני חישוב נקודת אחיזה מדויקת.
מציאת נקודת אחיזה יציבה בשלוש נקודות וצל
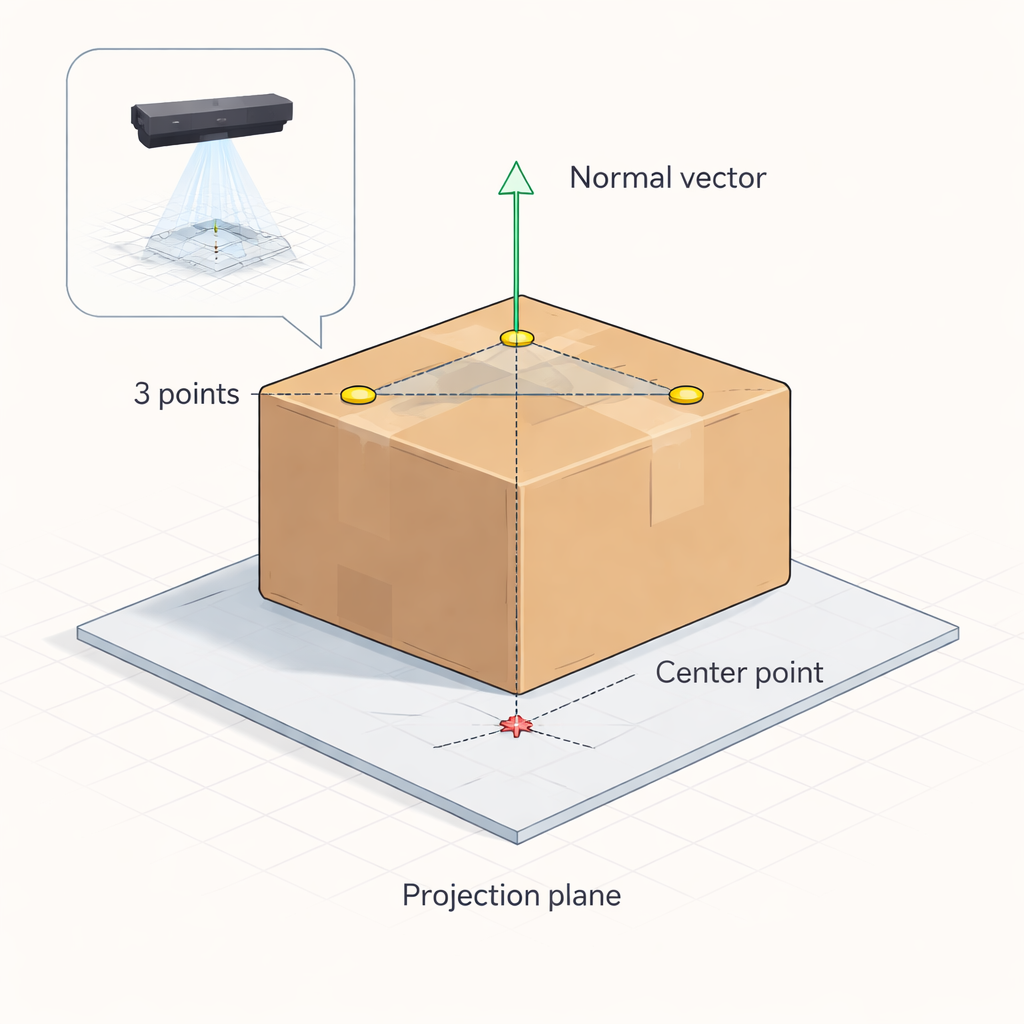
בלב השיטה יש טריק גאומטרי שהמחברים מכנים אלגוריתם מיתאר–הטייה במרכז באמצעות שלוש נקודות. ברגע שנבחרה חבילה יעד, המערכת בוחרת אקראית שלוש נקודות על פני השטח העליון שלה מתוך נתוני העומק. שלוש נקודות אלה מגדירות מישור, בדיוק כמו שלוש סיכות על משטח שולחן מגדירות את הנטייה של אותו שולחן. מתוך מישור זה, האלגוריתם מחשב כיוון "נורמלי" — קו ישר היוצא בניצב לפני השטח של החבילה. במקביל, המערכת משתמשת בארבע הפינות העליונות של החבילה בתמונה כדי להסיק את המרכז הגיאומטרי של המיזוג המוקרן שלה, בדומה למציאת מרכז צל של מלבן. שילוב כיוון המישור עם מיקום המרכז הזה מניב מיקום אחיזה תלת‑ממדי מדויק ושיפוע פני השטח העליונים של החבילה, שיכולים להנחות גביע יניקה או מצבה של מהדק הרובוט.
התמודדות עם חבילות מעוכות ונפוחות
חבילות אמיתיות אינן קוביות מושלמות: מעטפות עטופות בבלונים נוטות לצנוח, שקיות רכות מתנפחות, וקופסאות קרטון עלולות לעוות תחת עומס. הנחה פשוטה של משטח שטוח תכשל במקרים אלה. כדי לטפל בכך, המחברים מרחיבים את המתמטיקה שלהם כדי להבחין בין שלוש מצבים: חבילות כמעט שטוחות, עליונות קעורות (נפוחות) ועליוניות קמורות (שוקעות). על ידי השוואת ערכי העומק הגבוהים והנמוכים ביותר על פני השטח של החבילה, המערכת קובעת תחילה האם יש עיוות משמעותי. אם כן, היא מנתחת כיצד משטח העיוות חותך מישור ייחוס מדומה ומתאימה אליפסה מקורבת לחתך זה. מתוך כך היא פותרת עבור מישור "אופטימלי" המייצג בצורה הטובה ביותר משטח אחיזה יציב — גם אם החלק העליון האמיתי שוקע או מתנפח — ואז מקרינה את נקודת האחיזה המרכזית בחזרה על מישור זה.
בדיקת האלגוריתם במבחן
כדי לבדוק האם המתמטיקה עובדת בפועל, הצוות בנה ערכת ניסוי עם רובוט תעשייתי בעל שישה צירים, מצלמת 3D ומכשיר לייזר‑וחוד מותאם אישית. ראשית, הם סימנו את המרכז הגיאומטרי האמיתי של פני השטח העליונים של כל חבילה ניסיונית והשתמשו בשני קרני לייזר כדי לאתר את המיקום הפיזי הזה במרחב. לאחר מכן הם נתנו לאלגוריתם הראייה שלהם לחשב את האומדן שלו לאותו מרכז וציווה על הרובוט להזיז חוד שני לנקודה המחושבת. על ידי מדידת ההיסט הקטן בין שתי קצות המחטים, יכלו לחשב את שגיאת המיקום. ניסויים גם עם דגמים קשיחים מעץ וגם עם חומרים מציאותיים—קופסאות גליל רוח, מעטפות בועתיות ושקיות פלסטיק, בגדלים עד 250×250 מ"מ—הראו שגיאת מיקום מקסימלית של כ‑1.7 מילימטר ושגיאות ממוצעות קרובות למילימטר אחד לציר. החישוב המלא לכל חבילה ארך בערך 17.5 מילישניות, מהיר דיו לשורות מיון בקצב גבוה.
מה זה אומר למחסנים העתידיים
במילים פשוטות, המחקר מראה שרובוט המצויד במצלמת 3D ואלגוריתם מבוסס שלוש‑נקודות והיטל יכול לזהות באופן אמין היכן וכיצד לתפוס חבילות מתוך מיכל מבולגן ברמת דיוק של מילימטרים. למרות שעיוותים חזקים בחבילות רכות מאוד עדיין מפחיתים מעט את הדיוק, השיטה נשארת חזקה דיים לתנאי מחסן מציאותיים. כשהיקפי החבילות ממשיכים לעלות וחוסרים בכוח אדם מתמשכים, אלגוריתמים כאלה יכולים לאפשר עבודה בטוחה פחות מונוטונית על ידי העברת המשימות הכבדות והחזרתיות ביותר מאנשים למכונות — תוך תרומה להפעלתו החלקה של עולם המסחר האלקטרוני המתפתח.
ציטוט: Han, Y., Zhang, F., He, A. et al. Research on positioning method in parcel sorting in disordered logistics. Sci Rep 16, 7524 (2026). https://doi.org/10.1038/s41598-026-38092-8
מילות מפתח: ראייה תלת‑ממדית, מיון חבילות, איסוף רובוטי, אוטומציה לוגיסטית, לוקליזציה של עצמים