Clear Sky Science · he
רגרסיית תהליך גאוסי עם הגדלת דגימות מדומות מונחות-פיזיקה לחיזוי שחיקה תחת מדידות דלילות בחריטה
למה ניטור חכם של כלים חשוב
מוצרים יומיומיים — ממטוסים והשתלות רפואיות ועד טלפונים חכמים — נשענים על חלקי מתכת שעובדו בדיוק קיצוני. חלקים אלה נחתכים על ידי כלי חיתוך שמשחיקים עם הזמן, בדומה לשחיקה של צמיג רכב. החלפת כלי חיתוך מוקדם מדי מבזבזת כסף וחומר; החלפתו מאוחר מדי עלולה להביא לכישלון בבדיקות איכות או להרס מכונות. במחקר זה מוצג דרך חדשה לניבוי אופן השחיקה של כלים לאורך זמן, בעזרת שילוב של פיזיקה וסטטיסטיקה, כך שיצרנים יוכלו להשתמש בכלים בבטחה למשך הזמן המרבי ללא בדיקות תכופות.
רמזים חבויים בקולות ורעידות המכונה
בחריטת CNC מודרנית, חיישנים מאזינים לתהליך באופן רציף. הם מקליטים כוחות, רעידות זעירות ואפילו גלי קול כאשר כלי החיתוך מוסר חומר. האותות הללו מלאים ברמזים על מצב הכלי, אך מורכבים מדי כדי לפרשם בעין. באופן מסורתי מהנדסים עוצרים מדי פעם את המכונה, מוציאים את הכלי וכורעים למדוד את השחיקה במיקרוסקופ — בדיקה מדויקת אך איטית ויקרה. האתגר הוא ללמוד מיפוי אמין מהאותות החיות של החיישנים אל השחיקה הבלתי נראית, כדי שמפעלים יוכלו למזער הפרעות אלה ועדיין לשמור על בקרת איכות קפדנית.
מגבלות הניטור החכם של היום
גישות רבות בשנים האחרונות משתמשות בלמידת מכונה — שיטות כמו רשתות נוירונים או מכונות וקטור תמיכה — כדי לקשר מאפייני חיישנים לשחיקה. מערכות אלה יכולות לעבוד היטב כאשר מאומנות על מערכי נתונים גדולים ומתויגים בקפידה. עם זאת, איסוף נתונים כזה יקר מפני שכל תיוג דורש עצירה של הייצור כדי למדוד את השחיקה. משפחה אחרת מבטיחה של שיטות, רגרסיית תהליך גאוסי, מצטיינת כאשר הנתונים מוגבלים ויש לה את היתרון הנוסף של הערכת אי־הוודאות שלה עצמה. אף על פי כן גם שיטה זו מתקשה כאשר מתבקשים תחזיות לטווחים רחוקים מעבר למדידות שברשותה: תחזיותיה נוטות לשוב לניחוש ניטרלי ואי־הוודאות מתרחבת, בדיוק כאשר המפעלים זקוקים לתחזיות ארוכות טווח מהימנות.
מילוי הפערים בעזרת דגימות מדומות מונחות פיזיקה
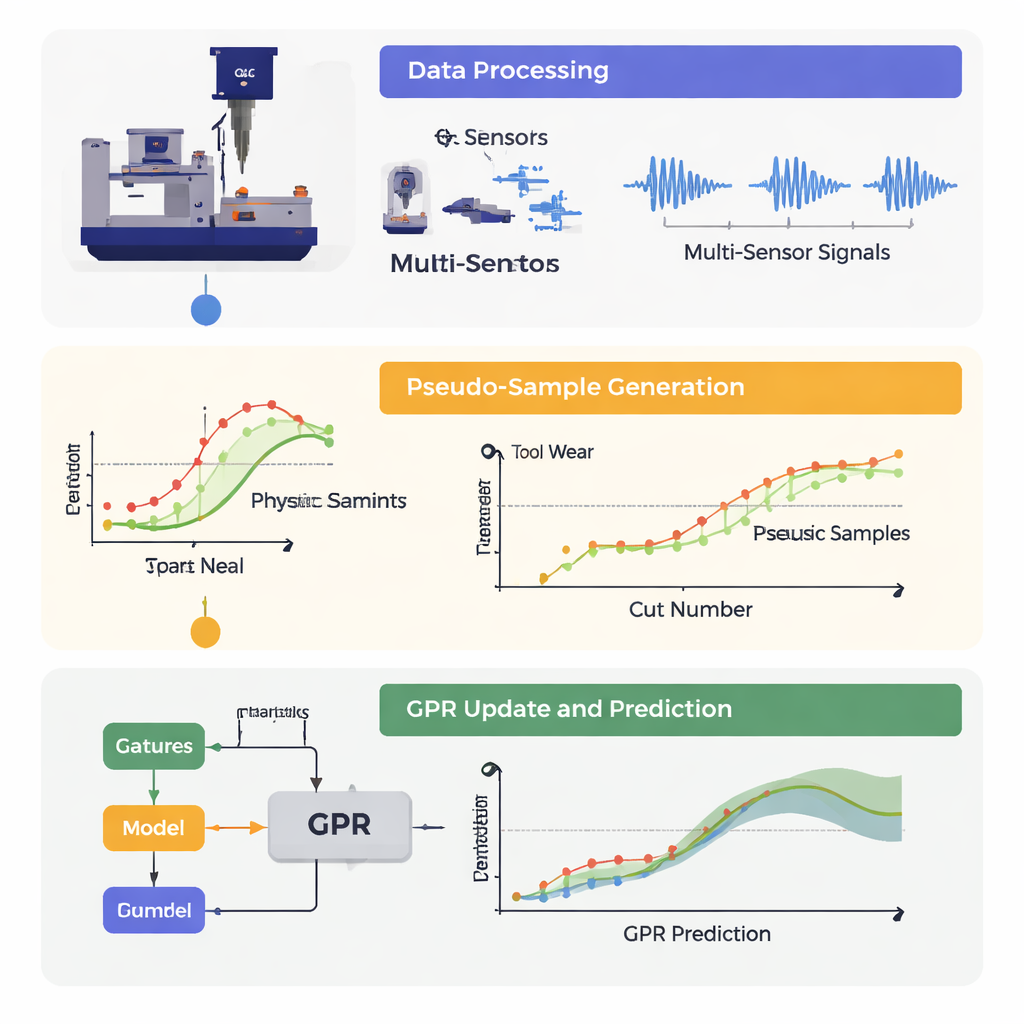
המחברים מציעים מסגרת שהם קוראים לה GPR-PPS, ראשי תיבות של Gaussian process regression with physics-guided pseudo-samples. במקום להסתמך רק על מדידות שחיקה אמיתיות ודלות, השיטה משתמשת במודל פיזיקלי המתאר כיצד שחיקת הכלי מתפתחת טיפוסית לאורך החיים — מתחילת שינוי מהיר, דרך שלב יציב, ועד לשלב קריסה מואץ. לאחר שהמודל מאומן על נתונים צפופים בשלבים המוקדמים, הוא חוזה שחיקה בין שתי נקודות בדיקה. עקום המונחה על־ידי הפיזיקה מתאים אז לניבויים אלה ומותאם בעדינות כך שיעבור בדיוק דרך שתי המדידות האמיתיות. לכל חיתוך באמצע מקצים ערך שחיקה סינתטי, או "מדומה", מהעקומה המותאמת, וכך מעטים של מדידות יקרות הופכים למערך אימון צפוף ותואם פיזיקלית.
לולאת למידה שמתאימה לאורך חיי הכלי
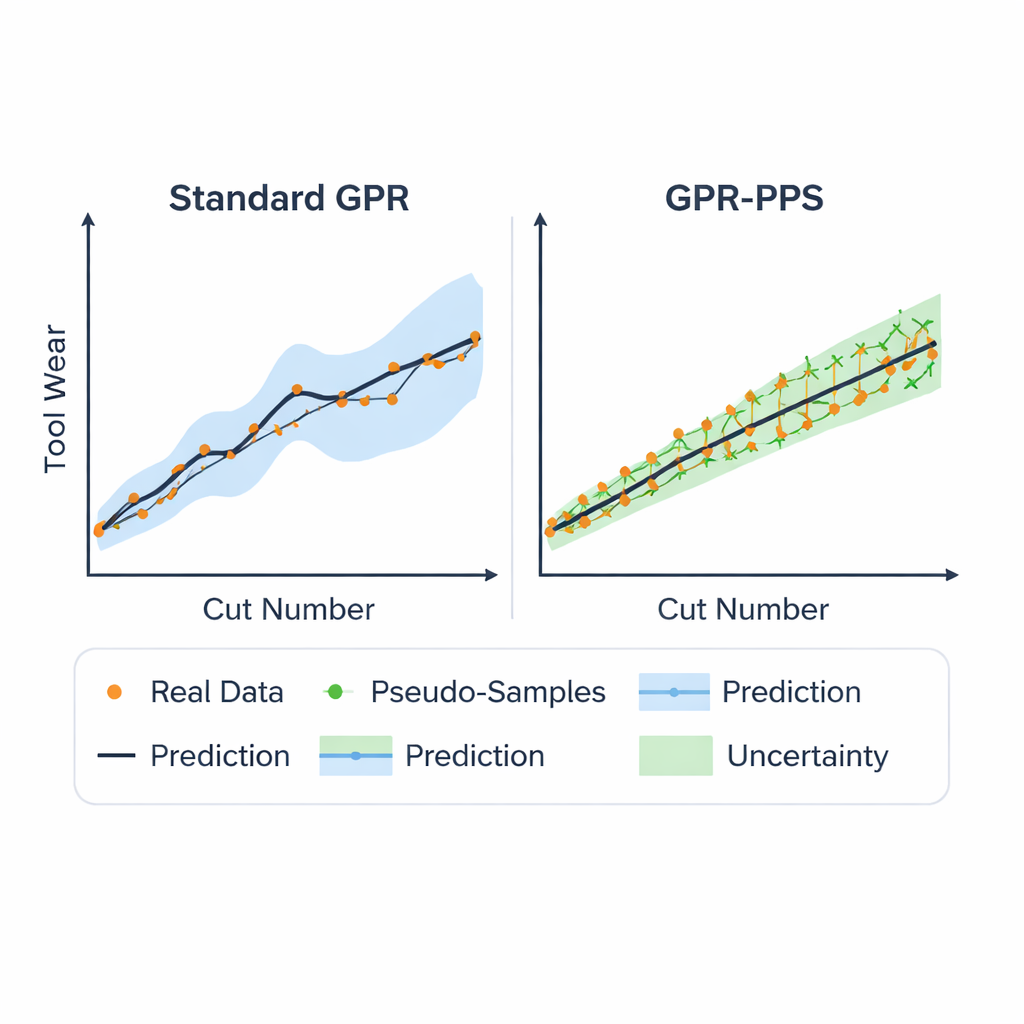
דגימות המדומות משולבות עם המדידות האמיתיות ומוזנות חזרה למודל תהליך גאוסי בלולאה מתמשכת. בכל שלב המערכת מעדכנת את הבנתה לגבי הטרנד של השחיקה והאי־וודאויות שנותרו. החוקרים בדקו אסטרטגיה זו על סט נתונים ציבורי ידוע של חריטה במהירות גבוהה, שבו שבעה חיישנים הקליטו אותות עבור מאות חיתוכים בעוד ששחיקת הכלי נמדדה לעיתים רחוקות בלבד. אפילו כשהמודל קיבל תוויות עבור פחות מ־10% מחיי הכלי, הוא הצליח לחזות את עקומת השחיקה כולה עם שגיאות נמוכות יותר מאשר שיטות למידת מכונה מסורתיות ומאשר תהליכי גאוס בלי דגימות מדומות. הוא גם יצא עם תחומי אמון צרים ומידעיים יותר, מה שנתן למהנדסים תחושת סיכונים ברורה יותר בקבלת ההחלטה האם הכלי יכול להמשיך לפעול בבטחה.
מה משמעות הדבר עבור ייצור בעולם האמיתי
עבור קהל שאינו מומחה, הרעיון המרכזי הוא שהשיטה משתמשת במה שכבר ידוע לנו על אופן שחיקת כלים, יחד עם נתונים מדודים מוגבלים, כדי "למלא את החסר" באופן מובנה ומשמעתי. על ידי הפיכת מספר מועט של מדידות ישירות לעשרות נקודות מדומות העומדות בכללים פיזיקליים, המודל לומד לעקוב אחרי השחיקה בדיוק גבוה יותר לאורך כל חיי הכלי, ובו־זמנית מציין את רמת הבטחון של כל תחזית. למעשה, זה יכול לאפשר למפעלים לבדוק כלים לעתים פחות תכופות, להפחית בזבוז ממחליפים מוקדמים, למנוע כשל פתאומי ולהתקדם לעבר מערכות מכונות אוטונומיות ומנטרות-עצמן.
ציטוט: Nguyen, HP., Nguyen, DT. & Kim, JM. Gaussian process regression with physics-guided pseudo-sample augmentation for wear prediction under sparse measurements in milling. Sci Rep 16, 7231 (2026). https://doi.org/10.1038/s41598-026-38067-9
מילות מפתח: חיזוי שחיקת כלי, חריטת CNC, למידת מכונה מונחית פיזיקה, רגרסיית תהליך גאוסי, תחזוקה חיזויית