Clear Sky Science · he
ניתוח מחדש ואופטימיזציה של מרחב העבודה של רובוט מקבילי תלוי-כבלים מודולרי
רובוטים שנעים על מסילות בלתי נראות
דמיינו רובוט שיכול להחליק מצלמה כבדה ברחבי איצטדיון, להרים חומרי בנייה מעל אתר בנייה, או להנחות מכשיר שיקום סביב מטופל — והכל כשהוא תלוי בכבלים במקום לנוע על זרועות נוקשות. מאמר זה מציג סוג חדש של רובוט תלוי-כבלים שניתן לעצב את מבנהו על פי דרישה, מה שמאפשר למכונה אחת להתאים עצמה למגוון משימות תוך ניצול מרבי של תנועות שימושיות במרחב העבודה שלה.
בניית רובוט מחלקים ניתנים להחלפה
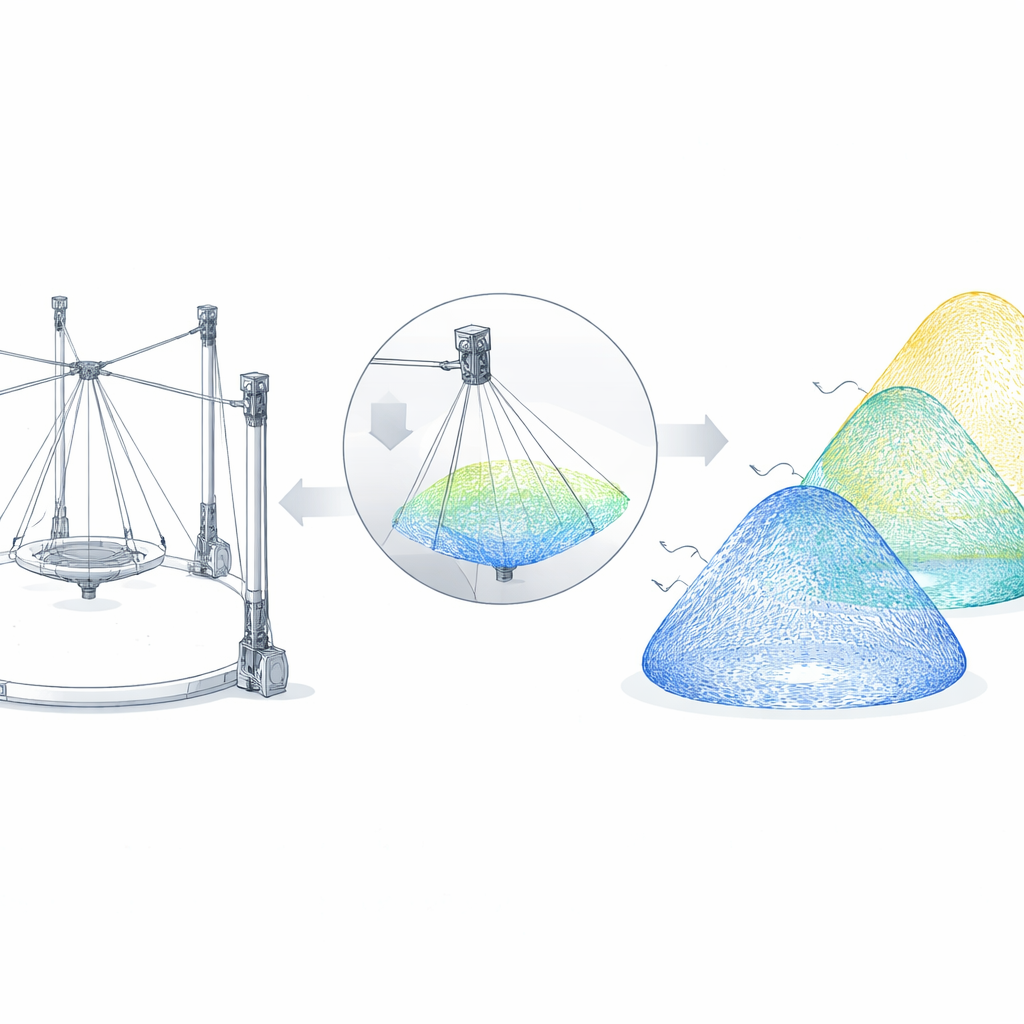
בלב המחקר עומד רובוט מקבילי תלוי-כבלים מודולרי (MCSPR). במקום זרועות מתכת קבועות הוא משתמש בעד שישה "ענפים" זהים, כל אחד מהם מגדל עם מנועים, גלגלים וכבל שמחבר לפלטפורמה נעה מרכזית המכונה קצה-הכלי. הענפים ממוקמים סביב מסלול מעגלי וניתן להוסיף, להסיר, לסובב או להגביה ולהוריד אותם. על ידי סידור מחודש של הענפים, אותו חומרה יכולה להתנהג כמו מספר רובוטים שונים: בשני ענפים היא נעה במישור, בשלושה או בארבעה ענפים היא נעה בחופשיות במרחב, ובחמישה או שישה ענפים היא גם יכולה להטות ולסובב את הפלטפורמה בכיוונים מרובים.

תכנון שלד למכונה שמשנה צורה
עיצוב מערכת כל כך גמישה אינו עניין של חיבור חלקים בלבד. המחברים משתמשים בגישה שיטתית של "סינתזה מבנית", המטפלת בכל כבל, גלגל ומפרק כחלקי בניין בסיסיים ברשת. בעזרת דיאגרמות בדומה לגרפים הם ממפים כיצד אלמנטים אלה מתחברים כדי שהפלטפורמה תזכה בחופשי התנועה הרצויים — כגון החלקה לאורך שלושה צירים או סיבוב סביבם. קטלוג המודולים והחיבורים הזה משמש ככלי עיצוב: בהתאם לתנועה הנדרשת למשימה, המעצב יכול לבחור כמה ענפים להשתמש והיכן למקמם במסלול המעגלי, בידיעה שהמבנה שיתקבל יתנהג כמתוכנן.
לדעת באיזה כיוון תזוז הפלטפורמה
מאחר שהפלטפורמה תלויה בכבלים שיכולים רק למשוך, ולא לדחוף, חיזוי התנועה שלה מורכב יותר מאשר ברובוטים מסורתיים. הצוות מפתח תיאור מתמטי מאוחד שעובד עבור כל חמש תצורות ה-MCSPR העיקריות. נתונה מיקום ותנוחה רצויים של הפלטפורמה, הם מחשבים במדויק מהו אורך כל כבל וכמה מהר צריך להשתנות אורך זה. לאחר מכן הם בונים אב-טיפוס פיזי ומפקדים על הפלטפורמה לעקוב אחר מסלול ספירלי חלק במרחב. חיישנים לאורך הכבלים רושמים את התנועות בפועל, שמתאימות בחוזקה לחיזויים. הדבר מאשר שהמודל יכול לנווט את הרובוט באופן אמין גם כאשר הגאומטריה שלו משתנה.
למצוא היכן הרובוט יכול להישאר יציב
חשוב לא פחות הוא להבין היכן הפלטפורמה התלויה יכולה להישאר במאזן. אם כבל אחד מאבד מתיחה, השליטה אובדת. המחברים מתמקדים במה שהם קוראים מרחב שיווי המשקל הסטטי: אזור המרחב שבו כל הכבלים יכולים להישמר במתח חיובי בזמן שרק כוח המשיכה פועל על הפלטפורמה. באמצעות שיטת מונטה-קרלו הם מדגמים באקראי עמדות ותנוחות רבות של הפלטפורמה ובודקים, עבור כל אחת מהן, האם המתח הנדרש בכל כבל כדי להחזיק את הפוזיציה נמצא בטווחים בטוחים. הדגימות התקינות יוצרות ענן תלת-ממדי שמגדיר את נפח העבודה הזמין לרובוט.
הרחבת טווח הרובוט על ידי כוונון חכם
מכיוון שהענפים של ה-MCSPR יכולים לשנות גובה וזווית, והפלטפורמה יכולה לשאת מטענים בעלי מסות וזוויות הטיה שונות, גודל וצורת נפח הבטיחות הזה אינם קבועים. החוקרים משתנים באופן שיטתי בגורמים אלה בתצורה של שישה ענפים. הם מראים שמטען כבד מצמצם באופן חד את האזור שבו הרובוט יכול לעמוד ללא תזוזה, בעוד בחירות חכמות של גובה הענפים והפרשי הזווית ביניהם יכולות להגדיל אותו. הם מציבים לאחר מכן בעיית אופטימיזציה: לכוונן את המטען, גובהי הענפים, זוויות הענפים וטווח הטיית הפלטפורמה כדי למקסם את נפח מרחב העבודה הבטוח. בהרצת חיפוש זה בתוכנה הם מוצאים תצורה שבה המרחב המגיע והמאוזן גדול בכמה מונים לעומת סידור נאיבי.
מדוע זה חשוב למשימות בעולם האמיתי
לעיני לא-מומחה, המסר המרכזי הוא שהרובוט הזה ניתן לעיצוב כמעט כמו ערכת בנייה, ועדיין ניתן לנתח ולכוון אותו בדיוק. על ידי שילוב חומרה מודולרית עם תכנון מתמטי קפדני וחיפוש ממוחשב, המחברים הופכים מכונה תלויה-כבלים אחת לפלטפורמה רב-תכליתית שניתן להתאים למטלות רבות — מייצור מדויק ועד שיקום — תוך ניצול מרחב הפעולה ושמירה על תמיכה בטוחה בעומסים.
ציטוט: Zhao, T., Dai, W., Zheng, F. et al. Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot. Sci Rep 16, 9210 (2026). https://doi.org/10.1038/s41598-026-37947-4
מילות מפתח: רובוטי כבל, רובוטיקה מודולרית, מנגנונים ניתנים לשינוי, מרחב עבודה של רובוט, מניפולטורים מקבילים