Clear Sky Science · he
EME‑YOLOv11 המשופר לזיהוי פגמים בפולריזר בזמן אמת
מדוע פגמים זעירים במסכים חשובים כל כך
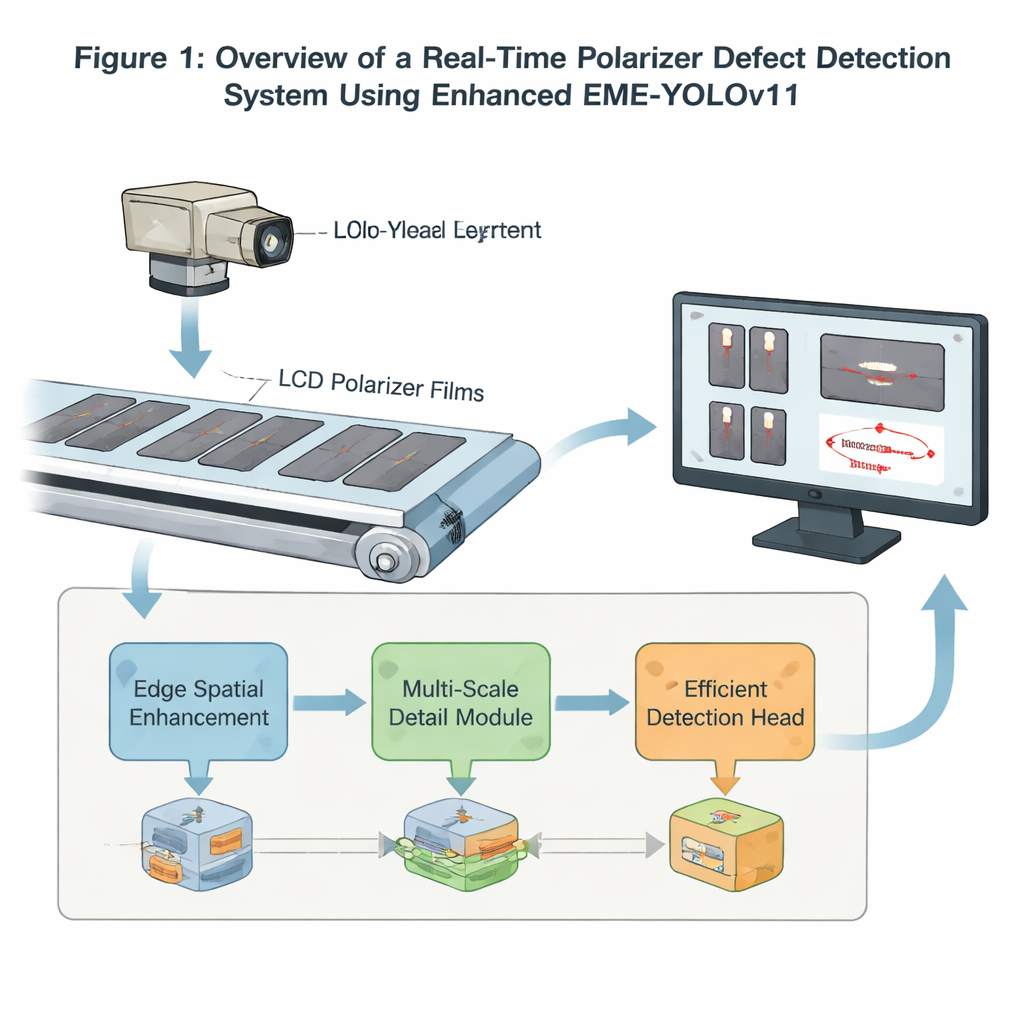
כל סמארטפון, מחשב נייד וטלוויזיה מסתמכים על סרט אופטי דק הנקרא פולריזר על מנת לשלוט באופן שבו האור עובר דרך התצוגה. אם בסרט הזה יש אפילו נקודות קטנות, כתמים או שריטות, איכות התמונה עלולה להיפגע ולפעמים לוח שלם יידרש להשלכה. כיום רוב המפעלים עדיין נשענים במידה רבה על בודקי עין אנושיים או על שיטות עיבוד תמונה ישנות כדי לאתר פגמים אלה — זה איטי, מותש ולא תמיד מהימן. מחקר זה מציג מערכת בינה מלאכותית חכמה ומהירה יותר — בשם EME‑YOLOv11 — שנועדה לתפוס פגמים אלה בזמן אמת כאשר הלוחות נעים על פס הייצור.
מעיניים אנושיות לעיניים מכניות
בתעשיית תצוגות הנוזליות (LCD), הפולריזר הוא רכיב מרכזי שמשפיע במידה רבה על הבהירות, הניגודיות וזווית הצפייה. פגמים נפוצים — כגון בועות, כתמים, חלקיקים זרים או סימני כלי עבודה — עלולים להיות ברוחב של שבר ממילימטר בלבד, אך הם יכולים להוריד את דרגת המסך או להפוך אותו לבלתי שמיש. הבדיקה המסורתית התבססה על סריקה חזותית בידי עובדים, אך בני אדם מתקשים לזהות פגמים חלשים או זעירים לאורך זמן, והערכתם משתנה לפי ניסיון ועייפות. מערכות חזון מכונה מוקדמות שיפרו זאת על ידי שימוש במצלמות ובחוקים מעוצבים ידנית למדידת צורות, מרקמים או רמות אפור. עם זאת, שיטות מבוססות חוקים אלה נכשלים כאשר צורות הפגמים משתנות, הניגודיות נמוכה או הרקעים מסובכים — כל אלה שכיחים בסרטי פולריזר.
לתת לרשתות עצביות ללמוד מה חשוב
למידה עמוקה, ובפרט רשתות עצביות קונבולוציוניות, שינתה את האופן שבו מחשבים מבינים תמונות על ידי למידת תכונות מועילות ישירות מהנתונים במקום להסתמך על חוקים מעוצבים ידנית. בתוך תחום זה, משפחת הדגמים YOLO ("You Only Look Once") הפכה לכלי עבודה לזיהוי עצמים בזמן אמת, מאזנת בין מהירות לדיוק במסגרת אנד‑טו‑אנד אחת. המחברים בונים על הדגם העדכני YOLOv11, שכבר מכוון לזיהוי מהיר, ומתאימים אותו במיוחד לבדיקה של פולריזרים. מטרתם היא להגביר את הרגישות של הדגם לפגמים עדינים, לשמור על משקלו קל מספיק לפריסה תעשייתית, ועדיין לעבד תמונות במהירות שתאפשר לעמוד בקצב פסי הייצור הנעים.
חידוד קצוות והתמקדות בפרטים עדינים
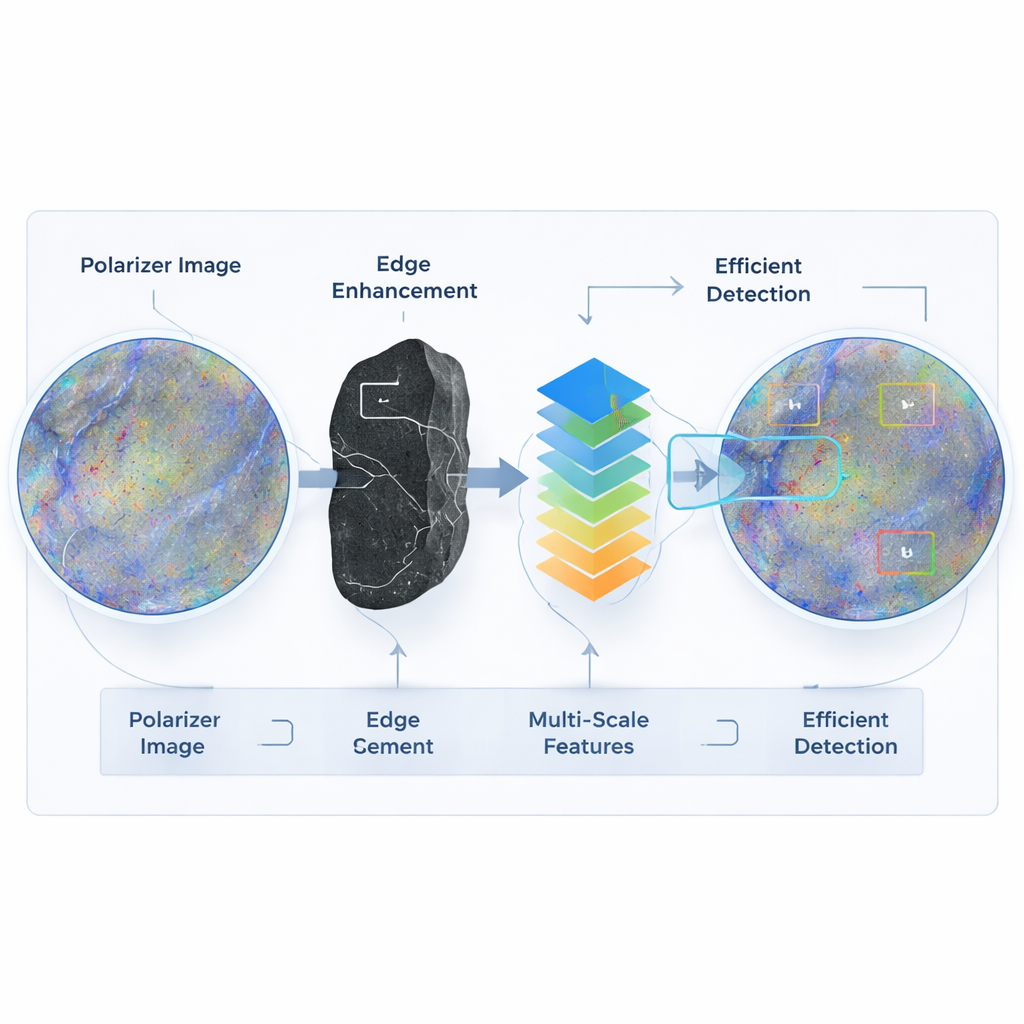
השיפור המרכזי הראשון מתמקד באופן שבו הרשת רואה קצוות ודפוסים מרחביים. המחברים מחליפים בלוק סטנדרטי בגוף ה‑backbone של YOLOv11 במודול חדש המריץ שני זרמים במקביל: זרם אחד משתמש באופרטור סובל — מסנן קצה קלאסי ויעיל — כדי להדגיש שינויים חדים בעוצמת האור, והזרם השני משתמש בקונבולוציות רגילות כדי לשמר מרקמים ומבנים רחבים יותר. על ידי פיוז'ן של שתי התצפיות האלו והאכלתן קדימה, המערכת משתפרת בהדגשת הגבולות החלשים של כתמים וסימנים שלולא כן היו מתמזגים עם הרקע. מודול שני כותב מחדש את האופן שבו הרשת מסתכלת על פרטים בקני מידה שונים. במקום pooling, שעלול למחוק וריאציות עדינות, המחברים משתמשים בקונבולוציות מדללות (dilated convolutions) במרווחים שנבחרו בקפידה. זה מאפשר לדגם ללכוד גם תכונות מקומיות זעירות וגם הקשר רחב יותר מבלי לנפח את מספר הפרמטרים, ועוזר לזהות פגמים קטנים ובלתי סדירים כמו גם פגמים גדולים יותר.
החלטות מהירות יותר עם ראש זיהוי קל יותר
בסוף הרשת, "הראש" שעוצב מחדש ממיר מפות תכונה לניבויים קונקרטיים לגבי מיקום וסוג הפגמים. המחברים מארגנים חלק זה מחדש לשלוש רמות רזולוציה — דקה לפגמים זעירים, בינונית לפגמים טיפוסיים וגסה לפגמים גדולים — מחליפים קונבולוציות סטנדרטיות בקונבולוציות מקובצות (grouped convolutions), שמפצלות את החישובים לחסימות קטנות ומקבילות. הראש גם מפריד בין סיווג (איזה סוג פגם) לבין יישור תיבת הזיהוי (מיקום מדויק). צירוף זה מקטין את כמות החישובים וגודל המודל תוך שמירה על שיפור בדיוק. במבחנים על מערך נתונים תעשייתי אמיתי של כמעט 4,000 תמונות פולריזר, ה‑EME‑YOLOv11 המשופר עלה על לא רק YOLOv11 המקורי אלא גם על גלאים פופולריים אחרים חד‑שלביים ומבוססי טרנספורמר, והשיג דיוק וזכירה גבוהים יותר עם פחות חישובי נקודה צפה ופחות פרמטרים.
מה זה אומר למסכים של כולנו
פשוט מאוד, EME‑YOLOv11 היא קבוצה חכמה ויעילה יותר של "עיניים מכניות" לבדיקת פולריזרים. על ידי חידוד קצוות, שימור פרטים עדינים ופישוט שכבות קבלת ההחלטות, היא תופסת יותר פגמים אמיתיים ועדיין מהירה מספיק לשימוש במפעלים אמיתיים. למרות שהמבחנים הנוכחיים הושפעו על כרטיס גרפי יוקרתי, העיצוב הקומפקטי מצביע על פריסה עתידית במכשירים מוטמעים שיוצבו ישירות על פסי הייצור. אם מערכות כאלה יאומצו בקנה מידה רחב, היצרנים יוכלו לבזבז פחות לוחות, לייצב איכות ולהפחית עלויות — כל אלה בסופו של דבר משפרים את האמינות והמראה של המסכים שאנו משתמשים בהם מדי יום.
ציטוט: Liu, R., Jing, C., Zhang, T. et al. The enhanced EME-YOLOv11 for real-time polarizer defect detection. Sci Rep 16, 7414 (2026). https://doi.org/10.1038/s41598-026-37884-2
מילות מפתח: פגמי פולריזר, בדיקות תעשייתיות, למידה עמוקה, זיהוי עצמים YOLO, חזון מכונה