Clear Sky Science · he
אוטומציה של בטיחות תעשייתית בזמן אמת באמצעות ארכיטקטורות YOLO המנצלים תחומי כרומטיות מגוונים
עיניים חכמות יותר על רצפת המפעל
פגמים חבויים בהריתוכים מתכתיים יכולים להפוך מכונות חזקות, גשרים או צינורות לסכנות שקטות. באופן מסורתי, בודקים מיומנים מביטים בתפרים הזוהרים של המתכת ומנסים לזהות סדקים או חריצים זעירים לפני שהם גורמים לתקלות. מאמר זה בוחן כיצד בינה מלאכותית יכולה לקחת על עצמה חלק גדול מעבודת הפיקוח הזו, באמצעות תוכנת זיהוי תמונה מהירה הבודקת ריתוכים בזמן אמת, אפילו כאשר חלקים נעים על פס ייצור. על ידי השוואת מספר גרסאות של גלאי AI פופולרי בשם YOLO ובחינת כיצד דרכי ייצוג צבע שונות משפיעות על הראייה שלו, החוקרים מצביעים על דרך לעבר מפעלים בטוחים ויעילים יותר.
מדוע זיהוי ריתוכים פגומים קשה כל כך
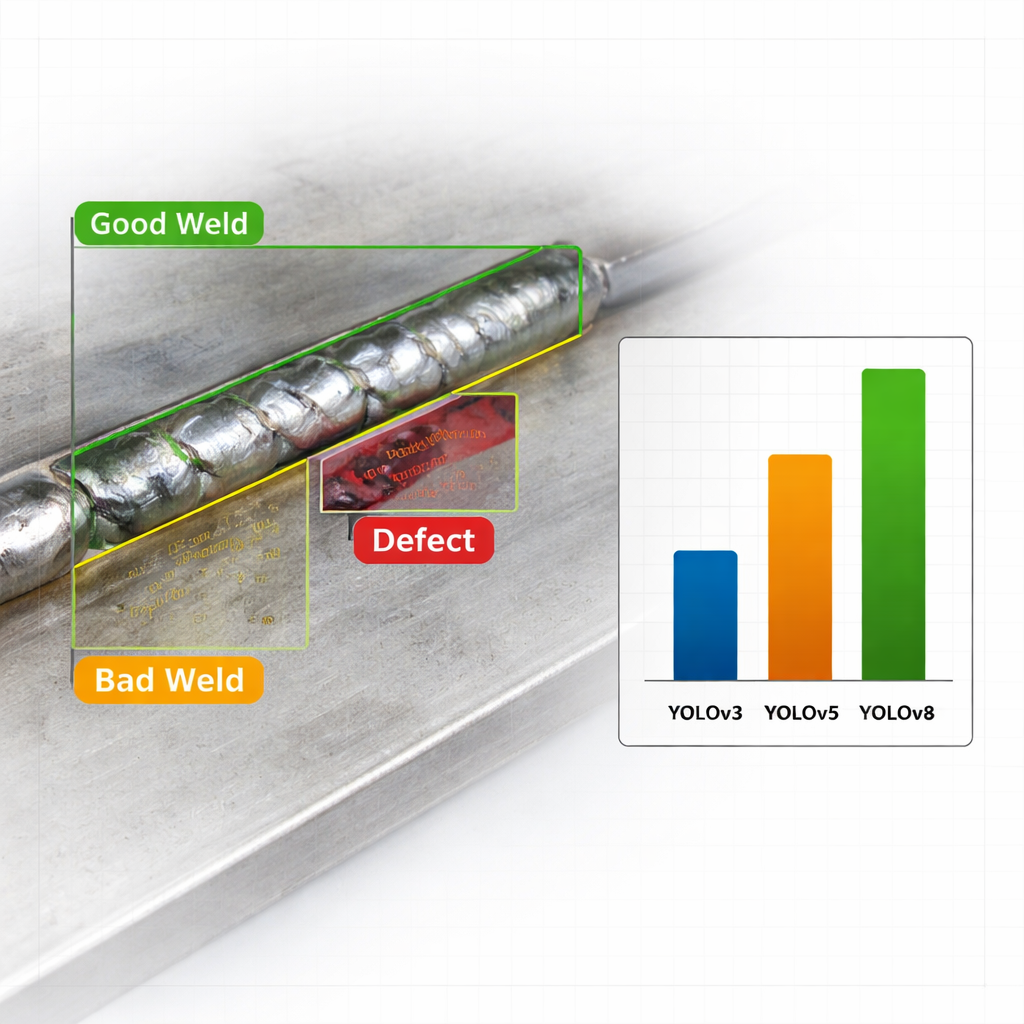
על קו ייצור עמוס, ריתוכים משתנים בצורה, בברק ובמרקע שמסביב. תמונה בודדת עלולה להכיל מספר ריתוכים ופגמים, מה שהופך סיווג תמונה פשוט ("טוב" או "רע" באופן כללי) לשיטה גסה מדי. במקום זאת, המערכת חייבת גם לאתר וגם לתייג אזורי בעיה ספציפיים לאורך התפר. המחברים מתמקדים בשלוש קטגוריות מעשיות—ריתוך טוב, ריתוך רע, ופגם מובהק—כיוון שלכל אחת נדרשת תגובה שונה, מהסכמה על חלק ועד תיקון מיידי. הם משתמשים במאגר נתונים זמין לציבור של יותר משש אלף תמונות ריתוך מסומנות, וכך מבטיחים שה-AI יהיה מאומן ונבדק על מגוון ריאלי של משטחים, תנאי תאורה וסוגי פגמים.
מלמדים מכונות ‘‘להסתכל פעם אחת’’ ולהחליט
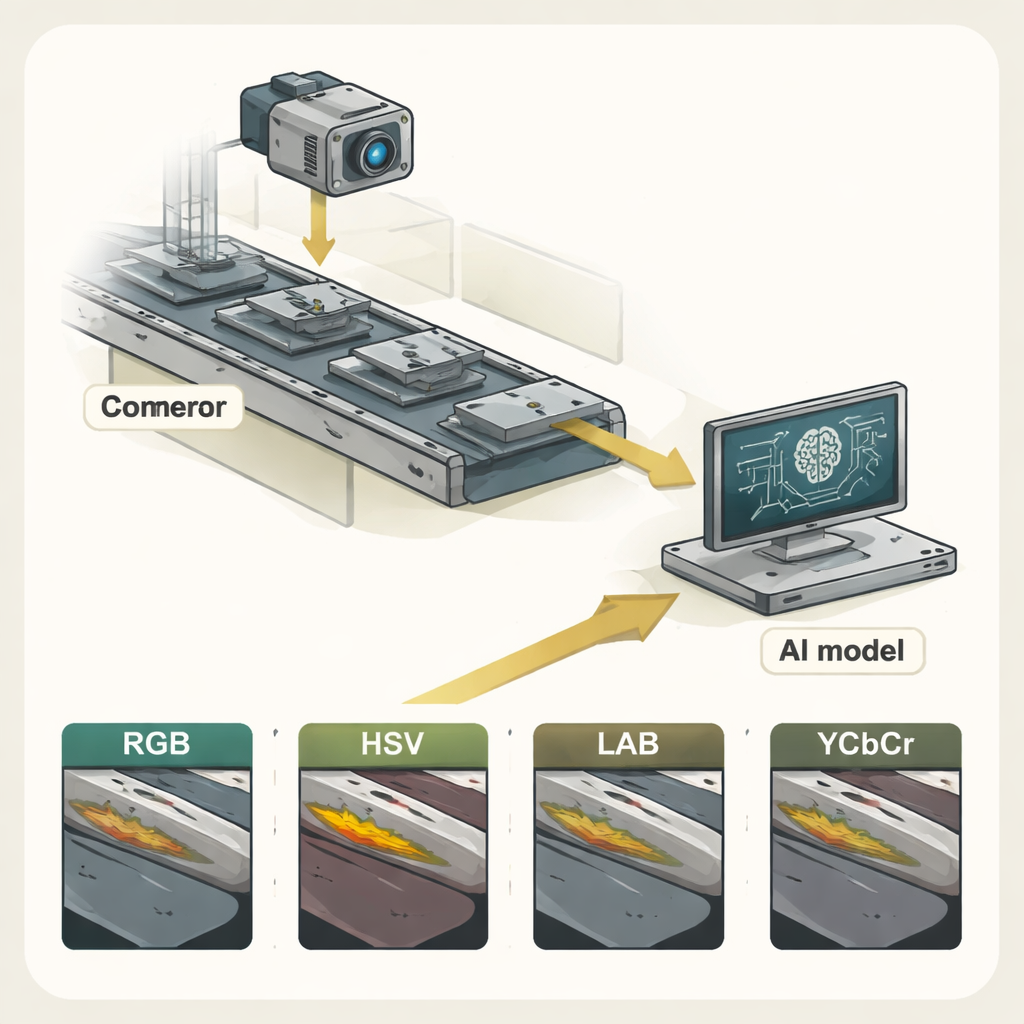
המחקר מתרכז במשפחת דגמי זיהוי העצמים YOLO ("You Only Look Once"), הידועה בסריקת תמונה בעברה אחת ושרטוט מסגרות סביב מה שהיא מוצאת. החוקרים משווים שלוש דורות: YOLOv3, YOLOv5, והעדכני YOLOv8. כל גירסה משפרת מהירות ודיוק באמצעות רשתות עמוקות יותר ואסטרטגיות אימון מתוחכמות. כדי לדמות את אתגרי התאורה במפעלים אמיתיים, הצוות גם ממיר כל תמונת ריתוך לארבעה מרחבי צבע שונים—RGB (האדום–ירוק–כחול המוכר), HSV, LAB ו-YCbCr—ומאמן מודלים נפרדים על כל אחד מהם. גישה מרובת ספקטרום זו מאפשרת להם לשאול שאלה ממוקדת: האם שינוי האופן שבו הצבע מקודד עוזר ל-AI לראות פגמים בצורה ברורה יותר?
צבע, מהירות ודיוק בפעולה
בכל הניסויים דפוס אחד ברור: המודל החדש ביותר, YOLOv8, עולה על קודמיו. כאשר מאומן על תמונות RGB סטנדרטיות, YOLOv8 משיג דיוק ממוצע ממוין (mAP@0.5) של 0.592, גבוה במידה ניכרת לעומת YOLOv3 ו-YOLOv5 בתנאים זהים. במונחים מעשיים, זה אומר שהוא טוב יותר גם באיתור וגם בתיוג נכון של אזורי ריתוך. המודל גם מהיר מאוד, מעבד בערך 138 תמונות לשנייה על כרטיס גרפי מודרני—הרבה מעל 30 פריימים לשנייה המשמשים לעתים קרובות כסף-גבול בזמן אמת. בין מרחבי הצבע, RGB מספק תוצאות חזקות בעקביות עבור כל שלוש גרסאות ה-YOLO, בעוד HSV, LAB ו-YCbCr נופלים מאחור. קידודים חלופיים אלה עשויים להבליט תכונות ויזואליות מסוימות, אך בהקשר זה הם לא גוברים על הפשטות ותכולת המידע של RGB.
מבדיקות במעבדה אל קצה המפעל
כדי להדגים ישימות בעולם האמיתי, המחברים פרסו מודל YOLOv8 ממוטב על מכשיר קצה מבוסס Raspberry Pi המקושר לפס ייצור ולמצלמה. כאשר חלקים מרותכים נעים מתחת לעדשה, המערכת לוכדת פריימים, מנקה אותם באמצעות עיבוד מקדים בסיסי ומבצעת זיהוי באופן מקומי, מסווגת כל ריתוך כטוב, רע או פגום. התוצאות נרשמות במסד נתונים ומוצגות על לוח בקרה לבודקים, שיכולים לראות סימוני פגמים בזמן אמת ומגמות איכות לטווח הארוך. בנוסף, המסגרת יכולה להפיק המלצות, כגון התאמות למהירות הריתוך או למתח, או דגלים למתי יש צורך בתחזוקת ציוד בהתבסס על חזרות פגמים.
מה משמעות הדבר לייצור בטוח יותר
לציבור הרחב, התוצאה המרכזית ברורה: עבודה זו מראה שמודל AI קל משקל ומודרני יכול לסמן באופן אמין ומהיר ריתוכים מסוכנים בתנאי תעשייה אמיתיים, במיוחד כאשר הוא משתמש בתמונות מצלמה רגילות בפורמט RGB. YOLOv8 מוכיח שהוא מדויק מספיק להבחין בריתוכים רעים באופן ברור ומהיר מספיק לעמוד בקצבי ייצור מהירים, וכל זאת בזמן הרצה על חומרה צנועה קרוב למכונות. המחברים טוענים שסוג זה של בדיקה אוטומטית, מודעת לצבע, יכול להפחית טעויות אנוש, לתפוס בעיות מוקדם יותר ולתמוך בייצור בטוח ואחיד יותר. שיפורים עתידיים—כמו נתוני אימון עשירים יותר וטיפול משופר בסוגי פגמים עדינים יותר—יכולים להפוך את הבודקים הדיגיטליים הללו לחלק שגרתי של בטיחות תעשייתית.
ציטוט: Pati, N., Sharma, A., Gourisaria, M.K. et al. A real-time industrial safety automation using YOLO architectures leveraging diverse chromatic domains. Sci Rep 16, 7253 (2026). https://doi.org/10.1038/s41598-026-37869-1
מילות מפתח: גילוי פגמים בהריתוכים, אוטומציה של בטיחות תעשייתית, YOLOv8, ראייה ממוחשבת בזמן אמת, Edge AI