Clear Sky Science · he
תכנון מסלול אוטונומי לאולטרא-סאונד רובוטי בין הצלעות באמצעות למידת חיזוק
רובוטים שמסייעים לרופאים לראות דרך הצלעות
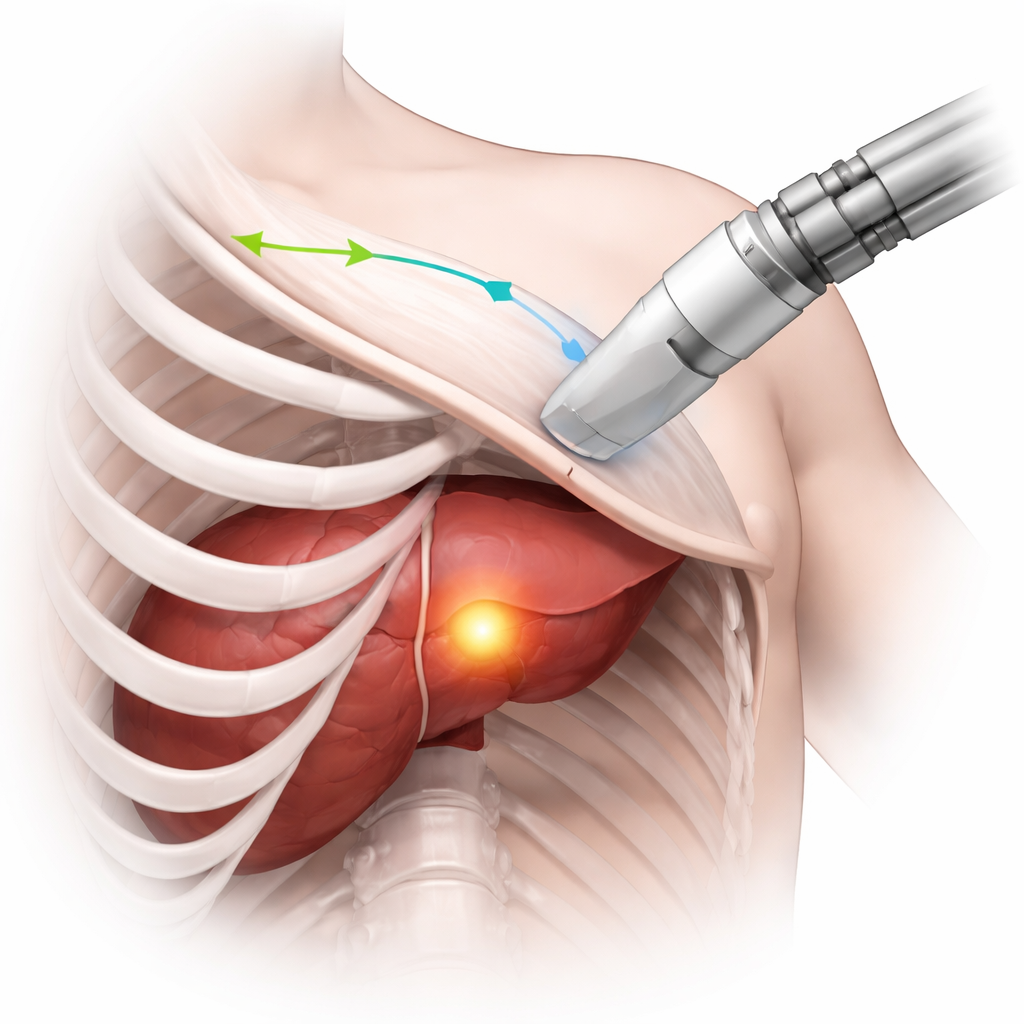
כשרופאים משתמשים באולטרא-סאונד למעקב אחרי איברים כמו הכבד או הלב, הצלעות לעתים קרובות מפריעות וזורעות צללים כהים שמסתירים פרטים חשובים. קבלת תמונה ברורה תלויה באופן משמעותי בכישרון ובניסיון של מי שמחזיק את הגלאי. המחקר הזה חוקר כיצד רובוט, מונחה על-ידי בינה מלאכותית, יכול לתכנן באופן אוטונומי מסלול סריקה בין הצלעות כך שהגידולים ומטרות אחרות יראו בצורה ברורה ועקבית, ללא קשר למי מפעיל את המכשיר.
מדוע קשה לראות בין הצלעות
אולטרא-סאונד פופולרי כי הוא בטוח, משתלם ומספק תמונות בזמן אמת. אך כדי לדמות איברים הנמצאים מאחורי בית החזה, יש להנחות את הגלאי בזהירות דרך המרווחים הצרים בין הצלעות. אם גלי הקול פוגעים בעצם, הם נחסמים, ויוצרים אזורים שחורים גדולים בתמונה שבהם לא ניתן לראות דבר. מפעילים אנושיים לומדים, באמצעות אימון וניסיון, כיצד להזיז ולהטות את הגלאי כדי להימנע מהצללים הללו תוך שמירה על אזור העניין בתוך השדה. הדבר חשוב במיוחד בהליכים כמו אבדסיה של גידולי כבד, שבהם המנתחים חייבים לבדוק שוב ושוב שהגידול כולו טופל. האתגר הוא להפוך מיומנות עדינה תלת־ממדית זו לדבר שרובוט יכול לבצע בעצמו.
להדריך רובוט באמצעות מטופלים וירטואליים
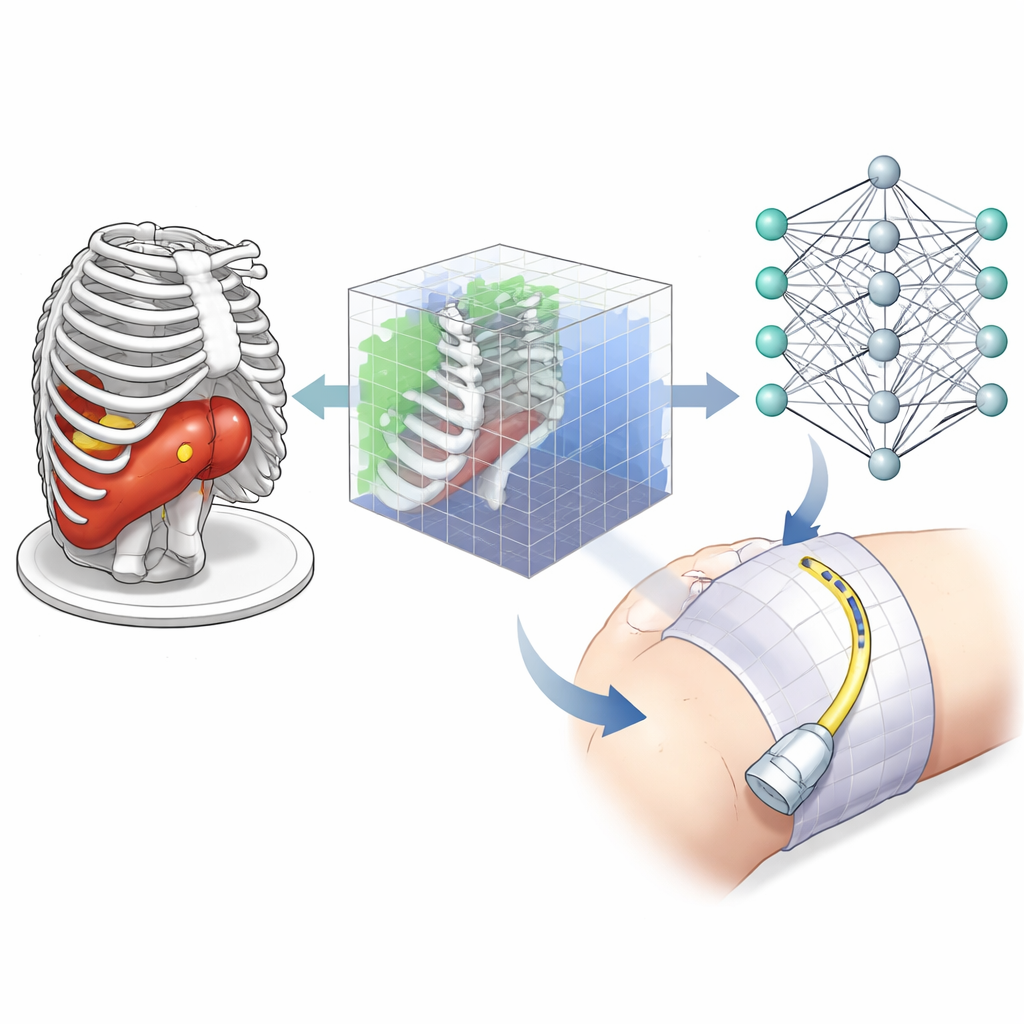
במקום ללמוד ישירות מתמונות אולטרא-סאונד רועשות ומשתנות, החוקרים בנו זירה אימונים וירטואלית באמצעות סריקות טומוגרפיה ממוחשבת (CT). CT מספק מפת תלת־ממד חדה של העצמות, העור והכבד, וניתן להוסיף גידולים בצורות ומיקומים שונים כדי ליצור תרחישים מציאותיים רבים. בסימולטור הזה, גלאי אולטרא-סאונד וירטואלי נע על פני משטח העור מעל הצלעות, ודרכי קרני האולטרא-סאונד מדומיינות כקרניים העוברות ברקמות רכות אך נחסמות על-ידי עצם. מודל פשוט אך ריאלי זה מודיע למערכת אילו חלקים מהגידול נראים, כמה האות נחלש תוך כדי נסיעה והיכן מופיעים צללים.
כיצד מערכת הלמידה מחליטה היכן לסרוק
הצוות השתמש בצורת בינה מלאכותית הנקראת למידת חיזוק, שבה "סוכן" לומד באמצעות ניסוי וטעייה לבחור פעולות שמניבות פרסים גבוהים יותר. בכל שלב, הסוכן רואה ייצוג תלת־ממדי קומפקטי של הסצנה סביב הגידול: אילו נפחי ווקסל (יחידות נפח קטנות) מכילים גידול, אילו מכילים עצם, ואילו חוצים על-ידי קרני האולטרא-סאונד המדומות. הוא יכול אז להזיז או להטות את הגלאי הוירטואלי במרווחים קטנים, או להחליף בין מצב "חיפוש" לבין מצב "הקלטה" המשמש לבניית התצוגה התלת־ממדית הסופית. הפרס שהוא מקבל משלב שלושה יעדים: לכסות כמה שיותר מהנפח המטרה, לשמור על מרחק מספיק קטן כדי להפחית אובדן אות, ולהימנע מאזורים שבהם הקרניים נחסמות על-ידי העצם, מה שייצור תמונות חסרות־תועלת וצלולות.
מבחן השיטה
כדי לבדוק האם האסטרטגיה הנלמדת מתכללת מעבר לדוגמאות האימון, החוקרים בדקו אותה על סריקות CT חדשות וצורות גידול חדשות שהסוכן לא נתקל בהן מעולם. בניסויים אלה, תוכנית סריקה נחשבה מוצלחת אם לפחות 95% מנפח המטרה הושגו בתוך מספר מוגבל של צעדים. עבור מטרות קטנות, בינוניות וגדולות, המערכת השיגה שיעורי הצלחה של עד 95%, תוך שמירה על אחוז גבוה של תצוגות ללא צל וזמני מרחק סבירים בין הגלאי לגידול. השיטה עבדה גם כאשר היו מספר מטרות לכסות, כגון נקודות של גידול שארית התפזרו בכבד, אם כי הביצועים ירדו מעט באופן טבעי ככל שהמשימה נעשתה מורכבת יותר.
מהסימולציה לחדר הניתוח
כרגע, העבודה מתמקדת בתכנון המסלול ולא בהזזת רובוט ממשי. המסלולים נוצרים על סריקות CT ספציפיות למטופל או על "אטלסים" כלליים של CT שאפשר להתאים מאוחר יותר לאנטומיה של הפרט באמצעות טכניקות רישום קיימות. בעתיד, מודול התכנון הזה מיועד להשתלב עם בקרה רובוטית, פיצוי על תנועה נשימתית וסימולציה ריאליסטית יותר של תמונות אולטרא-סאונד. עבור הקורא שאינו מומחה, המסקנה המרכזית היא שהגישה הזו עשויה להפוך את המעקב באולטרא-סאונד במהלך הליכים כמו טיפול בגידולי כבד לאמינה פחות ותלויה פחות במומחיות המפעיל, בכך שהיא מאפשרת לרובוט למצוא מסלולים חכמים וללא צל בין הצלעות כדי לשמור על כלל המטרה בנוף הראייה.
ציטוט: Bi, Y., Qian, C., Zhang, Z. et al. Autonomous path planning for intercostal robotic ultrasound imaging using reinforcement learning. Sci Rep 16, 6356 (2026). https://doi.org/10.1038/s41598-026-37702-9
מילות מפתח: אולטרא-סאונד רובוטי, למידת חיזוק, דימות גידולי כבד, סריקה בין-צלעית, רובוטיקה רפואית