Clear Sky Science · he
תכנון מסלולים מודע-איכות דינמית לידיות רובוטיות 6 DoF באמצעות BiRRT ואופטימיזציה מטה-היוריסטית על בסיס נתיבי B-spline
רובוטים שנעים בחלקות ובבטחה
רובוטים תעשייתיים היום חולקים מרחבי עבודה צפופים עם אנשים, כלים ומערכות מסועים. בתוך המרחבים הצפופים האלה, זרוע רובוטית לא יכולה פשוט להגיע מנקודה A לנקודה B; עליה לעשות זאת ללא התנגשות, בצריכת אנרגיה נמוכה, וללא זעזועים שעלולים לפגוע בה או בציוד סמוך. מאמר זה מתאר שיטה פרקטית לתכנון תנועות זהירות שכאלה עבור זרוע תעשייתית טיפוסית בעלת שישה מפרקים, שממירה מסלולים גסיים שנמצאו על-ידי מחשב לתנועות חלקות, מודעות אנרגיה, שניתן לבצע בבטחה על חומרת מפעל אמיתי.
מדוע תכנון הגעה פשוטה כל כך מסובך
כאשר זרוע רובוטית נעה, יש לאזן בו-זמנית גורמים רבים. המסלול צריך להיות קצר כדי שהמשימות יסתיימו במהירות, צריכת האנרגיה צריכה להיות מתונה כדי להגביל חום ושחיקה, והתנועה צריכה להיות עדינה כך שהזרוע לא תזדעזע או תרעיד. גישות קלאסיות מציירות עקומות מתמטיות חלקות (כמו spline) דרך נקודות דרך שנבחרו ביד, וזה עובד טוב במרחב פתוח אך עלול להיות לא יעיל או אף לא בטוח בתאים צפופים. שיטות דגימה חדשות יותר, כמו Rapidly Exploring Random Trees (RRT), טובות בניווט בשדות מכשולים מורכבים אך נוטות לייצר מסלולים עם פיתולים חדים שפוגעים במנועים ובגלגלי השיניים. המחברים טוענים שאף אחת מהמשפחות האלה של שיטות אינה מספיקה לבדה; במקום זאת הם משלבים אותן במסגרת דו-שלבית.
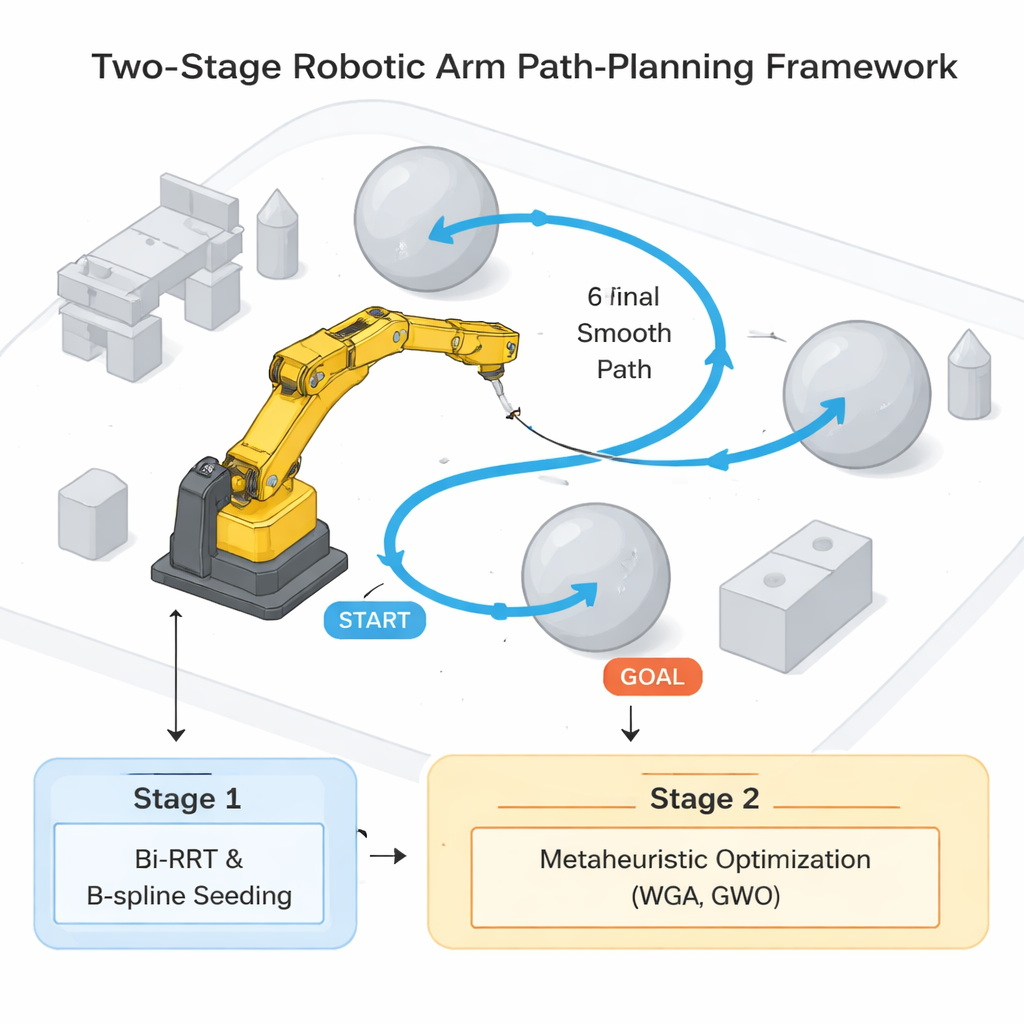
מפת דרכים דו-שלבית לתנועת רובוט
בשלב הראשון הצוות בונה "נתיב ייחוס" בטוח במרחב המפרקי של הרובוט במקום רק במיקום הזרוע. הם מתחילים מעקומת B-spline חלקה שמחברת את מיקום ההתחלה והיעד תוך עקיפה של מכשולים כדוריים בשולי בטיחות. עקומה זו מדריכה לאחר מכן מתכנן Bi-RRT (RRT דו-כיווני) שמגדל שתי עצים אקראיים—מההתחלה ומהיעד—עד שהם נפגשים במסלול ללא התנגשות. לאורך הדרך כל תנועה ניסיונית של כל הזרוע נבדקת מול צורות מכשול מפושטות. ברגע שנמצא מסלול, פיתולים מיותרים מתקצרים באמצעות "קיצוץ" (short-cutting), והתוצאה מבוטאת מחדש כספлайн פרמטרי-זמן שניתן, עקרונית, לעקוב אחריו על ידי הרובוט.
להקנות לרובוט תנועה עדינה יותר
השלב השני לוקח את המסלול הקבילי אך לא מושלם הזה ומכוון אותו לאיכות. כאן המחברים משתמשים בשתי שיטות אופטימיזציה בהשראת הטבע: היבריד של אלגוריתם הלווייתן–גנטי (WGA) ואלגוריתם זאבי האפור (GWO). שתי השיטות פועלות על קבוצה מוגבלת של נקודות בקרה ומחוללי זמן לאורך הספליין המקורי, אך מורשות להזיז נקודות אלו רק בתוך מסלולי ביטחון שחושבו מראש סביב המסלול. כל מועמד למהלך מדורג על-פי מדד משולב יחיד המאחד שלושה מרכיבים: המרחק שהכף של הרובוט נעה, כמות האנרגיה ברמת המפרק שנצרכה (בהתבסס על מאפייני כל מנוע), ועד כמה המפרקים "קופצניים"—כמה מהר משתנים התאוציות שלהם לאורך הזמן. על ידי הצעה, בדיקה ושיפור חוזר של מסלולים מועמדים, הממטבנים הללו מחפשים תנועות שעדיין ללא התנגשות אך חלקות ומוכנות יותר לביצוע.
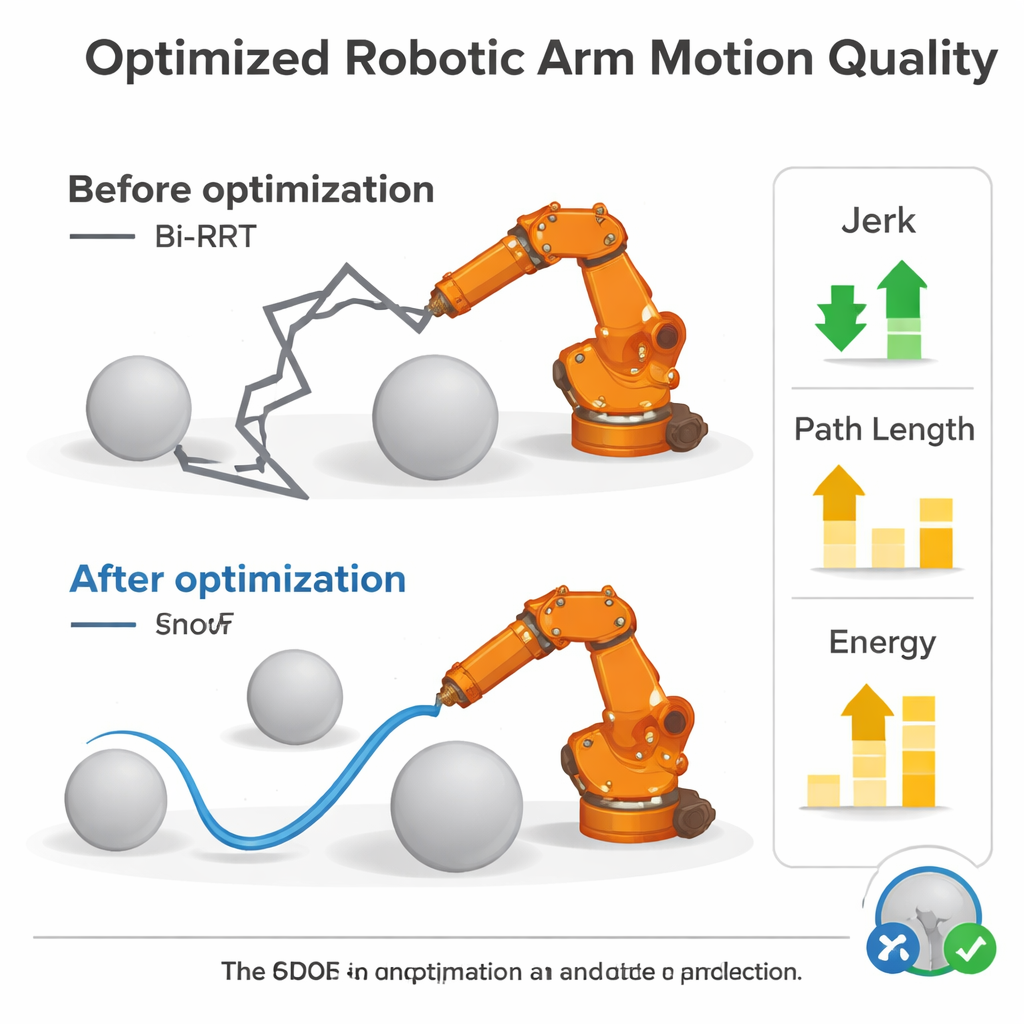
מה המדמות מגלות
המחברים בודקים את הצינור שלהם על מודל דיגיטלי של זרוע תעשייתית נפוצה, KUKA KR 4 R600, הנעה דרך סצנה של שלושה מכשולים על מהלך קבוע של שתי שניות. פתרון טהור המבוסס על ספליין כבר יחסית חלק אך לא מנצל באופן שיטתי את כל הנתיבים הבטוחים האפשריים. Bi-RRT עם קיצוץ מוצא מסלול באורך גאומטרי דומה ואף בצריכת אנרגיה נמוכה יותר, אך בעל חסרון משמעותי: מדד הקפיציות (jerk)—מדד לקצב השינוי של התאוצה במפרקים—גבוה בכ-עשר פעמים, מה שמעיד על תנועה שסביר שתעורר רטטים ועמידות במכונה אמתית. לאחר יישום WGA או GWO, הקפיציות מצטמצמת בכ-94–96 אחוז יחסית למסלול ה-Bi-RRT הגולמי. היישור הדרמטי הזה בא על חשבון עלייה צנועה באורך הנסיעה (כ-15–17 אחוז) ובאנרגיה (ככפול), פשרה שהמחברים טוענים שכדאי לשלם עבור ציוד אמיתי.
מתיאוריה לרצפת המפעל
ללא-מומחה, המסקנה המרכזית היא שהמחברים מספקים מתכון קונקרטי—ועד כלים מבוססי MATLAB—להפיכת הרעיון הראשוני והגס של איך הרובוט צריך לזוז לתנועה מלוטשת המתאימה לחומרה. גישתם קודם מבטיחה שקיים מסלול דרך סביבה צפופה, ולאחר מכן מעצבת מחדש את המסלול כך שהזרוע תנוע בפחות זעזועים תוך שמירה על כל גבולות המפרקים והמרווחים. התוצאה הסופית היא משפחת תנועות שרובוט תעשייתי אמיתי יכול לבצע בבטחה ובאמינות רבה יותר, ומניחה בסיס להרחבות עתידיות שבהן רובוטים חולקים מרחבי עבודה עם בני אדם ומתאימים את תנועותיהם בזמן אמת באמצעות מצלמות ואפילו ממשקי אותות מוח.
ציטוט: Elgohr, A.T., Rashad, M., El-Gendy, E.M. et al. Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths. Sci Rep 16, 7487 (2026). https://doi.org/10.1038/s41598-026-37676-8
מילות מפתח: תכנון מסלול רובוטי, זרוע רובוטית תעשייתית, הימנעות התנגשויות, חלקות תנועה, אופטימיזציה מטה-היוריסטית