Clear Sky Science · he
תכנון תנועה והרחבת תצורה בטוחה לצוותי רחפנים ורכבי קרקע הטרוגניים בסביבות צפופות
רובוטים שמשתפים פעולה באוויר ובקרקע
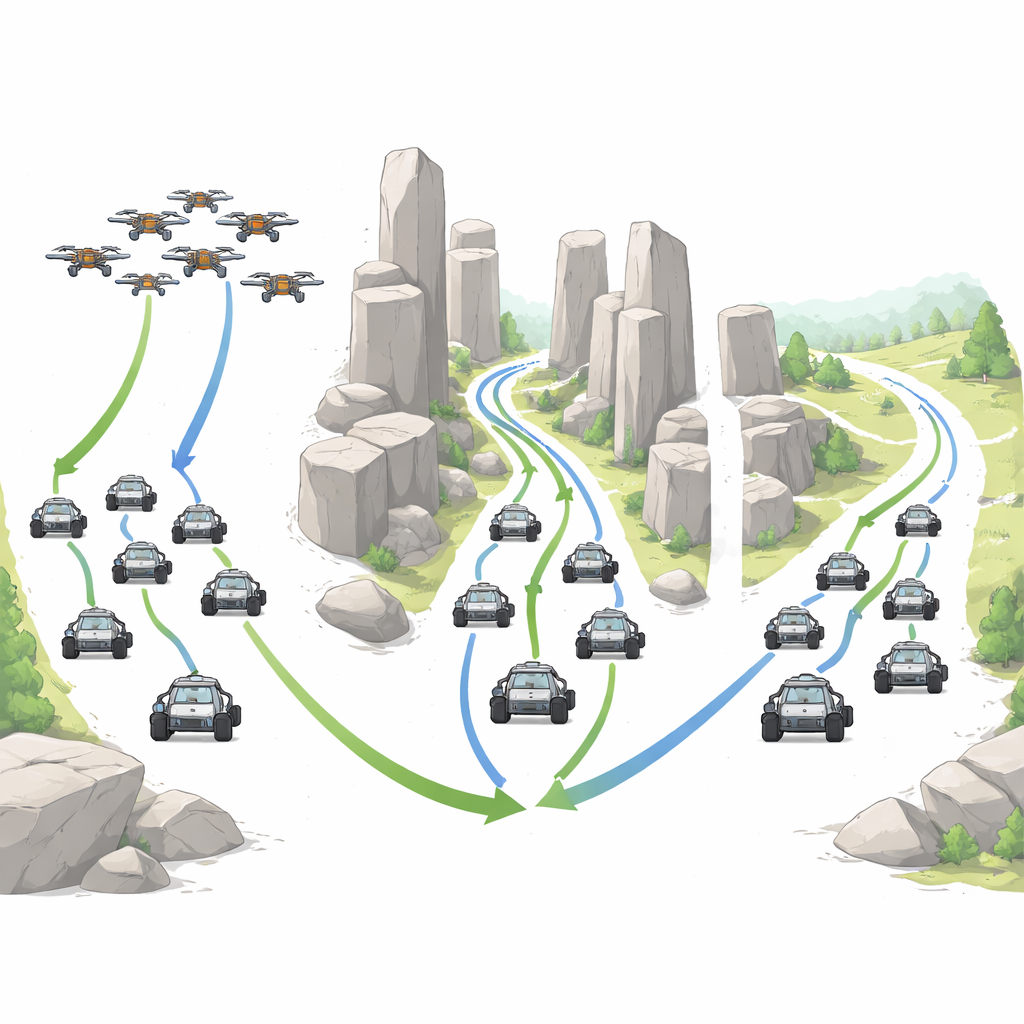
דמיינו נחיל של רחפנים קטנים המבררים מעל אזור אסון בעוד רכבי קרקע קשוחים זוחלים דרך הריסות מתחתם, כולם נעים כקבוצה מתואמת אחת. מאמר זה חוקר כיצד לשמור על קבוצות רובוטים מעורבות כאלה יחד בחללים צרים ומלאי מכשולים בלי התנגשות או תכנון מחדש נואש. המחברים מציעים שיטה חדשה שבה רובוטים אוויריים וקרקעיים שותפים תצורה יציבה, מצטמצמים דרך פתחים צרים ועדיין מגיעים במהירות ובבטחה ליעדם.
למה קשה לתאם צוותים מעורבים
רחפנים ורכבי קרקע מתנהגים באופן שונה מאוד. רחפנים נעים במרחב תלת-ממדי ונוטים להסיח מהמסלול מהרוח. רכבי קרקע כפופים למגבלות פנייה ומתמודדים עם שטח קשה. ועדיין, משימות רבות — ממחפשים והצלה ועד בדיקות תשתית — יהנו אם הרובוטים יוכלו לנוע יחד כקבוצה תלת-ממדית אחידה. שיטות קיימות לעתים קרובות מטפלות בשמירה על תצורה ובהימנעות ממכשולים כבעיות נפרדות. כשהסביבה הופכת צפופה, התצורות נוטות להתפרק ולהתאחד שוב מאוחר יותר, ובכך מבזבזות זמן ומגבירות את הסיכון להתנגשויות.
דרך חדשה לשמור על הקבוצה יחד
כדי להתמודד עם זאת, המחברים מעצבים מסגרת שהם קוראים לה RG–ASAPF, שמקשרת באופן הדוק בין צורת הקבוצה ובין התנועה שלה. בליבה יש תיאור מתמטי של התצורה כ"מבנה קשיח": המרחקים הרצויים בין הרובוטים נבחרים כך שהצורה הכוללת נקבעת באופן ייחודי, כפי שבסגירה של שלד תלת-ממדי יציב. כל רובוט משתמש בכלל משותף כדי לכוון את תנועתו כך שמרחקים אלה ישוחזרו וישמרו, גם בזמן שהתצורה נעה ופונה. כלל זה מעוצב לשימוש הן ברחפנים והן ברכבים שגלגלים, והוא מסתגל בזמן אמת לאי-ודאויות כגון חיכוך שלא נכלל במודל או דחיפות חיצוניות קטנות.
מאפשרים לתצורה "לנשום" דרך מרווחים צרים
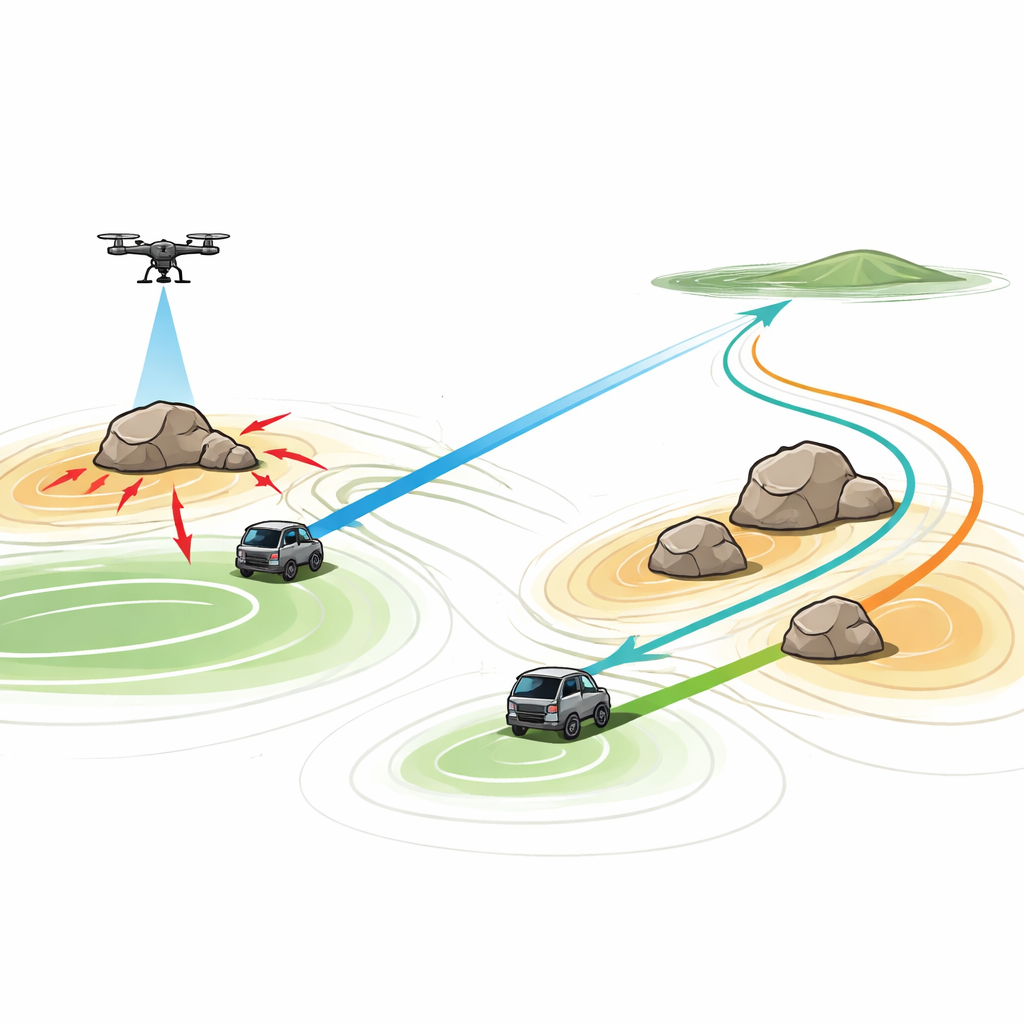
סביבות אמיתיות נדירות הן שדות פתוחים; הן מלאות בבניינים, עצים, כלי רכב וחפצים נעים. תצורה שהיא בטוחה במרחב פתוח עלולה להיות גדולה מדי כדי לעבור בסמטה צרה או בצביר מכשולים צפוף. השיטה המוצעת מאפשרת לתצורה להמירג במהירות — להתכווץ או להתרחב בגודלה הכולל — תוך שמירה על המבנה הבסיסי שלה. הצוות מציג רכב קרקע מוביל שמתכנן מסלול באמצעות שדה פוטנציאלי מלאכותי, שבו המטרה פועלת כאטרקטור והמכשולים דוחפים את התצורה החוצה. בניגוד לשדות פוטנציאליים מסורתיים, שעלולים להיתקע במבוי סתום או לגרום לתנועה רועדת, הגרסה שלהם ה"בטוחה המסתגלת" מכוונת ברצף עד כמה המכשולים דוחים את הרובוטים, כך שישמר מרחק בטוח מבלי להפוך זהיר מדי או להיתקע.
נתיבים חכמים דרך עומס ותנועה
השדה הפוטנציאלי מעודן עוד יותר כך שה"נוף" הכולל של משיכה ודחייה תמיד יכיל את נקודת המינימום שלו ביעד. זה מסייע למנוע מהתצורה להיתקע בנקודות לא נוחות בין מכשולים. עוצמת ההשפעה הדוחפת מותאמת בזמן אמת באמצעות כלל למידה פשוט שמיובא מאימון רשתות נוירונים מוקדם. כאשר רובוטים מתקרבים מדי למכשולים, הדחייה גדלה אוטומטית; כשיש מרחב פנוי מספק, היא נרגעת. אם הסביבה הופכת כה צפופה שגם תצורה מוקטנת אינה יכולה לעבור בבטחה, השיטה מפעילה תוכנית גיבוי: הקבוצה נעצרת לרגע, מרחיבה מסלול בטיחות מדומיין, ומעצבת מחדש מסלול בטוח יותר סביב האזור הבעייתי לפני ההמשך.
בדיקה בעולמות וירטואליים
כדי לבדוק עד כמה השיטה עובדת, המחברים מריצים סימולציות מחשב נרחבות עם צוותים מעורבים של רחפנים ורכבי קרקע. הם בודקים אזורים פתוחים עם מעט מכשולים, מבוכים צפופים עם מחסומים רבים, סצנות הכוללות מכשולים נעים ותצורות שצריכות להשתנות לצורות תלת-ממד מורכבות יותר כגון פריזמה משושה. בכל המקרים הללו, התצורה נשמרת יחד בתלת-ממד, נמנעת בבטחה ממכשולים סטטיים ונעים ומתאימה את גודלה בעת הצורך. הרובוטים פועלים לפי מסלולים חלקים ויעילים במקום להתפתל סביב מחסומים. בהשוואה לכמה שיטות תכנון פופולריות — כולל שדות פוטנציאליים קלאסיים ומשופרים, אופטימיזציית נחיל חלקיקים ובקרה חזויה מדגם ליניארי ולא ליניארי — הגישה החדשה מוצאת מסלולים שלרוב קצרים וחלקים יותר, צורכי אנרגיה נמוכים יותר, ובו בזמן מחשבת אותם מהר יותר מאשר טכניקות כבדות מבוססות-אופטימיזציה.
מה זה אומר למשימות בעולם האמיתי
עבור הקורא שאינו מומחה, המסר המרכזי הוא שהמאמר מראה כיצד לגרום לצוותים מעורבים של רובוטים מעופפים ונהגים לנוע כמו גוף גמיש אחד דרך מרחבי תלת-ממד צפופים. במקום לפרק תצורה בכל פעם שמופיעים מכשולים, הקבוצה יכולה להתכופף, להתכווץ ולהתמקד מחדש תוך כדי שמירה על שלמות ובטיחות. הדבר עשוי להתבטא בתמיכות רובוטיות מהירות ואמינות יותר במהלך אסונות, בבדיקות תעשייתיות ובסיורים ביטחוניים. בעוד העבודה הנוכחית מוצגת בסימולציות ומתבססת על רכב מוביל מיודע, המחברים מתארים צעדים עתידיים לעבר צוותים עמידים יותר לתקלות וניסויים במציאות, שמקרבים את החזון של נחילי רובוטים מתואמים קרקע-אוויר לפרקטיקה.
ציטוט: Chen, Q., Liu, X., Nie, W. et al. Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments. Sci Rep 16, 9127 (2026). https://doi.org/10.1038/s41598-026-37211-9
מילות מפתח: החזקה בתצורת מרובי-רובוטים, שיתוף פעולה בין UAV ו-UGV, הימנעות ממכשולים, תכנון תנועה, רובוטיקה נחילית