Clear Sky Science · he
שלד חיצוני לקטיעת עליונה לשליטה מרחוק עם פרמטריזציה רציפה של אורך הזרוע ותערובת אימפידנסים אדפטיבית מונעת-כוח
עבודה בטוחה מקרבה בטוחה
רבים מהמקצועות המסוכנים ביותר על פני כדור הארץ — ובחלל — עדיין דורשים שיקול דעת וכישוריות אנושיים. חשבו על תיקון מתקן גרעיני פגוע, טיפול בחומרי נפץ או ביצוע ייצוב בחללית. מחקר זה מציג סוג חדש של שלד חיצוני ממונע לזרוע עליונה שמאפשר לאדם לשלוט בזרוע רובוטית מרוחקת כאילו היא שלו, בזמן שנשאר מרוחק מפגיעה. ההתקן מתמקד בכך שהרובוט ינוע ו"יחוש" כהמשך טבעי של גוף המשתמש, גם כשמתאים עצמו לגדלים שונים של זרועות ולכוחות משתנים בסביבה.
מדוע זרועות מרחוק חשובות
רובוטים כבר פועלים מתחת למים, באזורים של אסונות ובתוך כורים, אך רובם מתוכנתים מראש או מונעים בעזרת ג'ויסטיקים פשוטים. זה מגביל את יכולתם כאשר התנאים משתנים פתאומית. מערכות טלופרציה — שבהן אדם שולט ברובוט מרוחק בזמן אמת — מציעות דרך אמצעית שמשלבת החלטת אדם עם כוח וטווח של רובוט. מערכות מוקדמות יכלו להזיז כלים, אך לעתים קרובות חסרו להן משוב מדויק על הכוחות ולא הייתה להן התאמה קלה למידות הגוף של משתמשים שונים. התוצאה הייתה תנועה מגושמת, "תחושה" לקויה ומאמץ נוסף הן על המפעיל והן על המכונה.
רובוט ללבישה שמתאים באמת
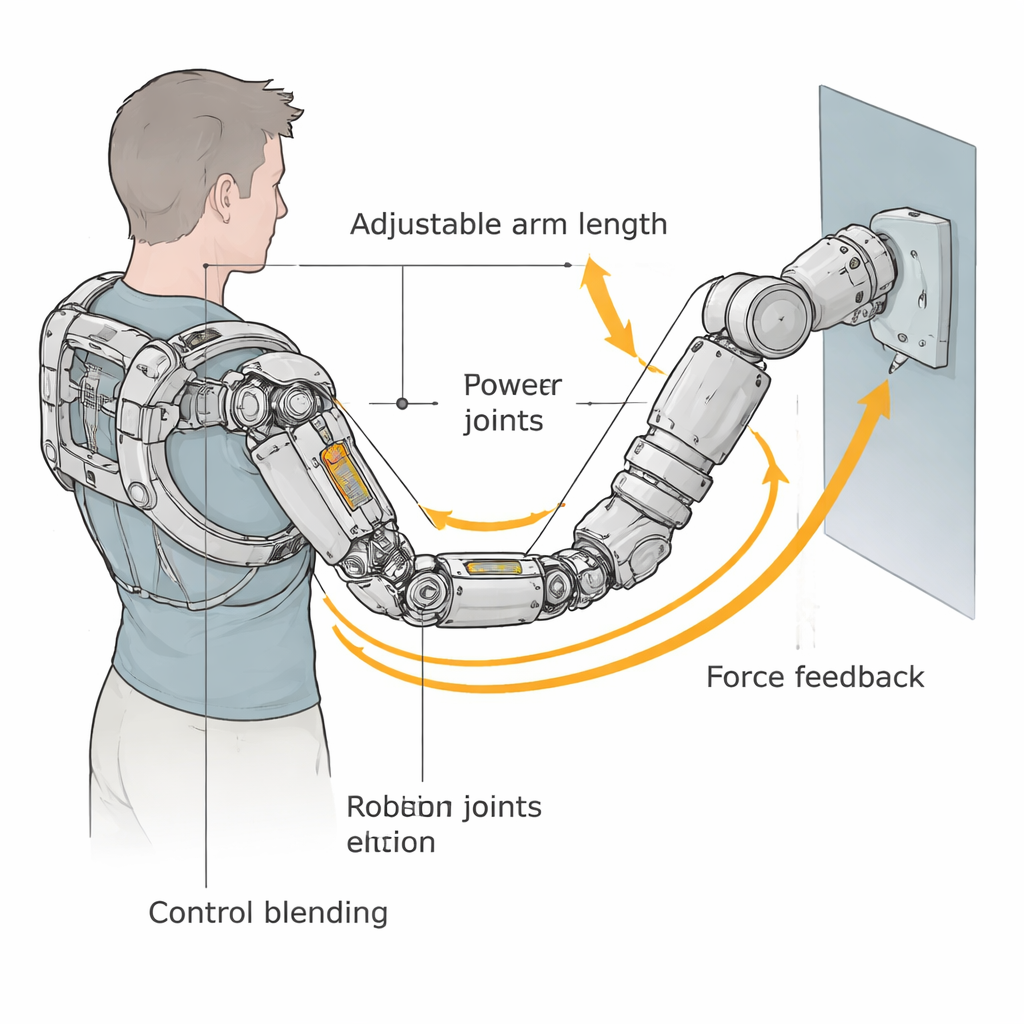
הצוות בנה שלד חיצוני לידי עליונה ללבישה עם שבעה מפרקים ממונעים שמתיישרים עם הכתף, המרפק והפרק. חומרים קלים כגון סיבי פחמן ואלומיניום שומרים על תגובתיות ההתקן במקום להפוך אותו לכבד ואיטי. חדשנות מרכזית היא שאורך הזרוע העליונה והאמה של השלד ניתן לכוונון בצורה חלקה, ולא בכמה מצבים קבועים. מסילות מחליקות עם חיישנים חשמליים מובנים מודדות ברצף את אורך זרועו של הלובש ומזינות מידע זה למודל גוף דיגיטלי. כתוצאה מכך ההתקן משנה באופן אוטומטי את הגיאומטריה הפנימית שלו לכל אדם, משפר נוחות והופך את תנועות הרובוט ליותר נאמנות לכוונות האדם. 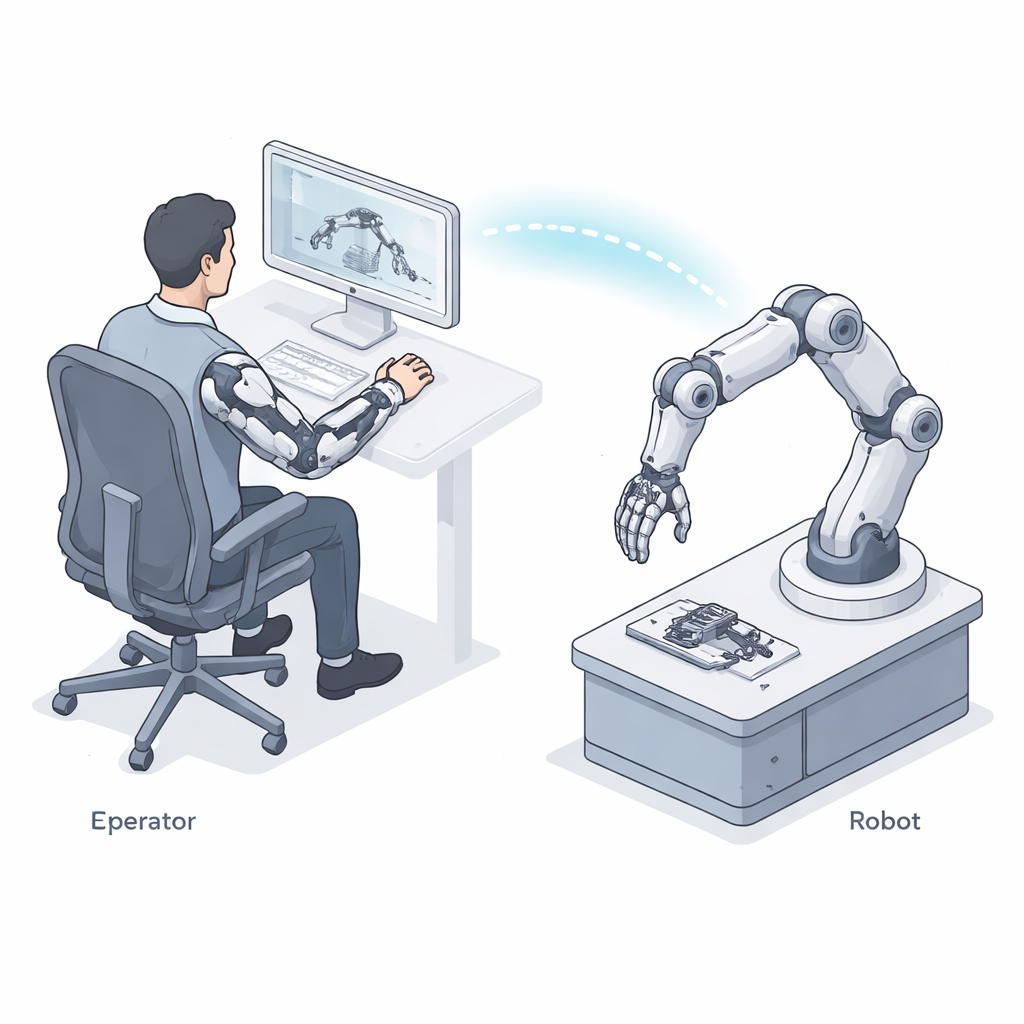
לנוע עם הגוף, לא נגדו
כתפיים אנושיות לא מסתובבות רק כצירים; עצם השכם גם מחליקה על החזה. רבים מהשלדים החיצוניים מתעלמים מזה ומסתיימים בלחימה בתנועה הטבעית, מה שיוצר אי־נוחות. העיצוב הזה מוסיף מודול פסיבי עם מספר דרגות חופש נוספות שעוקב בצורה שקטה אחרי השינויים הדקים של הכתף וגוף עליון, ומקל על הלחץ על העור והמפרקים. במקביל, המפרקים הממונעים מכויילים כך שהמומנט שלהם — כוח הסתובבות — נשאר מתחת לספים הבטוחים לרקמות האדם. מעצורים חירום וגלאי תקיעות משלימים את מאפייני הבטיחות, ומאפשרים למערכת להגיב במהירות אם משהו משתבש.
דרך חכמה יותר לחוש מגע
מעבר למכניקה, המחברים מתמקדים במה שהלובש מרגיש. כאשר הרובוט המרוחק נוגע או דוחף משהו — קיר, ידית כלי או עצם אחר — הכוחות הללו מתורגמים חזרה דרך השלד כך שהמשתמש חש בהתנגדות. מערכת הבקרה מערבבת שתי צרכים שבדרך כלל מתנגשים: מעקב מדויק אחר תנועות המפעיל והתנהגות רכה וציותית כאשר כוחות המגע גדלים. בעומסים נמוכים המערכת פועלת נוקשה ומדויקת, ועוקבת בקפידה אחרי מסלול זרוע הלובש. ככל שהכוחות עולים מעבר לסף בטיחות, הבקרה מתרככת אוטומטית, מאפשרת מעט אילוץ כך שההתנגשויות מתרככות במקום להיות זעזועיות. המחברים משתמשים בכלים מתמטיים מבוססי אנרגיה כדי להראות שהתנהגות תערובתית זו נשמרת יציבה ולא מסתחררת לתנודות.
מבחן המערכת במציאות
כדי להעריך את השלד, החוקרים חיברו אותו לזרוע רובוטית תעשייתית נפוצה. כאשר אדם שלובש את השלד עקב מסלול של שמונה־צורת באוויר, הרובוט המרוחק שיחזר את התנועה מקרוב, למרות השיהויים הקטנים בתקשורת. ניסויים נוספים בדקו עד כמה חיישני אורך הזרוע עבדו: קריאות מתח מהחיישנים המחליקים התאימו למדידות פיזיות בשגיאות של פחות ממספר מילימטרים, גם לאחר הלבשה והסרה חוזרת. בסימולציות מבוקרות שבהן הרובוט לחץ כנגד קיר קשיח וירטואלי, סכימת הבקרה המלאה הפחיתה פיקות כוחות מגע בכמעט 70 אחוזים בהשוואה להגדרה בסיסית, תוך שמירה רבה על דיוק המעקב בתנועה חופשית.
מה המשמעות לעבודה וטיפול בעולם האמיתי
במונחים יומיומיים, המחקר הזה מקרב אותנו לרובוטים מרוחקים שמרגישים טבעיים ובטוחים לשליטה כמו להזיז את הזרוע של עצמנו. על ידי שילוב מסגרת מתכווננת שמחבקת את הגוף, מעקב מדוקדק אחר תנועת האדם ומשוב כוח חכם שמסתגל בזמן אמת, המערכת מבטיחה טלופרציה מדויקת ופחות מעייפת בסביבות מסוכנות. אותה טכנולוגיה גם עשויה לשמש מטופלים המתאוששים משבץ, ולאפשר לפיזיותרפיסטים להנחות ולהקליט תנועות זרוע בעוד המטופלים מקבלים סיוע ומשוב דמויי־חיים. ככל שגרסאות עתידיות ישלבו אותות מהשרירים וממעקב מבט, ולמדו מניסיון, זוגות של שלד־חיצוני ורובוט עשויים להפוך לכלים רב־תכליתיים הן למשימות קיצוניות והן לשיקום יומיומי.
ציטוט: Zeng, P., Xu, Y., Zheng, S. et al. An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending. Sci Rep 16, 7529 (2026). https://doi.org/10.1038/s41598-026-37205-7
מילות מפתח: שלד חיצוני לשלט רחוק, בקרת זרוע רובוטית, משוב כוחות, רובוטיקה שיקומית, פעולות מרחוק בסכנות