Clear Sky Science · he
YOLO-DC לזיהוי כלי רכב באמצעות רשתות קונבולוציה מטופלות ותשומת לב קואורדינטית חוצת‑ערוצים
מדוע גילוי רכבים ממצלמות באמת חשוב
ערים מודרניות מסתמכות על מצלמות שמפקחות על כבישים הומים, מסייעות בניהול עומסי תנועה ומכינות את הקרקע לרכבים אוטונומיים. עם זאת, זיהוי אמין של כל כלי הרכב בזרמי הווידיאו הוא אתגר מפתיע — במיוחד כאשר מכוניות קטנות במרחק, מוסתרות בחוסר סדר תנועה, או מטושטשות על‑ידי גשם, ערפול או חשכה. מאמר זה מציג את YOLO‑DC, מערכת ראייה ממוחשבת חדשה שמטרתה לזהות מכוניות, אוטובוסים וכלי רכב אחרים במהירות ובדייקנות, גם בתנאים אמיתיים מבולגנים ובמכשירים עם כוח חישוב מוגבל.
בעיית התנועה שעומדת מאחורי המחקר
ערים גדלות מתמודדות עם כבישים פקוקים, תאונות גוברות ופליטות מזהמים. מערכות תחבורה חכמה מבטיחות סיוע על‑ידי ניטור תנועה בזמן אמת והכוונת נהגים בני אדם ואוטונומיים. המרכיב המרכזי הוא זיהוי כלי רכב מהיר ואמין בווידאו. אלגוריתמים ישנים מסוג "שתי‑השלבים" סורקים תמונות במעבר כפול ויכולים להיות מדויקים מאוד, אך לעתים קרובות איטיים מדי לשימוש בזמן אמת במצלמות שעומדות לצד הדרך או ברכבים. מערכות חד‑שלב חדשות, כמו משפחת YOLO ("You Only Look Once"), מקריבות קצת מורכבות בתמורה למהירות רבה יותר, מה שהופך אותן לפופולריות בפועל. עם זאת, הן עדיין מתקשות עם כלי רכב קטנים, חופפים ובתנאי מזג אוויר קשים שמסתירים פרטים. YOLO‑DC בונה על דגם YOLOv8 העדכני ומעצב מחדש את השכבות הפנימיות שלו כדי להתמודד טוב יותר עם אתגרים אלה.
כיצד YOLO‑DC רואה יותר באמצעות מיקוד חכם יותר
בלב YOLO‑DC נמצא רשת "שלד" (backbone) משודרגת — החלק אשר מעבד תחילה תמונות גולמיות לתכונות מופשטות. המחברים מציעים מנגנון שנקרא תשומת לב קואורדינטית חוצת‑ערוצים, שלמעשה מלמד את הרשת לא רק איפה להתמקד בתמונה אלא גם אילו סוגי תבניות חזותיות ראויות למשקל רב יותר. בשילוב עם קונבולוציות מטופלות (deformable convolutions) — מסננים שיכולים לכופף את דפוס הדגימה שלהם כדי לעקוב אחרי כלי רכב משופעים או בצורות בלתי רגילות — השלד הזה יכול להסתגל טוב יותר לרכבים הנראים בזוויות, בגדלים ובמיקומים שונים. במקום לטפל בכל חתיכת כביש באותה הצורה, המערכת לומדת להדגיש קווי מתאר ומרקמים מזהים שמבדילים כלי רכב אמיתיים מבניינים, עצים או סימוני דרך.
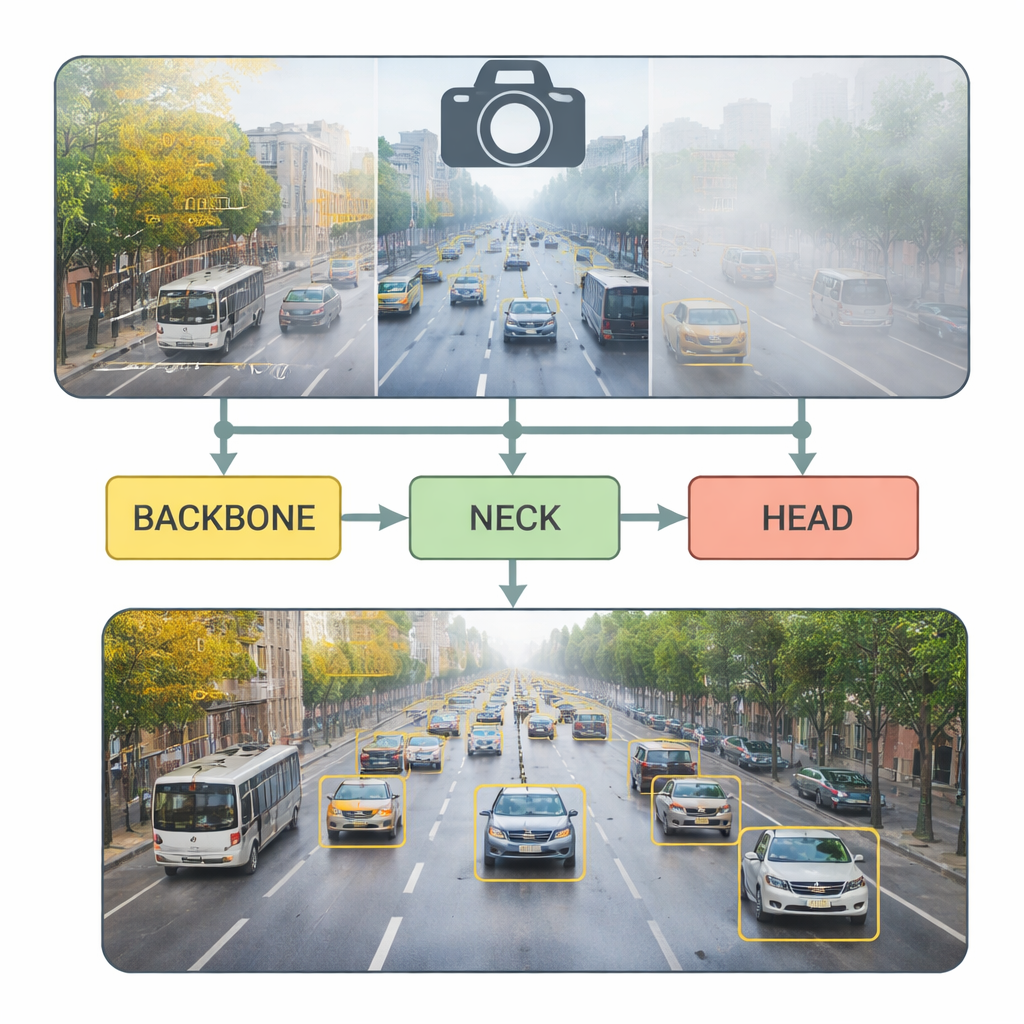
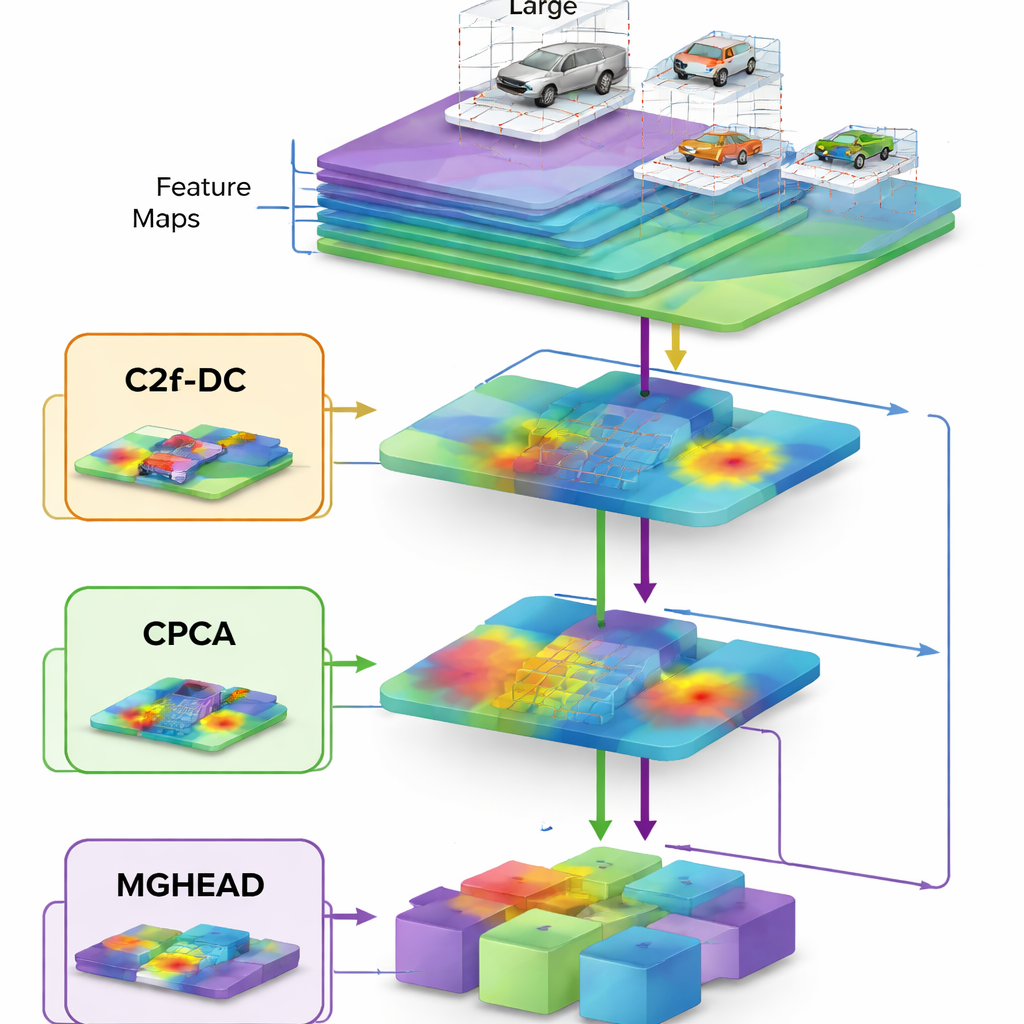
לכידת כלי רכב קטנים ורחוקים מבלי להאט
החלק האמצעי של המודל, המכונה צווארון (neck), אחראי למיזוג מידע מנקודות מבט גסות וממוקדות. YOLO‑DC משדרג שלב זה בשתי דרכים. ראשית, מודול תשומת לב מקדימות ערוצית (channel prior attention) מסייע לרשת לדכא רעש ולהבליט רמזים עדינים מכלי רכב קטנים ורחוקים במסגרת. שנית, גוש מעוצב בהשראת ארכיטקטורת FasterNet הקלות חותך במספר הפעולות על‑ידי יישום קונבולוציות מלאות רק על חלק מהנתונים ואז ערבובן ביעילות. עיצוב מחושב זה מצמצם הן את מספר הפרמטרים והן את תעבורת הזיכרון, ומאפשר למודל לפעול מהר יותר תוך שיפור הדיוק — צירוף נדיר אך מבוקש מאוד למכשירי קצה כמו מצלמות תנועה ומחשבים ברכבים.
זיהוי כלי רכב בגדלים שונים ובתנאי מזג אוויר קשים
השלב הסופי, או הראש, מחליט היכן נמצאים העצמים ומה הם. YOLO‑DC מציג כאן קונבולוציות מקובצות רב‑קנה מידה (multi‑scale grouped convolutions), שמחלקות את מפת התכונות למספר קבוצות ערוצים שכל אחת מהן משתמשת בגודל מסנן שונה לפני שמוחזרות לאיחוד. זה מעניק לגלאי תחושת קנה מידה עשירה יותר, כך שיוכל לזהות אוטובוסים ענקיים שממלאים את המסגרת, משאיות בגודל בינוני ומכוניות זעירות בקצה המרוחק בו זמנית. בניסויים נרחבים על מאגר UA‑DETRAC, הכולל סצנות כביש בענני, שמש, גשם ולילות, YOLO‑DC השיג דיוק שווה או גבוה יותר מזה של גלאים מהשורה הראשונה בעודו משתמש רק בשבר ממחושביהם ורץ במאות פריימים לשנייה על חומרה מודרנית. במאגר DAWN, שנבנה במיוחד לערפל, גשם, שלג וסופות חול, הדגם החדש העניק רווחים ניכרים במיוחד בגשם כבד ובערפל דחוס — מצבים שבהם מערכות מסורתיות נכשלות לעתים קרובות.
מה משמעות התוצאות עבור הכבישים היומיומיים
עבור קהל לא מומחה, המסר המרכזי הוא ש‑YOLO‑DC טוב יותר ב"ראיית" תנועה אמיתית כפי שהיא נראית בפועל: צפופה, מבולגנת ולעתים מוסתרת על‑ידי מזג אוויר גרוע או תאורה לקויה. על‑ידי שילוב מסננים גמישים שמדלגים לפי צורת הרכב עם מנגנוני תשומת לב שממוקדים באזורים המידעיים ביותר, המערכת מזהה יותר כלי רכב, מפספסת פחות ורצה במהירות מספקת לניתוח וידאו חי בחומרה צנועה. זה הופך אותה לגורם מבטיח בניהול תנועה חכם, במעקב תאונות אמין יותר ובנהיגה אוטונומית בטוחה יותר — וכל זאת תוך שמירה על עלויות עיבוד נמוכות מספיק לפריסה נרחבת ברחובות הערים וברכבים העתידיים.
ציטוט: Liu, Z., Zhu, M., Gao, B. et al. YOLO-DC for vehicle detection using deformable convolutional networks and cross-channel coordinate attention. Sci Rep 16, 6284 (2026). https://doi.org/10.1038/s41598-026-37094-w
מילות מפתח: זיהוי כלי רכב, תחבורה חכמה, YOLO, תנאי מזג אוויר קשים, ראייה בזמן אמת