Clear Sky Science · he
בקר PID מהיר וממוטב לשיפור מעקב המהירות ודחיית הפרעות לטורבינת גז באמצעות circle‑SCA‑BSO משופר
מדוע טורבינות מהירות ויציבות חשובות
בכל פעם שמפעל כוח מעלה תפוקה כדי לענות על הביקוש בערב, או שמנוע סילון מגדיל עוצמה להמראה, טורבינת גז צריכה לשנות מהירות במהירות ובבטחה. אם מערכת הבקרה מגיבה באטיות או חרגה מהמטרה, התוצאה עלולה להיות בזבוז דלק, פליטות מוגברות ואפילו נזק. מאמר זה בוחן דרך חדשה לכיול אוטומטי של סוג נפוץ של בקר מהירות תעשייתי, כך שטורבינות גז יוכלו להגיב מהר יותר, לשמור על מהירות יציבה יותר ולהתנגד טוב יותר להפרעות בתפעול העולם האמיתי.
להשיג שליטה בהתנהגות הטורבינה
לפני שניתן לשלוט טוב בטורבינת גז, צריך ייצוג דיגיטלי אמין של ההתנהגות שלה. המחברים בונים תחילה ייצוג כזה — מודל דינמי — באמצעות סוג של רשת עצבית שלומדת כיצד מהירות הטורבינה וטמפרטורת הפליטה מגיבות לקלטים כגון זרימת דלק, טמפרטורת כניסה וזווית להבי ההנחיה. הם מאמנים את המודל על נתונים מטורבינה אמיתית שמופעלת מהצתה ועד מהירות מלאה ללא עומס, ומנרמלים ובודקים את הנתונים בקפידה כדי שהמודל לא יזכור רק סט תנאים יחיד. המודל המתקבל חוזה את התנהגות הטורבינה בדיוק של למעלה מ‑99.9%, מה שהופך אותו לסביבת ניסוי אמינה לנסיונות ולכייל שיטות בקרה חדשות. 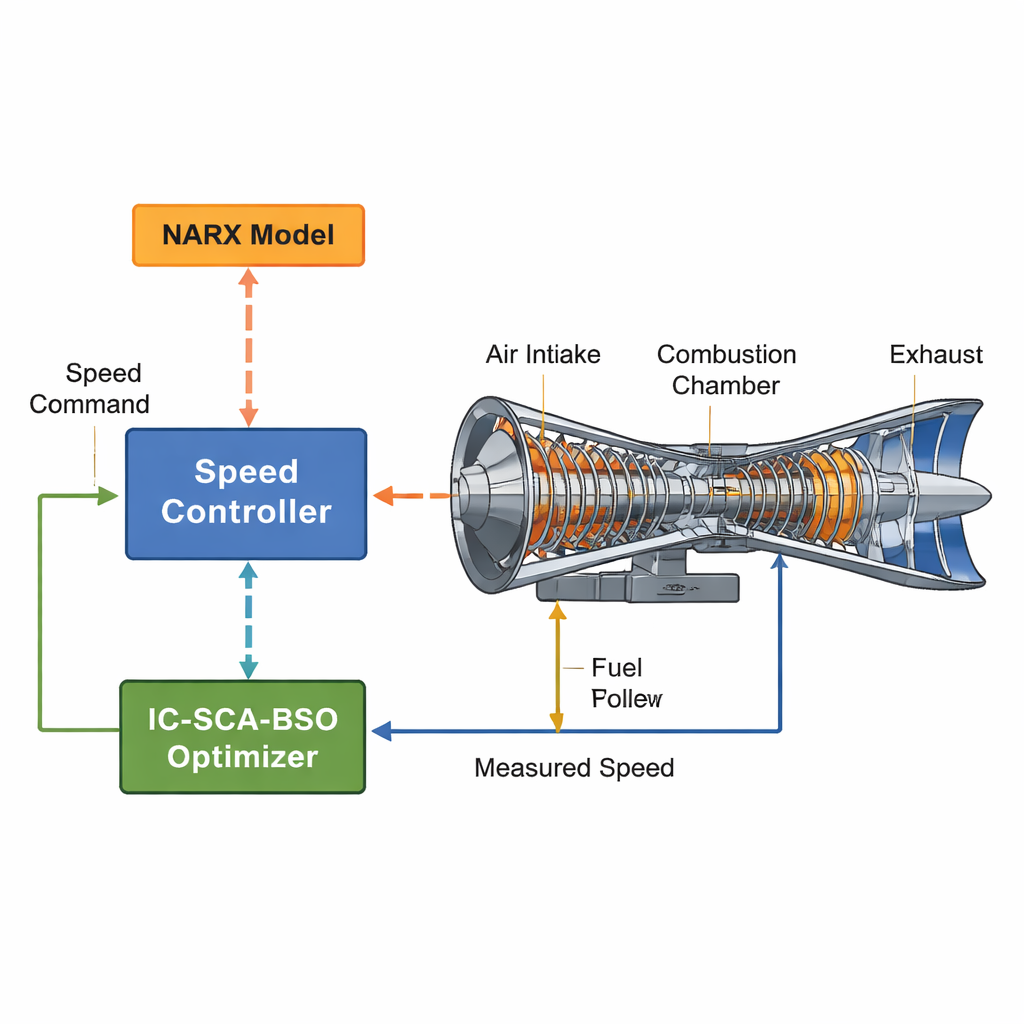
מדוע עדיין קשה לכייל בקרי נפוץ
בתעשייה, העבודה הקשה של בקרה אוטומטית נעשית על ידי בקר PID, שמכוון פלט — במקרה זה זרימת דלק — על סמך המרחק, הזמן והמהירות שבהם מהירות הטורבינה שונה מהמטרה. יחידות PID פשוטות ומהימנות, אך בחירת שלושת הפרמטרים המרכזיים שלהן היא משימה ידועה כקשה. באופן מסורתי מהנדסים מיומנים מכוונים ערכים אלה ידנית, תהליך איטי וקשה לשחזור. קבוצות מחקר רבות משתמשות כיום באלגוריתמי חיפוש בהשראת הטבע — כמו מושבות ציפורים או חרקים — כדי למצוא אוטומטית הגדרות PID טובות יותר, אך שיטות אלו עלולות להיתקע בפתרונות מקומיים או לקחת זמן רב מדי להסתגלות.
מושבה חכמה יותר לכיול אוטומטי
המחברים מציגים אסטרטגיית חיפוש משופרת בשם IC‑SCA‑BSO, שמשלבת ומשכללת כמה רעיונות בהשראת מושבות. תחילה היא מפזרת "חיפושיות" וירטואליות (פתרונות מועמדים) באופן אחיד ברחבי מרחב החיפוש באמצעות דפוס מעגלי, במקום לפזרן באקראי. לאחר מכן היא מתאמת את מידת החקירה של המושבה לאורך הזמן, באמצעות עקומה מעוצבת בקפידה במקום דעיכה ליניארית פשוטה. לבסוף היא שואלת שלבים קצביים מתוך שיטה המבוססת על סינוס וקוסינוס כדי למנוע מהחיפושיות לשקוע מוקדם מדי במקסמות מקומיות. יחד, הצעדים האלה מאפשרים לאלגוריתם לחפש באופן נרחב בתחילה ואז למקד בצורה חלקה את השילוב הטוב ביותר של פרמטרי PID, שמוערך לפי גודל ואורך טעות המהירות לאורך זמן.
מבחן לבקר החדש
באמצעות מודל הטורבינה שהוכן ברשת עצבית ופלטפורמת סימולציה סטנדרטית, החוקרים משווים חמש גרסאות של בקר מהירות: בסיס מכויל ידנית וארבעה בקרי PID מכוילים אוטומטית על בסיס שיטות מושבה שונות. הם מעריכים כל אחת על פי מהירות ההגעה לפקודות מהירות חדשות, גודל החריגה מהמטרה, יציבות לאחר התייצבות וכמה טוב היא מתאוששת ממכת דלק פתאומית של 5% המדמה הפרעה תפעולית אמיתית. לאורך שלושה שינויים בפקודות המהירות ובמבחן ההפרעה, הבקר המכויל על‑ידי IC‑SCA‑BSO הגיע בעקביות למהירות המבוקשת מהר יותר, החריג פחות והסתדר בצורה מרגיעה יותר מאחרים — וכל זאת ללא דרישה למשאבי חישוב נוספים. 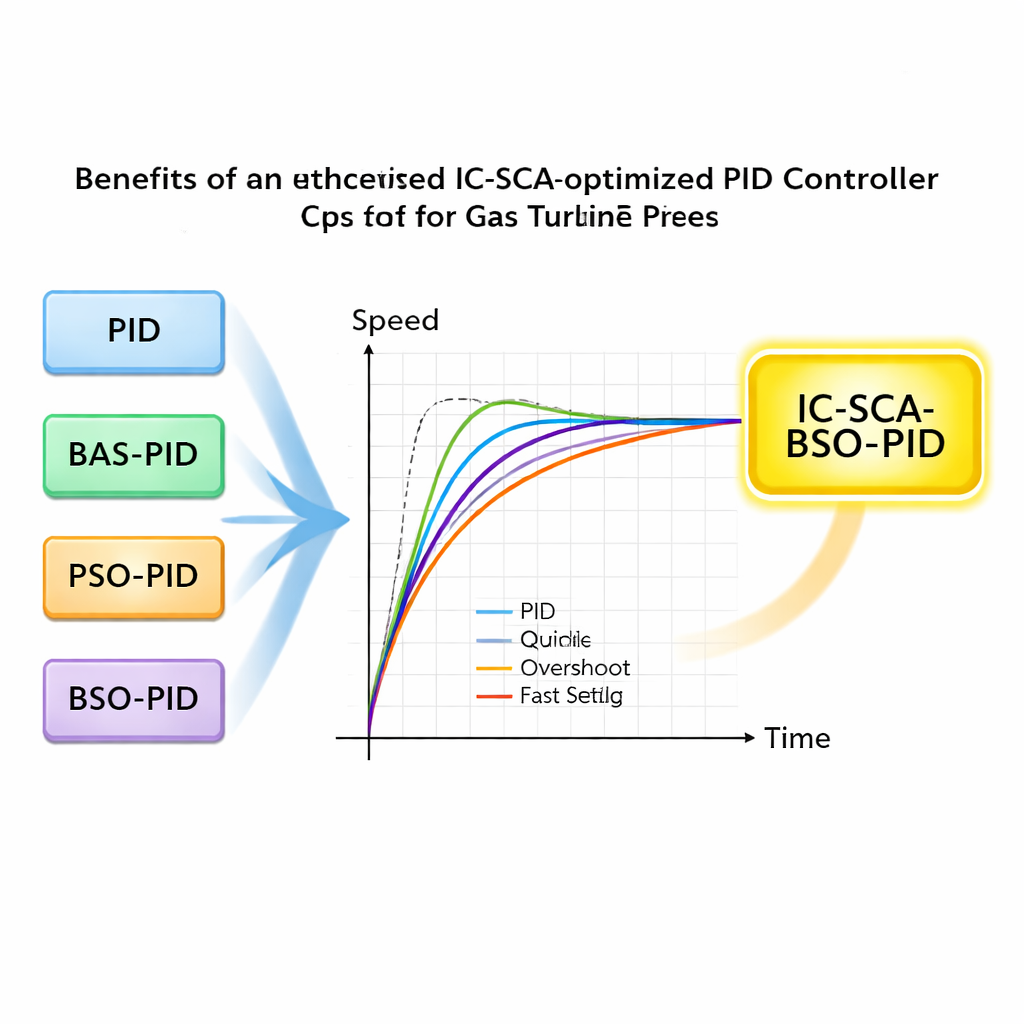
מה זה אומר לטורבינות אמיתיות
במונחים פשוטים, המחקר מראה שדרך חכמה יותר של "כיוונון אוטומטי" של בקר סטנדרטי מוכר בתעשייה יכולה לגרום לטורבינות גז להגיב יותר כמו נהג מאומן מאשר לטירון עצבני: זינוק מהיר, התייצבות חלקה למהירות שיוט ויציבות כשנדרדרים התנאים. בעוד שההגדרות המדויקות שהם מצאו חלות על טורבינה וטווח פעולה מסוימים, הגישה — חיבור של מודל מדויק שנלמד יחד עם אלגוריתם חיפוש משופר — מציעה מפת דרכים למהנדסי תחנות לייעול עבודת הניסיון והטעות, צמצום צריכת דלק ופליטות, והפיכת מערכות כוח ותדלק להיענות יותר ולחסינות גבוהה יותר.
ציטוט: Dong, Y., Liu, X., Wang, Z. et al. Improved circle-SCA-BSO optimized gas turbine speed PID controller for enhanced speed tracking and interference rejection. Sci Rep 16, 5871 (2026). https://doi.org/10.1038/s41598-026-37087-9
מילות מפתח: בקרת טורבינת גז, כיול PID, אופטימיזציית מושבות, מודל רשת עצבית, אוטומציה תעשייתית