Clear Sky Science · he
שרשרת דינמית לתיזמון מערכות מרובות AGV עם פרופיל תנועה מושפע-מטען
מדוע רובוטי מחסן זקוקים לתזמון טוב יותר
קניות מקוונות מילאו את המחסנים במוצרים שצריך להזיז במהירות, בבטחה וללא הפסקה. מתקנים רבים מסתמכים כיום על צי של רובוטי רצפה — רכבים מונחים אוטומטית (AGV) — לשינוע מדפים ובלטות. אבל אם מתזמנים את הרובוטים בהנחות מפושטות לגבי האופן שבו הם נעים, הם עלולים לבזבז זמן, להזיז חבילות שבירות או אפילו לסכן התנגשות. מאמר זה מציג דרך חדשה לתכנן ולתאם בו־זמנית מספר רב של AGV על ידי התחשבות בהתנהגות הפיזית האמיתית שלהם, מה שמבטיח תנועה חלקה יותר וטיפול בטוח יותר במטען במחסנים עמוסים.
רובוטים שמזיזים סחורה, לא רק מספרים
AGV מודרניים כבר נעים ברחבי מחסנים, נמלי תעופה ומפעלים, מושכים עגלות או מרימים מדפים ובלטות. רוב התוכנה הקיימת שמנהלת צי כזה פועלת ברמה גבוהה: היא קובעת איזה רובוט יבצע איזו משימה וכיצד הוא ייסע בקווים כלליים. כדי לפשט את המתמטיקה היא נוטה להניח שזמן הנסיעה בין שתי נקודות הוא קבוע, ומתעלמת מכמה מהר הרובוט יכול להאיץ או להאט, או כמה כבד המטען שלו. המחברים מראים שקיצור דרך זה יוצר בעיות בבניינים אמיתיים. רובוטים עלולים להגיע לצמתים מוקדם או מאוחר מהצפוי, מה שמגביר את הסיכוי לשיבושים, כמעט-התנגשויות או בלימות פתאומיות שמרעידות את מה שהם נושאים.
הוספת פיזיקה אמיתית ללוח הזמנים
החוקרים מטפלים בפער הזה בגישה דו-שלבית שמשלבת פיזיקה ותזמון. ראשית, הם מפתחים אומדן זמן נסיעה דינמי ל-AGV, הנקרא DTT-AGV. במקום לטפל במסדרון כבלוק של זמן אחד, DTT-AGV חותך כל מהלך לשלבים: האצה, שיוט במהירות קבועה, והאטה. הוא משתמש במודל מכני פשוט של AGV הנושא מדף, שבו המדף מתנהג כמו מסת מחוברת באמצעות קפיצים ודמפרים. מודל זה לוכד כיצד האצה והאטה יכולות לגרום להנדנוד או רטט של המטען. מתוך כך האלגוריתם מחשב באיזו מהירות הרכב יכול לנוע בבטחה עבור מרחק ומטען נתונים מבלי לעבור גבולות של מהירות, כוח או רטט, ומחזיר זמן נסיעה ריאליסטי לכל מקטע בדרך.
מניעת מפגש אף מול אף בין רובוטים
שנית, הצוות מציג שיטת שרשור זמן הגעה, ATC-AGV, שמקשרת בין מספר רובוטים על מסלולים משותפים. לאחר ש-DTT-AGV מעריך כמה כל מקטע ידרוש זמן, ATC-AGV קובעת זמני הגעה ויציאה מדויקים בכל צומת — צמתים, סיבובים או נקודות העברה — לאורך מסלול כל רובוט. היא בונה "שרשרת" זמן בכל צומת משותפת, ומבטיחה מרווח בטיחות בין כלי הרכב תוך התחשבות במצבים הנוכחיים של הרובוטים, כגון האם הם עמוסים, בטעינה או בסיבוב. אם תכנון חדש יגרום לשני AGV להימצא באותו צומת קרוב מדי בזמן, ATC-AGV מזיזה במקצת את לוח הזמנים של אחד הרובוטים כדי לשחזר את רווח הביטחון. למעשה, היא הופכת את רשת הרצפה של המחסן למפה בעלת מודעות-זמן שעוזרת למנוע התנגשות לפני שהיא מתרחשת.
בדיקות לתנועה חלקה ונסיעה עדינה יותר
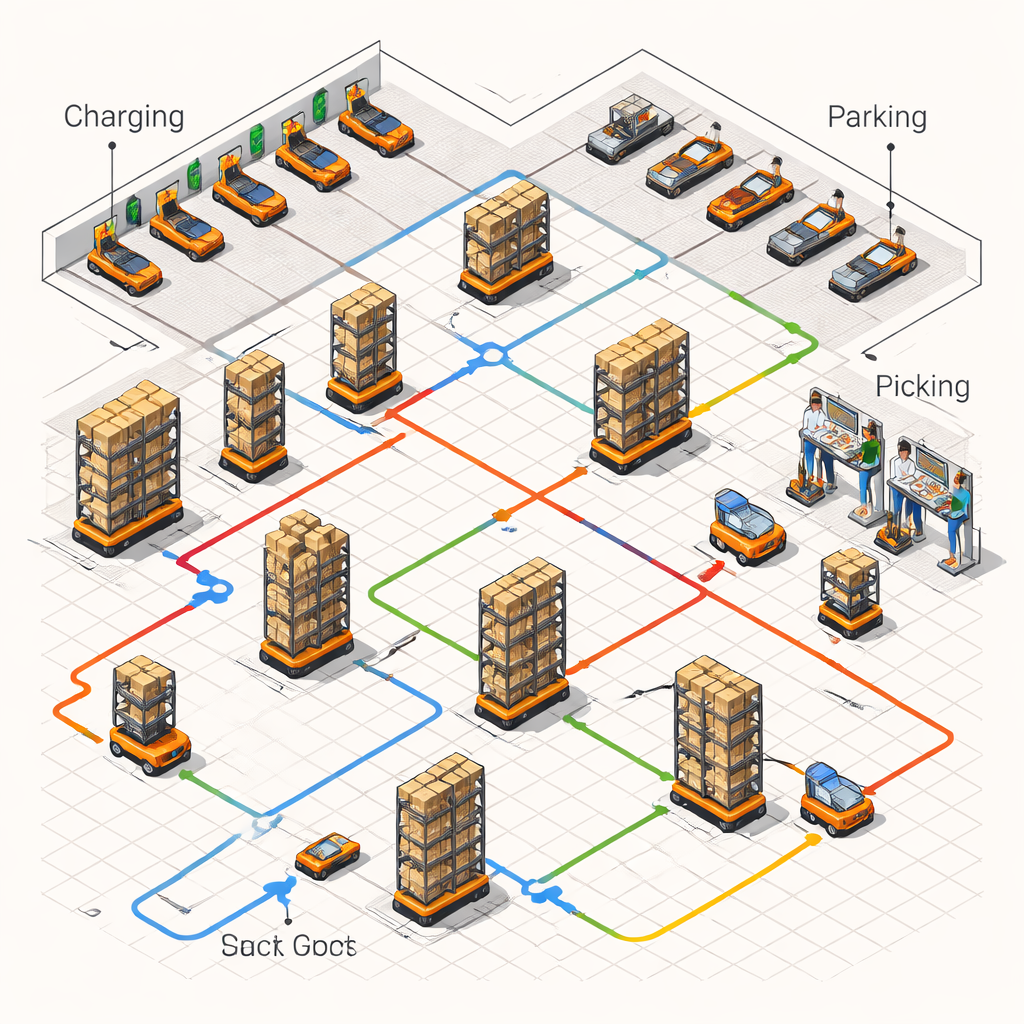
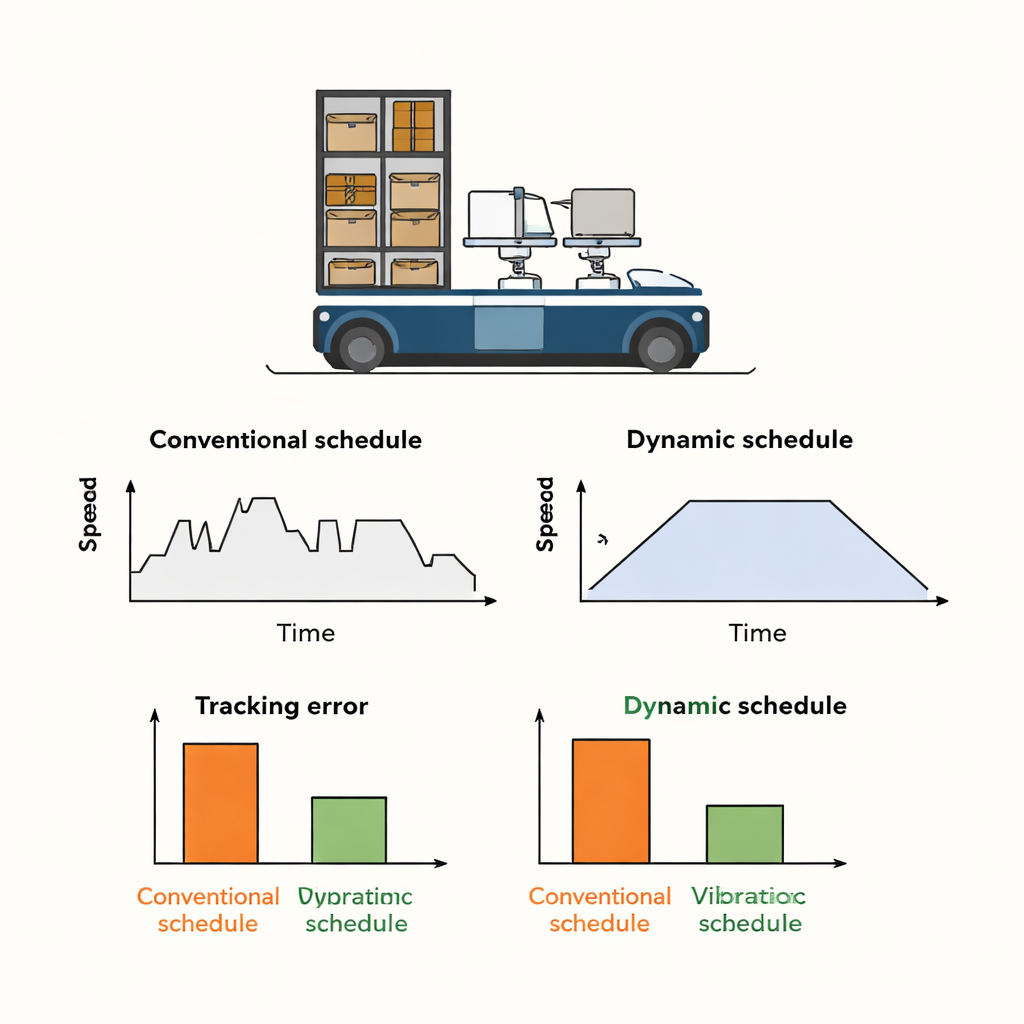
כדי לבדוק את הרעיונות שלהם, המחברים מדמים AGV במחסן בסגנון רשת לחצה־וברח שכולל אזורי טעינה, מקומות חניה ואזורים למדפים. הם משווים את המתכנן שלהם לשיטה מקובלת המניחה מהירות כמעט קבועה ומתעלמת משלבי תנועה מפורטים. באחת הבדיקות רובוט נוסע לאורך מסלול בצורת L ואז פונה ב-90 מעלות. הגישה המסורתית יוצרת שינויים חדים במהירות בפינה, שלא ניתן לעקוב אחריהם באופן מושלם על ידי הרובוט האמיתי. התוצאה היא שגיאות מעקב גדולות — הבדלים בין המקום שבו הרובוט אמור להיות ובין המקום שבו הוא באמת נמצא — ונתקי זמן משמעותיים בנקודות מפתח. עם המתכנן החדש, המסלול מתחלק לשלבי האצה, שיוט ובלימה ברורים. הרובוט המדומה עוקב כעת אחרי נתיב היעד באופן צמוד יותר, עם שגיאות קטנות בהרבה וסיבובים חלקים יותר.
עדין יותר על חבילות ועמיד לעתיד
מערך הבדיקות השני מתמקד בהתנהגות המטען עצמו. כאשר משתמשים בלוח הזמנים המקובל, בסיס הרובוט חווה זעזועים פתאומיים באצה שמעוררים את התנהגות הקפיץ של המדף, וגורמים לרעידות חזקות במטען. בתזמון דינמי, המודע למטען, התאוצויות נשארות בתחום צר יותר ומשתנות בעדינות רבה יותר. במידות על פני זמן, גם השיא וגם הרטט הממוצע של המטען יורדים בחדות — דבר קריטי לפריטים שבירים, מסודרים בערימות או לא יציבים. המחברים גם בוחנים כיצד גורמים מוזנחים כמו חיכוך גלגל-רצפה עשויים להשפיע על האומדנים שלהם ומגלים שבתנאי מחסן טיפוסיים שגיאת התזמון הנוספת נשארת בתוך ריפודי הבטיחות שנבנו באלגוריתם שלהם.
מה משמעות הדבר למחסנים אמיתיים
במונחים פשוטים, עבודה זו מלמדת מתזמנים של AGV לכבד את תנועת המכונות שהם שולטים בה. על ידי בסיס זמנים ויחסי זכות-דרך על האופן שבו רובוטים באמת יכולים להאיץ, להאט ולשאת מטענים שונים מבלי לקרוע או לרעוד אותם, המסגרת המוצעת מצמצמת שגיאות במעקב אחרי נתיבים, מורידה רעידות מטען ומפחיתה את הסיכון לקונפליקטים בצמתים. עבור מפעילי מחסנים ויצרנים, זה מתבטא בתנועה חלקה יותר, טיפול בטוח יותר במוצרים ובתשתית שניתן להרחיב ככל שהצי גדל והפריסות נעשות מורכבות יותר.
ציטוט: Nguyen, T.P., Nguyen, H., Phan, D.M. et al. Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling. Sci Rep 16, 6832 (2026). https://doi.org/10.1038/s41598-026-37083-z
מילות מפתח: רכבים מונחים אוטומטית, רובוטיקה למחסנים, תזמון ללא התנגשות, תכנון תנועה, לוגיסטיקה חכמה