Clear Sky Science · he
3D LineExplore: שיטת חיפוש קווים תלת‑ממדית לניתוב גאומטרי במעגלים מודפסים רב‑שכבתי
חיווט חכם ללוחות המעגלים שבתוך כל דבר
כל סמארטפון, מחשב נייד ורכב מכילים כיום כבישים זעירים של נחושת שמסיעים אותות בין השבבים. ככל שהאלקטרוניקה דוחסת יותר רכיבים במרחב קטן יותר, שרטוט "הדרכים" המיקרוסקופיות האלה על לוחות מעגל מודפסים (PCBs) הפך לאחת המשימות הקשות ביותר בתכנון חומרה. מאמר זה מציג דרך חדשה לתכנן באופן אוטומטי את המסלולים האלה בתלת־ממד, בהבטחה לעיצוב מהיר יותר, פחות שגיאות וביצועים טובים יותר למכשירים שבו אנו עושים שימוש יום‑יומי.
מדוע הניתוב המסורתי נתקל בקיר
מרבית המנתבים האוטומטיים של PCB כיום חושבים במונחים של לוח שחמט: הלוח מחולק לריבועים זעירים, ואלגוריתמים כמו A* מחפשים את המסלול הזול ביותר בין פין לפין. השיטה עובדת, אך יש לה פשרות. אם הרשת גסה, המסלולים אינם מדויקים ועשויים להפר את כללי התכנון. אם הרשת צפופה מאוד, החיפוש מתפוצץ בגודלו והופך לאיטי במיוחד, בעיקר על לוחות רב‑שכבתיים שבהם ניתן לעבור בין שכבות דרך חורים מקדחים זעירים בשם ויאות. שיטות ללא רשת מתרחקות מהרשת המלאכותית ועובדות ישירות עם צורות, אבל עד כה הן היו מוגבלות בעיקר לפריסות שטוחות בת שתי־ממדים ומתקשות לטפל ביעילות בניתוב תלת‑ממדי אמיתי רב‑שכבתי.
"רדאר" תלת‑ממדי למציאת מסלולים בטוחים
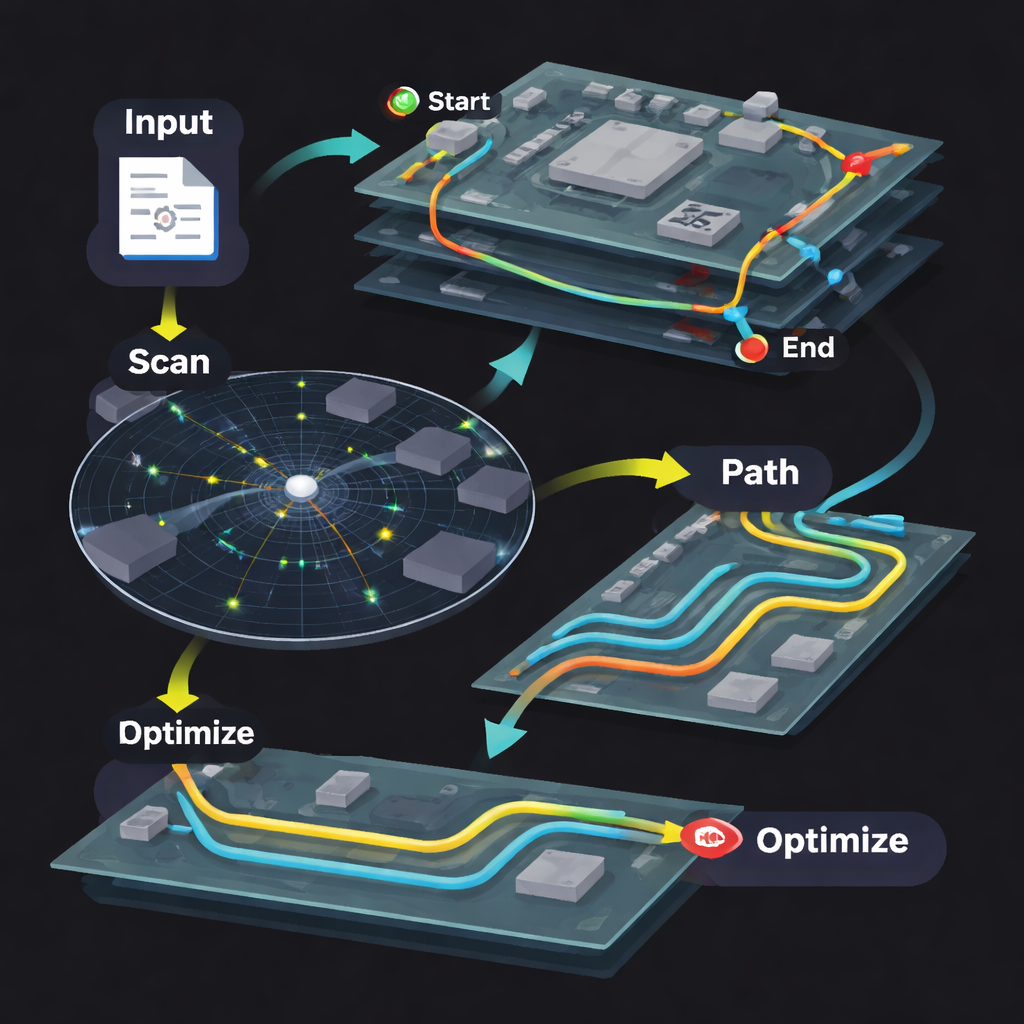
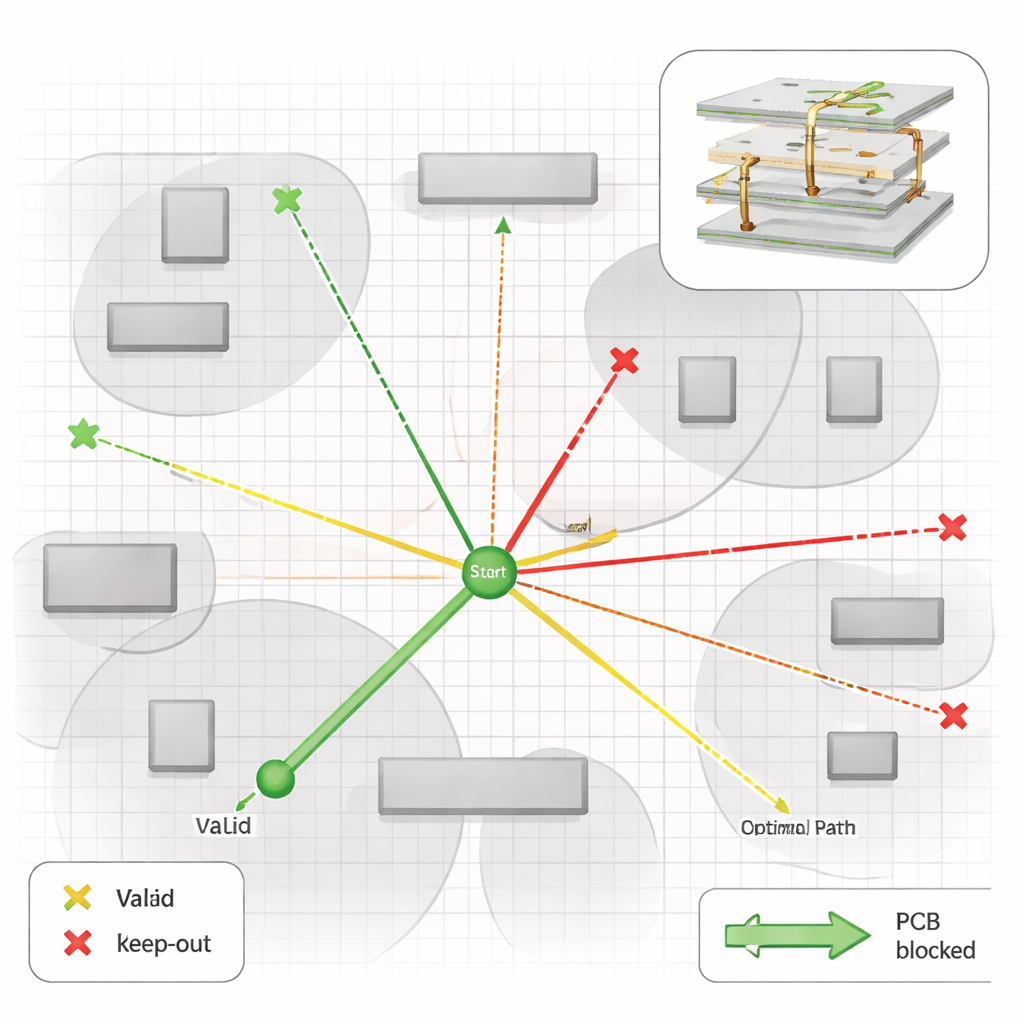
המחברים מציגים את 3D LineExplore, שיטת ניתוב ללא רשת שפועלת ישירות במרחב רציף על פני שכבות מרובות. בליבה יש אלגוריתם סריקה בהשראת "רדאר". במקום לבדוק כל תא ברשת, השיטה מסתכלת סביב הנקודה הנוכחית בשכונה מקומית, מזהה מכשולים קרובים כגון רכיבים וחוטים כבר מונחים, ואוספת נקודות־פינה מייצגות מהצורות הללו. מהנקודות הללו היא מציעה קבוצת "נקודות חקירה" קומפקטית ומבטיחה שבהן ניתן למקם מסלול בטוח. אם השכונה המיידית אינה מספקת מסלול, רדיוס הסריקה מתרחב — אך רק במידת הצורך. בדיקה סלקטיבית זו שומרת על ריכוז החיפוש, נמנעת מבדיקות מיותרות ומתרחבת באופן טבעי לשכבות מרובות על ידי השלכת נקודות יעד בין שכבות והוספת נקודות חקירה מיוחדות שמייצגות מיקומי ויאה אפשריים.
להניח להוצאות להנחות את המסלול הטוב ביותר
לאחר שנקודות החקירה זוהו, מודול שני בוחר את המסלול בפועל. אלגוריתם הימנעות המכשולים הזה מתפקד כחיפוש מונחה: הוא שוקל את המרחק שנעשה כבר, את המרחק לכל נקודת מועמד הבאה, את העלות הנוספת של קידוח ויאה לשכבה אחרת, ואת הערכת הקו הישר של המרחק שנותר ליעד. שימוש בגורמים אלה בפונקציית עלות יחידה ובתור עדיפויות מאפשר לאלגוריתם להרחיב תמיד את הצעד המבטיח ביותר. מאחורי הקלעים נבנה גרף דליל של תנועות אפשריות מבלי לפרוס רשת מלאה. כאשר מגיעים לפין היעד, המסלול משוחזר על‑ידי מעקב אחרי קישורים קודמיים שמאוחסנים חזרה אל ההתחלה, ומפיקים מסלול תלת־ממדי שלם שמעקף מכשולים ומחליף שכבות רק כשזה שווה את העלות הנוספת.
ניקוי רשתות מסובכות וחידוד הקווים
בלוחות אמיתיים נדיר שמחברים זוג פינים אחד בלבד בכל פעם. רשתות רבות קושרות שלוש פינים או יותר, וזה עלול להוביל בקלות למבואות מתים או למסלולים מסובכים. 3D LineExplore מתמודד עם מקרים אלה על‑ידי פירוק רשת רב‑פינים לרצף של זוגות פינים של השכן הקרוב, ניתוב שלהם אחד‑אחד, ואז תיקון כישלונות. אם חיבור לא יכול להסתיים כפי שתוכנן, האלגוריתם מחפש חיבור אלטרנטיבי לפין שכבר מחובר בקרבה, ומשחזר את הרשת עם כמות מעטה של חוט נוסף. לאחר שכל הקשרים מאובטחים, שלב עיבוד אחרון משפר את הצורה הפיזית של החוטים. עיצובים מהירים רבים מעדיפים כיפופים של כ־135 מעלות במקום זוויות חדות של 90 מעלות, כדי להקל על הייצור ולהפחית השתקפויות חשמליות. המחברים מציגים התאמה גיאומטרית בסגנון "מקבילית" המשנה מקטעי פולי־ליין למסלולים חלקים יותר ומוגבלים ל‑135 מעלות, תוך שמירה על כל החיבורים ומניעת התנגשות חדשה.
בדיקת השיטה החדשה
הצוות העריך את 3D LineExplore על אחד־עשר לוחות בקרת ביצועים ציבוריים בטווח שבין פשוט למורכב, והשווה אותו לכלים מסחריים ואקדמיים, כולל FreeRouting, ELECTRA, DeepPCB ואלגוריתם A* תלת‑ממדי מותאם. במקרים אלה, השיטה החדשה חיברה בהצלחה כ‑98% מזוגות הפינים הנדרשים, והשוותה או עלתה על המנתבים המוכרים. באופן בולט יותר, אורך הכבל הכולל שלה היה בממוצע קצר יותר — בערך 15% פחות מאחד הכלים המסחריים המובילים — מה שסייע להקטין עיכוב אותא ואובדן הספק. אף על פי שלעיתים השתמשה ביותר ויאות כדי לעקוף גודש, הפשרה זו שיפרה את ניצול המרחב והפחיתה צפיפות בשכבות בודדות. מבחינת מהירות, עיצוב חד‑מעבר, בשילוב עם סריקה מקומית אדפטיבית, אפשרו להשלים את רוב העיצובים בשניות, ובחלק מההגדרות החיפוש האדפטיבי קיצץ את זמן הניתוב ביותר מ‑90% בהשוואה לחיפוש כוחני על לוח מלא, תוך הגדלת אורך הכבל רק במעט.
מה המשמעות עבור האלקטרוניקה של העתיד
במילים פשוטות, 3D LineExplore מציע למתכנני PCB דרך לנתב לוחות צפופים ורב‑שכבתיים בצורה הדומה לדרך שבה נעשה הדבר על‑ידי מומחה אנושי: על‑ידי הסתכלות מקומית, בחירה רק במסלולי המועמדים השימושיים ביותר, ואיזון בין מסלולים קצרים לעלות שינוי השכבה. היא נמנעת מעלות יתר של רשתות צפופות ועדיין מכבדת כללי תכנון קפדניים ומייצרת עקבות חלקים וניתנים לייצור. ככל שהאלקטרוניקה ממשיכה לגדול במורכבות ולהצטמצם בגודל, גישות כאלה — ובייחוד בשילוב עם הנחיה עתידית מבוססת למידת מכונה — עשויות להפוך את הניתוב האוטומטי למהיר ואמין יותר, לסייע לדור הבא של המכשירים להגיע לשוק מהר יותר ולעבוד ביעילות רבה יותר.
ציטוט: Sun, N., Zhang, J., Xu, N. et al. 3D LineExplore: a 3D line exploration method for multi-layer PCB geometric routing. Sci Rep 16, 6588 (2026). https://doi.org/10.1038/s41598-026-36925-0
מילות מפתח: ניתוב PCB, לוחות רב‑שכבתיים, אלגוריתם ללא רשת, אוטומציה של תכנון אלקטרוני, תכנון מסלולים תלת‑ממדי