Clear Sky Science · he
זיהוי עצמים על SoC קצה עם משאבים נמוכים: מבחן רב-פעמי והנחיות לפריסה
למה שבבים זעירים מצליחים במצלמות חכמות
הרבה מהמכשירים "החכמים" סביבנו — מצלמות אבטחה, רחפנים, חיישנים תעשייתיים ופעמונים — צריכים לזהות אנשים וחפצים בזמן אמת, אך מסתמכים על שבבים קטנים וברת־צריכה במקום על תשתיות כבדות של מרכזי נתונים. חברות רבות בוחרות במודלי ה-YOLO הפופולריים לזיהוי עצמים, אך המהירות המוצהרת של השבבים אומרת מעט על הביצוע בשטח. המאמר הזה בוחן באופן ניסויי קפדני כיצד תשעת הגרסאות המודרניות של YOLO מתנהגות על שלושה מעבדי Rockchip נפוצים וזולים, וחושף מה באמת משפיע על מהירות, צריכת אנרגיה ואמינות כשהאינטליגנציה עוברת אל הקצה.
שלושה שבבים יום‑יומיים תחת המיקרוסקופ
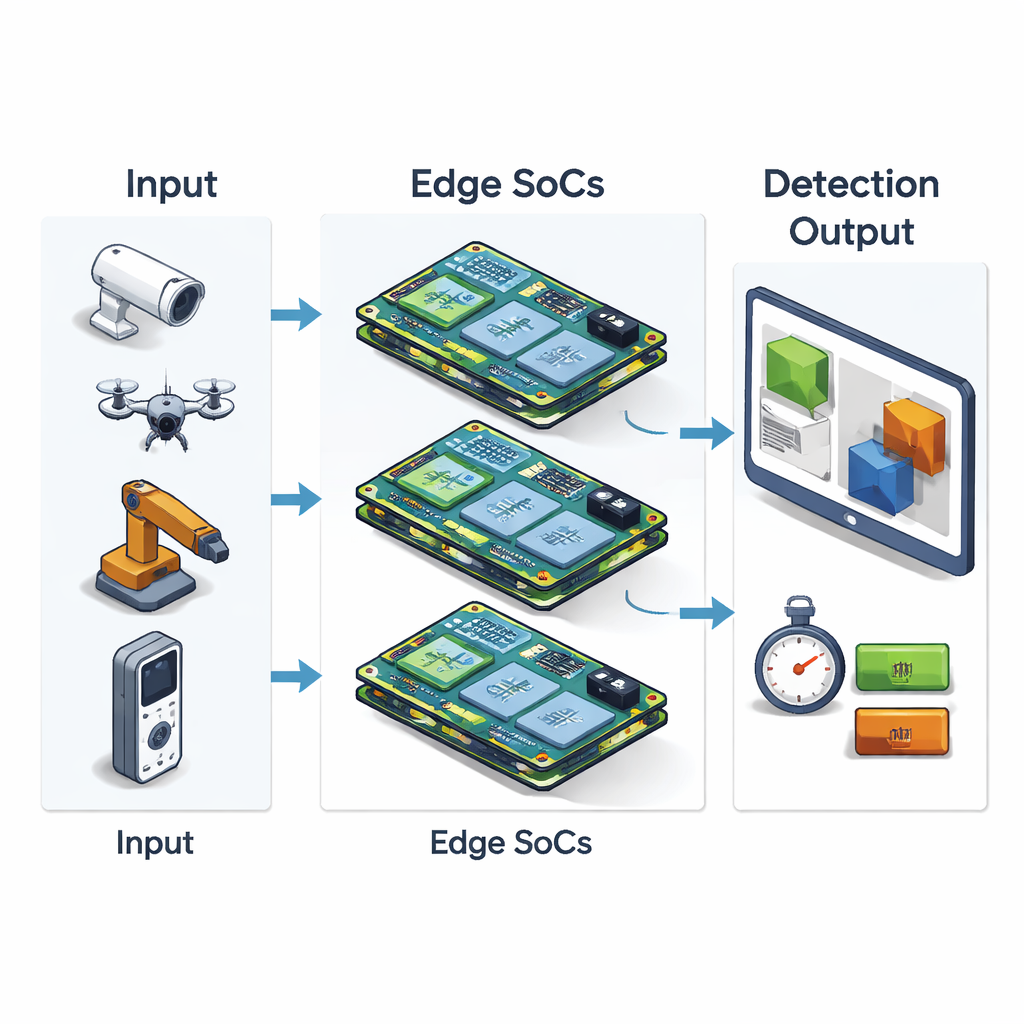
המחברים מתמקדים בשלושה SoC מסחריים שמזינים בדממה מערכות ראייה משובצות רבות: ה‑RV1106 הקטן, ה‑RK3568 הבינוני וה‑RK3588 העוצמתי יותר. כל אחד מהם משלב ליבות מעבד רגילות עם יחידת עיבוד ניאורונלית (NPU) ייעודית וזכרון חיצוני. על פלטפורמות אלה הצוות מריץ תשעה מודלי YOLO — שלוש דורות (YOLOv5, YOLOv8, YOLO11) בשלושה גדלים (Nano, Small, Medium) — כולם מאומנים על אותו מערך מבחן. הם ממירים בזהירות את המודלים לפורמט משותף, מקטינים דיוק לאריתמטיקה בת 8‑סיביות, קומפיילים עם כלי Rockchip ואז מריצים מאות בדיקות מדודות כדי לקבל מדדים יציבים של השהייה, צריכה ואנרגיה לכל פריים מעובד.
המהירות אינה מה שמפרט הדאטה‑שיט מרמז
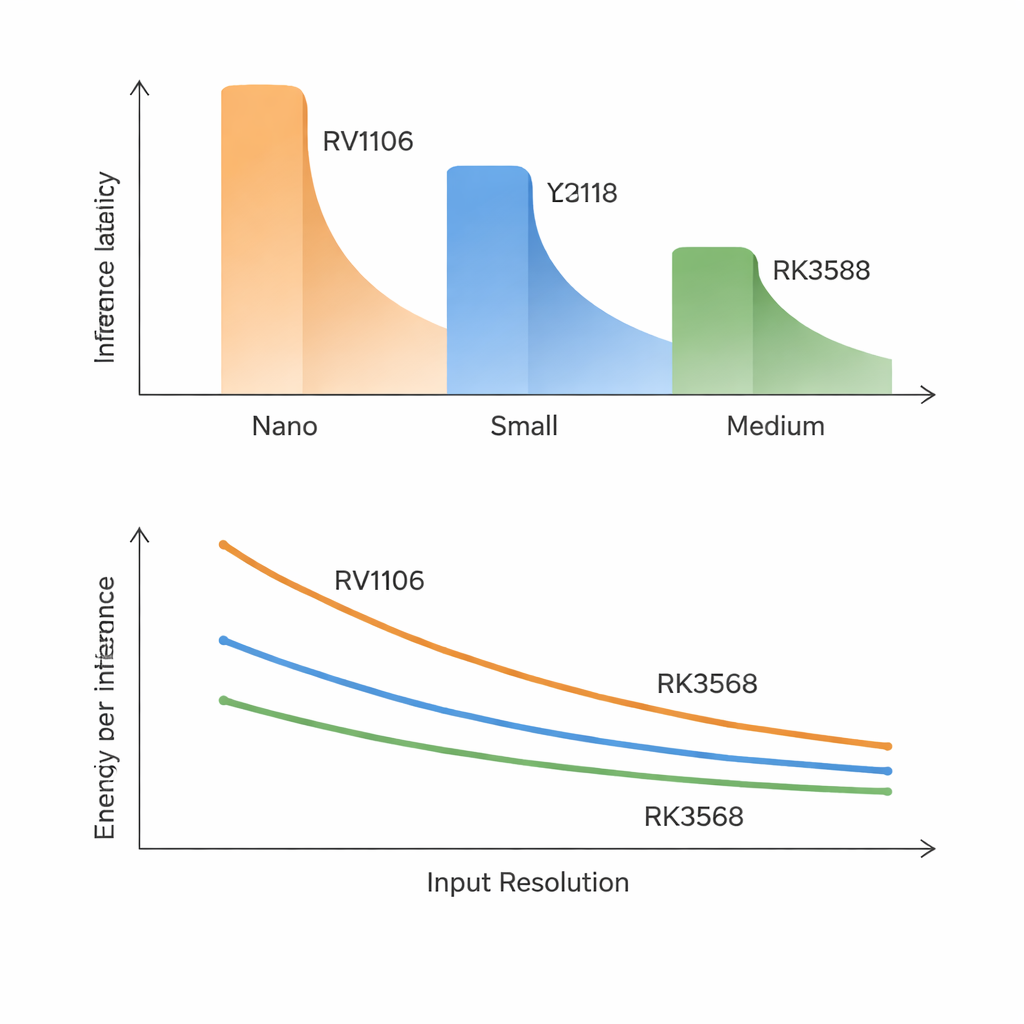
אחד הלקחים הברורים הוא שמספרים של מודלים ושבבים אינם מנבאים היטב את המהירות בשטח. על השבב האיטי ביותר, אפילו המודלים הקטנים לוקחים כ‑70–100 מילישניות לפריים והמודלים בגודל בינוני איטיים מדי לשימוש בזמן אמת. השבב המהיר ביותר מסוגל להפעיל מודלי Nano ורבים מה‑Small קרוב לסמן של 30 פריימים לשנייה, אך מודלים גדולים יותר עדיין לא מגיעים ליעדי קצב פריימים גבוהים. באופן מפתיע, ההשהייה מתיישרת יותר עם הדיוק של המודל מאשר עם מספר האופרציות או הפרמטרים שלו. עיצובים חדשים של YOLO שמגבירים דיוק מוסיפים בלוקים פנימיים שמיטיבים עם הדיוק אך מקשים על ביצועם על NPUs אלה, כך ש"חכם יותר" לעתים קרובות אומר "בולט בעיכוב" על חומרה כזו.
כשתמונות גדולות ושיתוף זיכרון נגמרים בצורה כואבת
המחקר מראה שהגדלת התמונות אינה מעלה את העבודה בצורה חלקה בלבד. תאורטית, הכפלת רוחב וגובה אמורה להגדיל את העלות בארבעה; אך על שבבים בעלי רוחב פס נמוך הדבר עלול לגדול אף יותר. ככל שהתמונות גדלות, הנתונים הביניים כבר לא מתאימים בנוחות ויש לשגרם שוב ושוב לזכרון החיצוני. על ה‑SoC הקטן והבינוני הדבר הופך לעומס תנועה: מודלים בגודל בינוני מאיטים הרבה יותר מהצפוי ושימוש כבד בזיכרון מרקע מטלות אחרות יכול לנפח השהיות ב‑50–270%. לעומת זאת, ה‑RK3588, עם רוחב פס זיכרון גבוה יותר בהרבה, מתמודד עם העלאת רזולוציה בחן ולא מתרשם כמעט מעומס CPU או זיכרון נוסף, מה שמבליט שרוחב הפס של הזיכרון — לא כוח העיבוד הגולמי — לעיתים קרובות מהווה צוואר הבקבוק האמיתי.
יותר ליבות ויותר כוח אינם מבטיחים יעילות
השבב המהיר של Rockchip מכיל NPU בעל שלוש ליבות, אך הרצת YOLO על פני מספר ליבות מספקת רק יתרונות מתונים. עבור רוב המודלים, פיצול העבודה על שתי או שלוש ליבות מקצר השהייה בפחות מ‑10%, ולפעמים הביצועים אף מתדרדרים. העלות של תיאום בין הליבות ושיתוף מאגר הזיכרון מבטלת חלק גדול מהרווח התיאורטי. מדידות צריכת הכוח מוסיפות טוויסט נוסף: שלושת ה‑SoC צורכים רק כמה וואטים בזמן הריצה, אך האנרגיה לפריים מעובד יכולה להשתנות בפקטור של שלוש. ה‑RK3588 היוקרתי צורך יותר כוח ברגע נתון אך מסיים את העבודה כל כך מהר שלעיתים רבות הוא הבחירה היעילה ביותר מבחינת אנרגיה, במיוחד עבור מודלים בגודל בינוני וברזולוציות גבוהות יותר.
מסקנות מעשיות להתקנים בעולם האמיתי
לקריאה למעצבים של מצלמות חכמות, רובוטים או מכשירי IoT, המסר ברור. על השבבים הקטנים, רק מודלי YOLO זעירים ברזולוציות בינוניות מעשיים, ואף אז וידאו בזמן אמת יהיה מאתגר. שבבים בינוניים יכולים לתמוך בנוחות במודלים קטנים ולפעמים גם בבינוניים אם אפשר להקל על שיעורי פריימים או חיי סוללה. ה‑RK3588 בקצה העליון עושה סוף סוף ריאלי להריץ וריאנטים מדויקים יותר ובינוניים של YOLO ועדיין לשמור על אנרגיה לפריים תחת שליטה. בכל המקרים, המאמר טוען שמעצבים צריכים לבחור מודלים מתוך מחשבה על החומרה, לשים לב לרוחב הפס של הזיכרון ולהעדיף טכניקות חיסכון בזיכרון על פני מרדף אחרי רשתות גדולות יותר. מה שבאמת קובע אינו ה‑tera‑operations לשנייה המוצהרות, אלא האם המערכת כולה יכולה לספק זיהוי עצמים מהיר, יציב וחסכוני אנרגיה בתנאים המסורבלים של העולם האמיתי.
ציטוט: Kong, C., Li, F., Yan, X. et al. Object detection on low-compute edge SoCs: a reproducible benchmark and deployment guidelines. Sci Rep 16, 5875 (2026). https://doi.org/10.1038/s41598-026-36862-y
מילות מפתח: בינה קצה, זיהוי עצמים, ראייה משובצת, מודלי YOLO, SoC צר־צריכת־אנרגיה