Clear Sky Science · he
נחיתת quadrotor על קיר באמצעות בקרה רציפה אדפטיבית מדרגה שנייה בנוכחות אי־ודאויות
למה חשוב שיכולים להדביק רחפנים לקירות
דמיינו רחפן קטן שלא רק מרחף עד שכל הסוללה תתרוקן, אלא יכול לנחות בשקט על קיר כמו ציפור, ואז להישאר שם שעות בצפייה על גדת גשר, שדה גידול או קצה יער. מאמר זה מציג שיטה חדשה לשליטה ברחפנים כאלה כדי שיוכלו לטוס אל משטח אנכי, ליצור מגע בלי להקפיץ כלפי חוץ ולהיתפס שם באופן יציב גם כאשר האוויר סוער או שהתנהגות הרחפן אינה ידועה במדויק. העבודה מתמודדת עם האתגר להפוך מכונה מעופפת עדינה לכלי בדיקה אמין וחסכוני באנרגיה.
מרובוטים מרחפים למודיענים צמודי קיר
רחפנים קטנים עם ארבעה מדחפים, או קוואדרוטורים, משמשים כבר למיפוי, בדיקות בנייה, מעקב אחרי חיות בר ולחקלאות מדויקת. עם זאת, מגבלת השהייה שלהם היא סיבולת: מרחיפה צורכת הרבה סוללה. הדבקה על משטח—כמו קיר, עמוד או התחתית של גשר—מאפשרת לרחפן לכבות רוב המנועים ולשמור על החיישנים במקום לצורך תצפית ארוכת טווח. ביצוע זאת באופן בטוח אינו טריוויאלי. במהלך המניפולציה הקצרה אך הקריטית של הנחיתה, הרחפן חייב להתקרב לקיר, לגעת בו ולהתמקם בנטיה קדמית בלי להקפץ, להחליק או לאבד שליטה כאשר רוחות פתאומיות או שגיאות במודל מטלטלות את תנועתו.
האתגר של נחיתה נקייה על קיר
המחברים חוקרים קוואדרוטור המצויד בזרוע תמיכה קלה בחזית, המשמשת נקודת המגע הפיזית עם הקיר. כאשר הרחפן עובר מטיסה חופשית למגע, מיקומו (צידית, קדמית, גובה) ויציבתו (זוויות גלגול, הטייה וסיבוב) קשורים זה בזה באופן הדוק: שינוי בכיוון משנה כיצד דחף מתורגם לתנועה, וכוח תגובה פתאומי מהקיר יכול לסובב את גוף הרחפן. מעבר לכך, השפעות במציאות—כמו אינטראקציות אווירודינמיות בקרבת הקיר, אי־דיוקים בבנייה ורעש חיישנים—פועלות כהפרעות לא ידועות. טכניקות בקרה חסינות קיימות יכולות לשמור על יציבות הרחפן, אך לעיתים גורמות ל"צ'אטרינג" תדיר בקלטי המנוע, משחיקות את החומרה, ורק מבטיחות שהשגיאות יקטנו בהדרגה במקום להיעלם במסגרת זמן קצר וברי חיזוי.
דרך חכמה יותר לאזן ולהתאים
כדי להתגבר על הבעיות הללו, המאמר מציג סכמת בקרה רציפה אדפטיבית מדרגה שנייה (ASOCC). במילים פשוטות, הבקר בוחן לא רק עד כמה תנועת הרחפן סוטה מהיעד, אלא גם עד כמה הטעות משתנה במהירות, ומעצב את הפקודות כך ששניהם יתייצבו לאפס בפרק זמן סופי. צופה הפרעות משולב פועל כמו "מאזין רעש" בזמן אמת, מעריך את ההשפעה הכוללת של כוחות לא ידועים וחוסר התאמות במודל ומזין מידע זה חזרה לחוק הבקרה. החשוב מכך, הגיינים שקובעים עד כמה הבקר מגיב מותאמים תוך כדי פעולה לפי הערכות אלו, במקום להיות קבועים מראש. כיוון שאותות הבקרה משתנים בצורה חלקה במקום להתחלף בפתאומיות, העיצוב מפחית במידה רבה את הצ'אטרינג ועדיין שומר על חוסן גבוה.
בדיקת הבקרה החדשה
החוקרים ניתחו תחילה את המתמטיקה של זוג הצופה‑בקר והוכיחו, באמצעות פונקציות ליאפונוב בדמות אנרגיה, שכל שגיאות התנועה מתכנסות לאפס בתוך זמן סופי למרות הפרעות חסומות. לאחר מכן הם סימולו תרחישי נחיתה אגרסיביים בתוכנה, חשפו את מודל הרחפן לכוחות דמויי רוח, לרעשי מדידה אקראיים ולשגיאות יזומות בפרמטרים הפיזיקליים שלו. בניסויים אלה, ASOCC הדריך את הרחפן בשלושה שלבים—הכנה, התקרבות ונחיתה—והשאיר את השגיאות במיקום ובכוונה קטנות ואת קלטי הבקרה חלקים. בהשוואה למספר אלטרנטיבות מתקדמות, כולל בקרי מצב גלישה ובקרים מבוססי‑מודל מקובלים, השיטה החדשה חיתכה מדדי עקיבה מרכזיים בכ־35–55 אחוז.
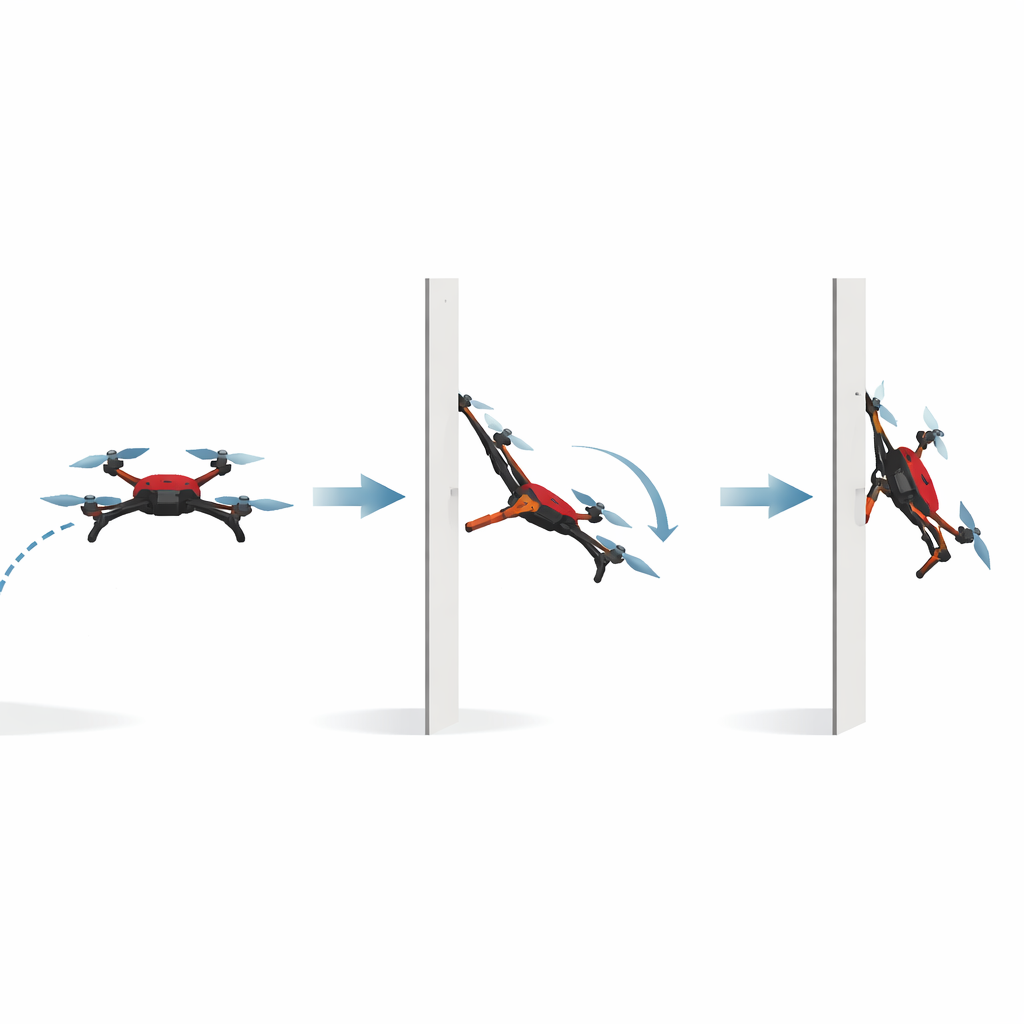
מהסימולציה לרחפן אמיתי על קיר
מעבר לסימולציות, הצוות בנה קוואדרוטור מזערי לנחיתה הכולל לוח טיסה מסחרי ושלד מודפס בתלת‑ממד עם זרוע קדמית. בניסויים מקורה, הרחפן טס אוטונומית לעבר קיר משופע, עלה לגובה של כמידה מטר ואז הטה קדמית כדי ליצור מגע ולהישאר מודבק. נתוני רצף זמן מראים שהגובה, המיקום האופקי וזווית ההטייה עקבו אחרי מסלולם הרצוי בצמוד, עם רק גלים קטנים מרעש חיישנים. למרות חומרה זולה, עיכובי תקשורת ומגבלות פעילים, הרחפן לא הוקפץ או נדנד אחרי המגע, מה שמדגים ש‑ASOCC יכולה להתמודד עם המציאות המורכבת של טיסה.
מה משמעות הדבר עבור מבקרי העבר העתידיים
עבור קוראים לא מומחים, התוצאה המרכזית ברורה: עבודה זו מספקת אסטרטגיית בקרה שמאפשרת לרחפנים קטנים להדבק באופן אמין למשטחים אנכיים ולהישאר שם, אפילו כאשר התנאים אינם מושלמים. על ידי שילוב בקרה חלקה אך תקיפה עם צופה הפרעות אדפטיבי, השיטה מאפשרת נחיתה מהירה ומדויקת ללא הרעידות והעומס על החומרה שנצפים בהרבה בקרים חסינים. זאת פותחת אפשרות לניטור אווירי מתמשך עם סוללות קלות יותר, פלטפורמות פשוטות יותר ובטיחות מוגברת—שלב חשוב לקראת צי של רובוטים "צמודי קיר" אוטונומיים שצופים בשקט על תשתיות, גידולים וסביבות טבעיות.
ציטוט: Gupta, S., Nandanwar, A., Dhar, N.K. et al. Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties. Sci Rep 16, 8578 (2026). https://doi.org/10.1038/s41598-026-36857-9
מילות מפתח: נחיתת quadrotor, בקרה אדפטיבית, בדיקות רחפנים, צופה הפרעות, רובוטיקה אווירית