Clear Sky Science · he
מודל קל משקל מבוסס YOLO לזיהוי מדויק של אשכולות פלפל אדומים בקציר רובוטי
רובוטים חכמים יותר לקצירות חריפות
גרגירי הפלפל הסצ'ואני, הקליפות האדומות הקטנות שמעניקות למטבח הסצ'ואני את העקצוץ המפורסם שלו, מפתיעות בקושי שבקליטתם. הפרי גדל באשכולות צפופים וקוצניים שניתנים לפגיעה בקלות, וקצירתם ביד היא איטית ועונתית. מחקר זה מציג מערכת ראייה ממוחשבת חדשה בשם Red-YOLO, שנועדה לעזור לרובוטים ניידים קטנים לאתר במהירות ובדיוק את אשכולות הפלפל העדינים האלה במטעים אמיתיים, גם כאשר הפרי חופף או מוסתר על ידי עלים.
מדוע קליטת פלפלים כל כך מאתגרת
שונה מפירות גדולים וחלקים כמו תפוחים, גרגירי הפלפל האדומים גדלים כטיפות קטנות רבות הדחוסות יחד על ענפים קוצניים. האשכולות יכולים להיראות שונה מאוד מעץ לעץ: חלקם דחוסים וצפופים, אחרים רופפים ומפוזרים, וכולם מוקפים ברקעים מסבכים של ענפים, עלים ושינויים בתאורה. עבור רובוט, לראות היכן אשכול אחד מסתיים ואיפה מתחיל אחר — ועד כמה הוא דחוס — קריטי. כוח האחיזה ואפילו גודל כלי הקטיף של הרובוט צריכים להשתנות בהתאם לצפיפות האשכול, אחרת שקיות השמן העדינות של הפלפלים עלולות להיקרע, מה שיפגע באיכות ובערך.
בניית מאגר תמונות מהעולם האמיתי
מכיוון שלא היו אוספי תמונות ציבוריים עבור הגידול הזה, החוקרים נאלצו תחילה ליצור מאגר נתונים משלהם. במשך שתי עונות גידול במחוז חאניוּאן שבסצ'ואן צילמו הם עצי פלפל במטעים אמיתיים באמצעות טלפון חכם צרכני, ותיעדו 960 תמונות מרובעות ברזולוציה גבוהה בזוויות שמש וזמני יום שונים. כל תמונה תוייגה בקפידה ביד, תוך הבחנה בין אשכולות דחוסים לאשכולות רופפים. כדי ללמד את המערכת להתמודד עם שונות, שינו דיגיטלית רבות מהתמונות — כוונון בהירות וקונטרסט, היפוך אופקי, עיוותים של רשתות ותמרונים של סיבוב. זה הרחיב את סט האימון ליותר מ-4,300 תמונות, בעוד סט קטן של תמונות שלא עברו שינוי נשמר בצד כדי לבחון באופן כנה את ביצועי המערכת הסופית.
מודל ראייה ממוחשבת רזה וחד
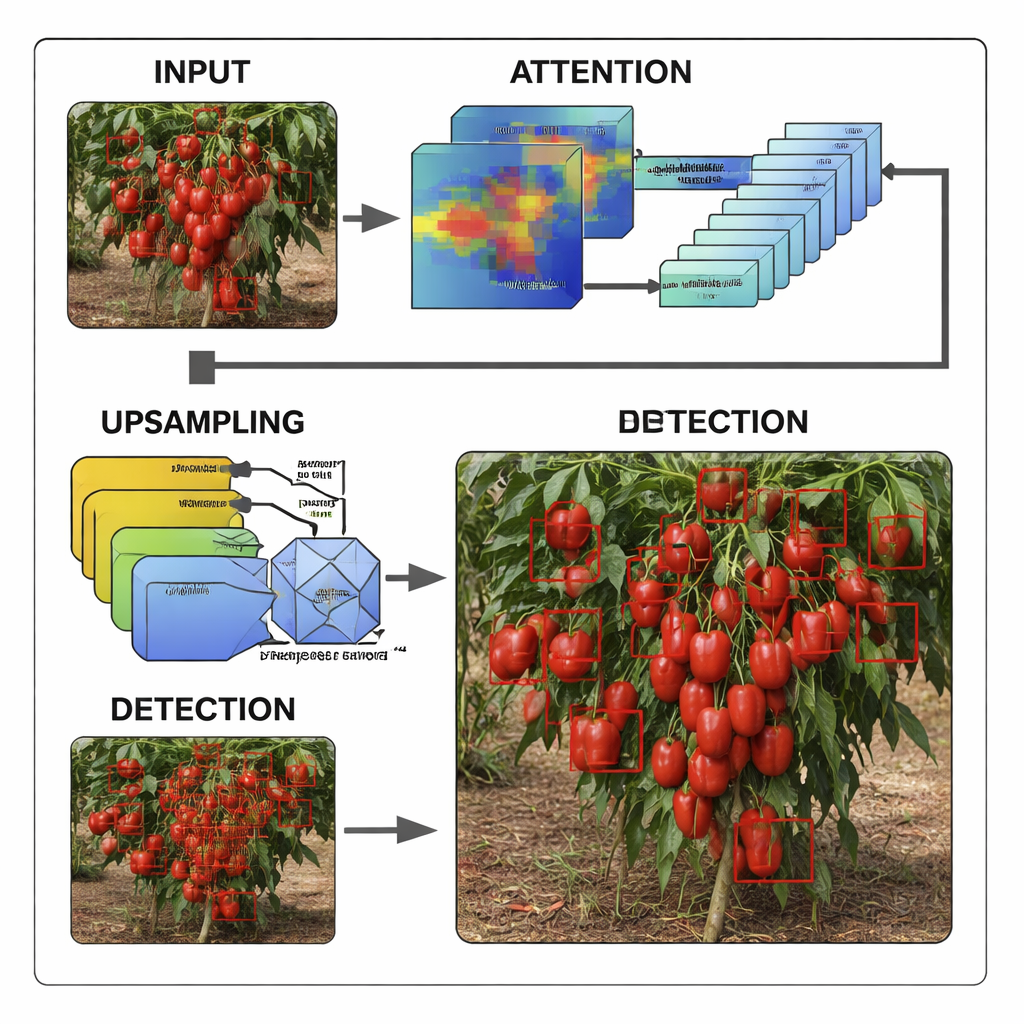
בלב המערכת עומד YOLOv8, מודל זיהוי עצמים נפוץ מסוג "you only look once" שמאתר אובייקטים במעבר יחיד ומהיר במקום במספר שלבים איטיים יותר. הצוות התאימם גרסה מאוד קטנה של המודל ואז שינו אותה במיוחד עבור אשכולות פלפל אדומים. הם הוסיפו מודול קשב שמלמד את הרשת להתמקד בערוצים ובאזורים הסבירים ביותר להכיל פרי תוך התעלמות מהסחות דעת כמו שמיים, ענפים ועצים מרוחקים. הם מחדשו חלקים מהרשת כך שתוכל למחזר מידע ביעילות גדולה יותר ולהקטין חישובים מיותרים. כמו כן החליפו שלב שינוי גודל פשוט בלוק העלאה חכמה שבונה מחדש פרטים ודפנות סביב פלפלים חופפים, ועוזר למודל להבחין היכן מתחילים ומסתיימים אשכולות צפופים.
ראייה מהירה ומדויקת לרובוטים קטנים
כדי לבדוק האם השינויים אכן משתלמים, השוו החוקרים את Red-YOLO למערכות זיהוי ישנות וכבדות יותר ולמגוון גרסאות YOLO קלות מודרניות. מודלים מסורתיים מרובי שלבים, אף על פי שהם חזקים, היו פשוט איטיים וצורכי משאבים גבוהים מדי לרובוטים קומפקטיים במטע. כמה גרסאות YOLO חדשות עמדו טוב יותר אך נתקלו בקשיים עם אשכולות קטנים, חלקית מוסתרים או רקעים עמוסים, לעתים החמצו פרי או בלבלו עלים עם פלפלים. Red-YOLO מצא איזון טוב יותר: זיהה אשכולות פלפל בדיוק וזכירה גבוהים יותר מכל דגמי ההשוואה, תוך שמירה על גודל מודל של פחות משלושה מיליון פרמטרים ועומס חישובי נמוך מספיק לעיבוד מוטמע. ניסויים בסצנות מטע מגוונות הראו כי Red-YOLO מצא באובחנה יציבה אשכולות גם כאשר הפרי היה זעיר, מוצל או חופף במידה רבה.
ממדגם מעבדה לעוזר במטע
לאלקטרונאים שאינם מומחים, התוצאה המעשית חשובה: עבודה זו מראה שמערכת ראייה קומפקטית ומכווננת בקפידה יכולה לספק "עין" אמינה לרובוטים קטנים בקציר. עם Red-YOLO, הרובוט יכול באופן אוטומטי לזהות האם הוא מטפל באשכול דחוס או רופף ולהתאים את גודל המלקט וכוח האחיזה לפני הקטיף, מה שמפחית נזק וחוסך עבודה. בעוד שהמחקר הנוכחי מתמקד במין פלפל אחד באזור יחיד, אותו גישה — בניית מאגרי נתונים ממוקדים ושיפור מודלים רזים לזיהוי — ניתנת להרחבה לגידולים מיוחדים אחרים. ככל שמערכות הראייה הללו יהפכו לעמידות ולשימושיות יותר, הן עשויות לסייע להפוך את הקציר למהיר, בטוח ועקבי יותר, ולהבטיח אספקה יציבה של הפלפלים שמניעים כמה מהטעמים האהובים בעולם.
ציטוט: Zhao, H., He, J., Li, Y. et al. A lightweight YOLO-based model for accurate detection of red pepper clusters in robotic harvesting. Sci Rep 16, 5879 (2026). https://doi.org/10.1038/s41598-026-36671-3
מילות מפתח: קציר רובוטי, זיהוי פלפלים, ראייה ממוחשבת, YOLO קל משקל, חקלאות חכמה